


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
RESEARCH OF DYNAMIC MODES OF VOLUMETRIC HYDRAULIC DRIVE WITH DIESEL ENGINE MOBILE DRILLING MACHINE

Силовой гидравлический привод (ГП) буровых машин с дизельными двигателями разделяют на два типа: механический и гидромеханический. В настоящее время большее распространение получил гидромеханический привод как наиболее эффективный и экономичный [1]. Дальнейшее повышение экономичности ГП буровых машин приводит к необходимости исследований его совместной работы с дизелем как единой теплогидромеханической системы (ТГМС). Результаты исследований, по определению рациональных режимов функционирования таких систем, что позволяет снизить себестоимость буровых работ и затраты на геологоразведку. В этой связи исследования, направленные на повышение экономичности и рационального использования энергоресурсов являются актуальными [2, 3].
Повышение экономичности работы ГП эффективно исследовать с применением компьютерных технологий моделирования, позволяющих производить виртуальные испытания. Для этого необходимы более совершенные обобщённые модели ГП, а именно, их технические, физические, математические и компьютерные модели, объединённые с одноимёнными моделями источников и потребителей энергии привода. Обобщённые модели ГП должны быть моделями единых теплогидромеханических систем (ТГМС), удобными для использования в системах автоматизированного проектирования (САПР).
Обобщённая модель объёмного гидропривода с дизелем
В качестве объекта моделирования здесь рассматривается теплогидромеханическая система буровой машины УРБ-2,5С (производство ООО «Завод Стройнефтемаш») [4]. Модель исследуемого дизеля (мощностью 240 л.с.) является геометрической моделью, построенной на базовой модели дизеля типа Д100, описанной в работе [5]. В качестве базовой модели гидромашин исследуемой системы приводов здесь выбрана модель объёмной обратимой гидравлической машины типа 310.4.112 (рис. 1).
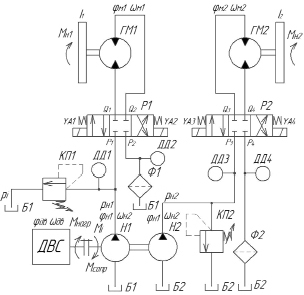
Рис. 1. Принципиальная схема технической модели гидропривода с дизелем и разветвлённой объёмной гидроприводной системой: ГМ1, ГМ2 – гидромотор; ДВС – дизель; ДД1 – ДД4 – датчики давления; Р1, Р2 – гидравлические распределители; Н1, Н2 – объёмные насосы; КП1, КП2 – клапаны
Исходные данные для моделирования
|
№ п/п |
Параметры |
Обозначение |
Диапазон |
|
1 |
Внешняя нагрузка, Н·м |
M |
0–240 |
|
2 |
Коэффициент перегрузки |
kперегр |
0,35 |
|
3 |
Коэффициент сопротивления вращению вала дизеля |
Kсопр |
0,153 |
|
4 |
Угол поворота вала дизель-двигателя, рад/с |
φ |
0–41,9 |
|
5 |
Радиус кривошипа, м |
Rкрш |
0,062 |
|
6 |
Диаметр поршня дизеля, м |
Dп |
0,101 |
|
7 |
Рабочий объём гидродвигателя, м3 |
qм |
1,543·10-4 |
|
8 |
Объёмный КПД гидродвигателей |
ηм1об |
0,95 |
|
9 |
Рабочий объём насосов, м3 |
qн |
1,7·10-4 |
|
10 |
Объёмный КПД насоса |
ηн1об |
0,95 |
|
11 |
Давление на входе в гидромотор, Па |
pмвх |
1,9·107 |
|
12 |
Давление на выходе гидромотора, Па |
pмвых |
2,9·105 |
|
13 |
Давление в напорной линии насоса, Па |
pнвых |
2,0·107 |
Конструктивная особенность моделируемого объёмного гидропривода с дизелем состоит в том, что он представляет собой одновременно работающую и независимую друг от друга разветвленную систему объёмных приводов (рис. 1) с двумя однотипными объёмными насосами и разными по типу гидромоторами. Первый гидромотор (ГМ1) обеспечивает вращательное движение бурового инструмента, второй (ГМ2) – поступательное.
Исходными данными для технического моделирования исследуемой системы приводов послужили кинематические, гидравлические, а также – энергетические параметры теплогидромеханической системы (дизель – гидронасос – гидромотор) реальной машины УРБ-2,5С. Исходные данные для моделирования представлены в таблице.
Математическая модель объёмного гидропривода с дизелем
Математическая модель объёмного гидропривода с дизелем представляет собой систему дифференциальных и алгебраических уравнений, описывающих тепловые, гидравлические, а также механические процессы, сопровождающие работу привода на различных режимах его эксплуатации. Отметим, что число дифференциальных уравнений системы в процессе работы модели привода может изменяться, например, при включении нового источника или потребителя энергии привода.
В работе используется аппарат математического моделирования так называемых гибридных динамических систем [6]. Эти системы являются математическими моделями физических объектов, поведение которых непрерывно меняется в зависимости от изменения как сигналов управления, так и внешних воздействий.
1.2.1. Подмодель кинематики гидромашин привода:








 ,
,




Здесь τ – время процесса; τнагр – время начала действия нагрузки; φдвгр, φдв, φ – углы поворота вала дизеля в градусах и в радианах соответственно; ω – угловая скорость вала дизеля; φн1, φн2, φм1, φм2, ωн1, ωн2, ωм1, ωм2 – углы поворота (в радианах) и угловые скорости вращения валов насосов и моторов соответственно; ηноб1, ηноб2, ηмоб1, ηмоб2 – объёмные КПД насосов и моторов, соответственно; qн1, qн2, qм1, qм2 – рабочие объёмы насосов и моторов соответственно.
1.2.2. Подмодель гидронасосов и гидромоторов как многопоршневых гидромашин:

Здесь  ,
,  – вращающие моменты на валах насосов и моторов, учитывающие работу всех поршней объёмных машин, соответственно; Δрн, Δрм – перепады давления рабочей жидкости на гидронасосе и гидромоторе, обусловленные внешней нагрузкой, соответственно;
– вращающие моменты на валах насосов и моторов, учитывающие работу всех поршней объёмных машин, соответственно; Δрн, Δрм – перепады давления рабочей жидкости на гидронасосе и гидромоторе, обусловленные внешней нагрузкой, соответственно;  ,
,  – объёмные расходы рабочей жидкости через насосы и моторы, учитывающие подачу всех цилиндров, соответственно;
– объёмные расходы рабочей жидкости через насосы и моторы, учитывающие подачу всех цилиндров, соответственно;  – производная по времени от объёмной подачи насоса;
– производная по времени от объёмной подачи насоса;
Приведенные характеристики гидронасосов и гидромоторов как многопоршневых объёмных гидромашин рассчитываются по отдельным программам, учитывающим работу каждого поршня машины.
1.2.3. Подмодель, описывающая топливные и индикаторные характеристики базовой модели дизеля (типа Д100):






Здесь  гор – массовый расход подаваемого горючего; kгор – коэффициент, учитывающий скорость горения топлива; n – частота вращения вала дизеля, об/мин; Vh – суммарный объём цилиндров двигателя; ηi – индикаторный КПД дизеля; piПа – индикаторное давление, Па; pi – индикаторное давление, кгс/см2; Qгор – низшая теплотворная способность горючего, Дж/кг; Мi – вращающий индикаторный момент, развиваемый валом двигателя, Дж.
гор – массовый расход подаваемого горючего; kгор – коэффициент, учитывающий скорость горения топлива; n – частота вращения вала дизеля, об/мин; Vh – суммарный объём цилиндров двигателя; ηi – индикаторный КПД дизеля; piПа – индикаторное давление, Па; pi – индикаторное давление, кгс/см2; Qгор – низшая теплотворная способность горючего, Дж/кг; Мi – вращающий индикаторный момент, развиваемый валом двигателя, Дж.
1.2.4. Подмодель внешней нагрузки:













Здесь τперегр – время начала действия перегрузки; kнагр, kперегр – коэффициенты, учитывающие скорость возрастания нагрузки и перегрузки соответственно; Δрм1, Δрм2, Δрн1, Δрн2 – перепады давления на гидромоторах и гидронасосах; Δрм1потерь, Δрм2потерь – потери давления в моторных каналах за счёт трения; Мн1, Мн2, – моменты сил сопротивления вращению валов насосов, определяемые внешней нагрузкой; Мсопр, Мнагр – вращающие моменты сил сопротивления и внешней нагрузки на валу дизеля.
1.2.5. Подмодель движения вала дизеля с объёмным гидроприводом.



Здесь  – угловое ускорение вала дизеля; J – момент инерции вращающихся частей двигателя и внешней нагрузки;
– угловое ускорение вала дизеля; J – момент инерции вращающихся частей двигателя и внешней нагрузки;  – суммарный вращающий момент нижнего вала дизеля (рассчитывается по отдельной программе для дизеля типа Д100) [5]; Мсопр, Мнагр – вращающие моменты сил сопротивления и внешней нагрузки на валу дизеля соответственно; SП, lkr – коэффициенты моделирования: SП – коэффициент моделирования, равный отношению площади поршня двигателя исследуемой модели к площади поршня базового двигателя типа Д100 соответственно; lkr – коэффициент моделирования, равный отношению длины кривошипа двигателя модели к длине двигателя Д100 соответственно.
– суммарный вращающий момент нижнего вала дизеля (рассчитывается по отдельной программе для дизеля типа Д100) [5]; Мсопр, Мнагр – вращающие моменты сил сопротивления и внешней нагрузки на валу дизеля соответственно; SП, lkr – коэффициенты моделирования: SП – коэффициент моделирования, равный отношению площади поршня двигателя исследуемой модели к площади поршня базового двигателя типа Д100 соответственно; lkr – коэффициент моделирования, равный отношению длины кривошипа двигателя модели к длине двигателя Д100 соответственно.
Результаты компьютерных исследований
На рисунках, представленных ниже, показаны результаты исследования особенностей различных режимов совместной работы объёмного гидропривода буровой машины с дизелем как единой теплогидромеханической системы.
Так, на рис. 2–4 показаны особенности запуска системы, выход системы на холостой ход, а также работа системы с нагрузкой и перегрузкой.
а) б)
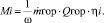
Рис. 2. Характеристика динамических режимов работы дизеля
а) б)
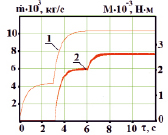
Рис. 3. Характеристика работы дизеля с системой объёмных приводов
Запуск дизеля начинается при τ = 0 (рис. 2). Выход системы на холостой ход дизеля заканчивается через 3 с после запуска дизеля. После этого начинает действовать расчётная нагрузка τНАГР = 3 с. Перегрузка начинает действовать при τПЕРЕГР = 6 с. При этом частота вращения вала дизеля уменьшается (см. кривую на рис. 2, б), так как подача топлива (кривая 1 на рис. 2, а) в это время не увеличивается в соответствие с нагрузкой (см. кривую 2 на рис. 2, а), а остаётся постоянной.
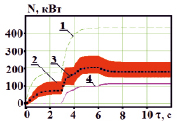
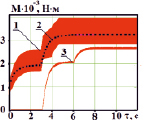
На рис. 3, а, можно видеть особенности изменения: мощности тепловой энергии, используемой дизелем (кривая 1), мощности крутильных колебаний его вала (кривая 2), индикаторной мощности дизеля (кривая 3), а также – мощности внешней нагрузки (кривая 4). На рис. 4, б показан характер изменения: крутильных колебаний вала дизеля (кривая 1), вращающего индикаторного момента (кривая 2), а также – вращающего момента внешней нагрузки (кривая 3).
На рис. 4можно видеть, как изменяется экономичность совместной работы дизеля с системой объёмных приводов на исследуемых режимах. Здесь кривая 1 характеризует изменение полного КПД дизеля, кривая 2 – изменение его индикаторного КПД.
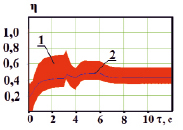
Рис. 4. Показатели эффективности работы дизеля с системой объёмных приводов на исследуемых режимах
Выводы
В работе выполнены исследования динамических режимов работы гидравлического привода буровой машины с дизелем.Исследования проведены с помощью оригинального метода, отличающегося учётом особенностей совместной работы дизеля (движения каждого поршня) с системой гидравлических приводов. Выполнены исследования характера изменения крутильных колебаний вала дизеля, а также – вращающего индикаторного момента при работе дизеля с системой приводов буровой машины на холостом ходу, с нагрузкой и перегрузкой, позволяющие выявить особенности влияния внешних нагрузок на характер расхода топлива и частоту вращения вала дизеля.
Предлагаемый способ моделирования позволяет повысить точность расчётов до 15–17 %, а также качество исследования динамических процессов, сопровождающих работу гидроприводов буровых установок с дизелем на различных режимах их эксплуатации как единых теплогидромеханических систем.
Библиографическая ссылка
Озерский А.И., Сидоренко В.С., Ракуленко С.В., Полешкин М.С. ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ РЕЖИМОВ РАБОТЫ ОБЪЁМНОГО ГИДРОПРИВОДА С ДИЗЕЛЕМ МОБИЛЬНОЙ БУРОВОЙ МАШИНЫ // Фундаментальные исследования. 2017. № 12-1. С. 85-90;URL: https://fundamental-research.ru/en/article/view?id=41984 (дата обращения: 07.07.2026).
DOI: https://doi.org/10.17513/fr.41984