


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
THE TRAFFIC MANAGEMENT AT THE CIRCULAR INTERSECTION IN OPERATING CONDITIONS OF INTELLIGENT TRANSPORTATION SYSTEMS

Обострение транспортных проблем, вызванное увеличением интенсивности движения автомобилей, особенно заметно в узловых точках сети и проявляется в росте величины задержек транспортных средств, в появлении заторов, излишнем расходе топлива, ухудшении экологической ситуации, снижении безопасности движения. С целью повышения безопасности движения и увеличения пропускной способности в двадцатых годах прошлого столетия в зарубежных странах начали устраивать кольцевые пересечения [1]. В 1960-х годах первые кольцевые пересечения появились и в СССР. К преимуществам кольцевых пересечений в одном уровне можно отнести, например, снижение потерь времени на пересечении, лучшие условия выполнения разворота и левого поворота, ликвидация конфликта встречных потоков, большая пропускная способность, снижение аварийности.
Существуют различные типы кольцевых пересечений и различные схемы организации движения на них [2]. Исследования в этой области проводятся как зарубежными [3, 4], так и российскими учеными [5]. В большинстве случаев существующая архитектурная застройка городов не позволяет менять планировочные решения. Однако неравномерность движения автотранспорта сказывается на степени эффективности организации движения в местах пересечения транспортных потоков, в том числе и на кольцевых пересечениях. И повлиять на эту ситуацию можно с помощью изменения организации движения по мере необходимости. Соверешенствование схем организации движения позволяет находить решение транспортных проблем без больших материальных зартат.
Развитие автоматизированных систем управления дорожным движением в рамках интеллектуальных транспортных систем (ИТС) дает возможность в режиме on-line реагировать на изменение дорожной ситуации.
Математическая модель движения транспортных средств на кольцевых пересечениях
Существуют две основные группы моделей кольцевых пересечений: эмпирические и аналитические (вероятностные). Эмпирический подход основан на получении регрессионных моделей, которые оценивают пропускную способность второстепенного направления по экспериментальным данным об интенсивности главного потока. Регрессионные модели применяют в Великобритании и ФРГ.
Аналитические методы по виду распределения интервалов между автомобилями в потоке, используя аппарат теории вероятностей и теории случайных процессов, определяют средние характеристики качества организации движения на кольцевом пересечении. Их применяют, например, в США, Австралии, Финляндии.
В работе [6] авторами предложена аналитическая модель движения транспортных средств на кольцевом пересечении в одном уровне, которая включена в общую модель TIMeR_Mod (Transportation Intelligent Mesoscopic Real-time Model). Базовой гипотезой для разработки модели явяляется гипотеза о распределении интервалов по времени между транспортными средствами по обобщенному закону Эрланга. Авторами было экспериментально доказано, что эмипирическое распределение интервалов в транспортном потоке хорошо согласуется с этим распределением при широком диапазоне интенсивностей.
Кольцевое пересечение в модели TIMeR_Mod рассматривается как совокупность конфликтных точек и дуг между ними. В случае кольцевого саморегулируемого движения на кольце средняя задержка (в секундах) в каждой конфликтной точке одного транспортного средства выбранного второстепенного направления A с учетом очереди равна
 (1)
(1)
где
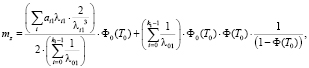
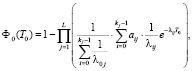
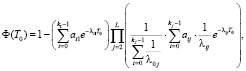
 – среднее число автомобилей в очереди, (2)
– среднее число автомобилей в очереди, (2)
 – параметры обобщенного закона Эрланга для выбранного потока A, входящего в конфликтную точку;
– параметры обобщенного закона Эрланга для выбранного потока A, входящего в конфликтную точку;
 – параметры обобщенного закона Эрланга для каждого из L конфликтных для потока A транспортных потоков;
– параметры обобщенного закона Эрланга для каждого из L конфликтных для потока A транспортных потоков;
Т0 – приемлемый временной интервал между автомобилями в конфликтных потоках для продолжения движения транспортными средствами потока A.
Все необходимые для расчетов данные содержатся в матрицах ASTREETS и BINTERSECTION модели TIMeR_Mod.
Для определения времени прохождения транспортным средством кольцевого пересечения с помощью модели TIMeR_Mod необходимо иметь следующие данные:
– количество въездов на кольцо (A, B, C, D,… – по часовой стрелке);
– организация движения (вариант 1–4);
– скорость движения на кольце;
– на векторах AB, BC, CD,... : количество полос, интенсивность; главное или второстепенное движение.
Ниже приведены варианты построения функции транспортных затрат на кольце при различных схемах организации движения [2] на нем для наиболее часто встречающейся ситуации пересечения двух дорог:
 (3)
(3)
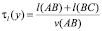
где τl(y) – затраты на прохождение дуги y между двумя конфликтными точками,  =
=  – средняя задержка в данной конфликтной точке.
– средняя задержка в данной конфликтной точке.
Вариант 1. Организация движения с предоставлением преимущественного права проезда транспортным средствам, движущимся по кольцевой проезжей части.
Конфликтная точка – точка слияния потоков на въезде на кольцо. Главное направление – движение по кольцу. Для определения величины τlz(y) применяется разработанный авторами аналитический аппарат (формула (1) для узловой точки I типа – нерегулируемое пересечение).
Величина τl(y) рассчитывается следующим образом (с точностью до обозначений, А – точка въезда на кольцо):
 – поворот направо;
– поворот направо;
 – движение прямо;
– движение прямо;
 – поворот налево.
– поворот налево.
Здесь приняты следующие обозначения: l(M1M2) – длина участка M1M2; v(M1M2) – скорость на участке M1M2.
Вариант 2. Организация движения с предоставлением преимущественного права проезда по одной из пересекающихся дорог. Главная дорога проходит в прямом направлении.
Пусть с точностью до обозначений, А – точка въезда на кольцо. Тогда функция транспортных затрат определяется следующим образом:
–  – при повороте направо;
– при повороте направо;
–  – при движении прямо;
– при движении прямо;
– 
 – при повороте налево.
– при повороте налево.
Величина τlz(y) равна нулю, если движение транспортного средства проходит по главному направлению. Если по второстепенному, то τlz(y) рассчитывается по формуле (1) для узловой точки I типа (нерегулируемое пересечение требований).
Вариант 3. Ни одно из направлений движения не выделено как главное. Водители должны руководствоваться «Правилами дорожного движения» и уступать дорогу транспортным средствам, приближающимся справа. По этому варианту организации движения приоритетом в движении в зоне слияния кольцевых пересечений пользуется поток, входящий на пересечение.
В этом случае въезд на кольцо – без задержек. Пусть опять с точностью до обозначений, А – точка въезда на кольцо. Тогда функция транспортных затрат определяется следующим образом:
–  – при повороте направо;
– при повороте направо;
–  – при движении прямо;
– при движении прямо;
–  – при повороте налево.
– при повороте налево.
Вариант 4. Организация движения на кольцевом пересечении, когда главная дорога изменяет свое направление. Этот вариант организации движения на кольцевых пересечениях применяется сравнительно редко.
В данном случае схема расчетов аналогична варианту 2. А – точка въезда на кольцо (с точностью до обозначений). Тогда функция транспортных затрат определяется следующим образом:
–  – при повороте направо;
– при повороте направо;
–  – при движении прямо;
– при движении прямо;
– 
 – при повороте налево.
– при повороте налево.
Величина τlz(y) равна нулю, если движение транспортного средства проходит по главному направлению. Если по второстепенному, то τlz(y) рассчитывается по формуле (1).
Варианты 1 и 3 организации движения также укладываются в схему расчетов для вариантов организации движения 2 и 4. Поэтому при составлении базы данных, описывающей кольцевое пересечение, достаточно указывать пункт «– на векторах AB, BC, CD,... : количество полос, параметры распределения обобщенного закона Эрланга для интервалов; главное или второстепенное движение».
Управление в динамическом режиме
Для обеспечения эффективной организации движения недостаточно иметь автомобильную дорогу с заданными техническими характеристиками и оборудованную необходимой дорожной информацией. Необходима кроме этого гибкая система управления, позволяющая реагировать на изменения в режиме движения и прогнозировать оптимальные схемы организации движения транспортных средств. Транспортным потоком можно управлять с помощью изменения параметров движения, изменения направления движения. Это возможно делать с помощью управляемых дорожных знаков на базе световодов или светодиодов. К критериям, с помощью которых можно определять эффективность той или иной организации движения, можно отнести задержки, длину очереди, время проезда, количество вынужденных остановок.
Структура базы данных для моделирования движения на кольцевом пересечении
|
К-во въездов на кольцо |
Скорость движения на кольце |
Дуга АВ |
Дуга ВС |
… |
||||
|
К-во полос |
Параметры распределения интервалов |
Приоритет |
К-во полос |
Параметры распределения интервалов |
Приоритет |
… |
||
В работе [5] изучены критерии эффективности различных схем организации движения на саморегулирующихся кольцевых пересечениях. Рассматривались четырехлучевые кольцевые пересечения с диаметром центрального направляющего островка от 30 до 80 метров. Для них определены границы применения одного из четырех (см.выше) вариантов организации движения. В качестве критериев выбраны средняя задержка и длина очереди. Методика выбора представлена в работе [5, с. 111–112]. Кольцевое пересечение рассматривается как совокупность четырех въездов на кольцо, то есть как комплекс четырех Т-образных примыканий. На каждом въезде определяется вариант организации движения: приоритет кольцевому потоку или приоритет въезжающему потоку.
Информация о состоянии транспортных потоков на улично-дорожной сети, необходимая для расчетов в рамках модели TIMeR_Mod, содержится в матрицах ASTREETS и BINTERSECTION. Ранее авторами описаны методы сбора с помощью видеорегистраторов необходимой для данных матриц информации и ее обновления в динамическом режиме [7]. С целью обновления информации о состоянии транспортных потоков и его прогнозирования на следующий краткосрочный период времени применяется фильтрация Кальмана. На каждом этапе прогнозируемые данные корректируются с помощью данных, полученных путем непосредственных измерений. В результате по имеющейся информации о состоянии транспортных потоков на кольцевом пересечении для определения наиболеее эффективного в текущий момент способа организации движения предлагается действовать по следующему алгоритму:
– по формулам (1) и (2) определить среднюю задержку и длину очереди в выбранном узле;
– по алгоритму [5, с. 111–112] определить организацию движения на данном въезде на кольцо;
– отобразить необходимую информацию в базах данных ASTREETS и BINTERSECTION;
– отобразить необходимую информацию на управляемых дорожных знаках.
Заключение
В условиях ИТС возможна гибкая система управления движением на саморегулирующихся кольцевых пересечениях. Имея информацию, поступающую с видеорегистраторов и отраженную в матрицах ASTREETS и BINTERSECTION, возможно в динамическом режиме управлять движением, выбирая наиболеее оптимальный вариант. Управление в режиме on-line позволяет реагировать на текущую обстановку в транспортной сети и выбирать наиболее эффективный способ организации движения.
Работа выполнена при поддержке РФФИ и администрации Краснодарского края, проект № 16-48-230720 р_а.
Библиографическая ссылка
Наумова Н.А., Домбровский А.Н. ОРГАНИЗАЦИЯ ДВИЖЕНИЯ НА КОЛЬЦЕВОМ ПЕРЕСЕЧЕНИИ В УСЛОВИЯХ ФУНКЦИОНИРОВАНИЯ ИНТЕЛЛЕКТУАЛЬНЫХ ТРАНСПОРТНЫХ СИСТЕМ // Фундаментальные исследования. 2017. № 9-2. С. 342-346;URL: https://fundamental-research.ru/en/article/view?id=41752 (дата обращения: 24.06.2026).