


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
SELECTION OF KINEMATIC STRUCTURE OF AN OPTICAL SWITCH’S MECHANISM

В области изучения взаимодействия оптического излучения с материалами актуальной научно-технической проблемой является разработка оптических коммутаторов, обеспечивающих переключение между каналами оптической системы с набором излучателей. В работах [6, 8] данная проблема рассматривается в комплексе с решением задачи объединения в оптическом коммутаторе функций как автоюстировки, так и переключения оптических каналов. Под автоюстировкой в данном случае понимается компенсация угловых «уводов» оптических осей излучателей от эталонного положения посредством специфического позиционирования и ориентирования оптического элемента (призмы) в пространстве. В соответствии с результатами анализа кинематических схем механизмов с параллельной, параллельно-перекрестной и параллельно-переменной структурой [1?5, 7] и выводами сделанными в работах [6, 8] за основу оптического коммутатора принят юстирующий механизм с параллельной кинематикой.
Цель исследования. Выбор кинематической структуры оптического коммутатора на основе анализа кинематических схем механизмов с параллельной структурой.
Материалы и методы исследования
Манипуляционные системы (МС) с последовательной структурой (с разомкнутой кинематической цепью) состоят из нескольких звеньев, последовательно соединенных различными типами соединений. При выполнении технологических операций со связанным объектом кинематическая цепь замыкается. Если к МС мехатронных и робототехнических устройств предъявляются повышенные требования по грузоподъемности, жесткости и точности, то предпочтение, по сравнению с механизмами с последовательным расположением звеньев, отдается механизмам с параллельной структурой [1–5, 7].
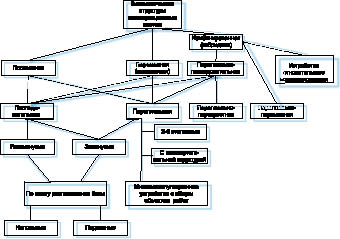
Рис. 1. Кинематические структуры манипуляционных систем
Классификация кинематических структур МС робототехнических и мехатронных устройств может быть представлена в виде, показанном на рис. 1.
Выходное звено механизмов с параллельной структурой (МСПС) связано с основанием несколькими кинематическими цепями, каждая из которых оснащена приводом, либо накладывает некоторое количество связей на движение выходного звена. Поэтому к недостаткам МСПС следует отнести меньшее рабочее пространство по сравнению с классическими последовательными структурами, относительно небольшую их манипулятивность и более сложную конструкцию механизма.
Общее число звеньев кинематической цепи, соединяющей выходное звено МСПС с основанием, не больше шести. Такая кинематическая цепь при отсутствии локальной внутренней подвижности и линейной зависимости между кинематическими винтами пар, налагает D связей на движение выходного звена:
 (1)
(1)
где n – количество промежуточных звеньев цепи; p5, …, p1 – количество одно-, …, пятиподвижных пар (подсчет p5, p4, …, p1 ведется после замены кинематических соединений эквивалентными кинематическими парами). Если D = 0, то присоединяемая цепь не налагает связей на движение выходного звена; при D < 0 в присоединяемой цепи имеется подвижность, не связанная с перемещением выходного звена; если D > 0, то присоединение цепи приводит к уменьшению числа степеней свободы на D.
Далее будут рассматриваться структуры, у которых D ? 0. При этом структурная формула имеет вид:
 (2)
(2)
где W – число степеней свободы механизма; ni – количество промежуточных звеньев i-й соединительной цепи; p5,i, …, p1,i – количество одно-, …, пятиподвижных пар i-й цепи; i, k – номер и число присоединяемых кинематических цепей.
Результаты исследования и их обсуждение
На основе формулы (2) был проведен синтез всевозможных схем МСПС [1, 2] при W = 1…6, k = 2…6. Эти базовые схемы отличаются набором Di в соединительных кинематических цепях. Схемы синтезированы из условия, что каждая соединительная цепь либо должна содержать приводную пару, либо налагать некоторое число связей на движение выходного звена. При этом количество соединительных цепей с Di = 0 не превышает число степеней свободы механизма. Синтезированные схемы классифицированы на основе следующих признаков: число степеней свободы механизма W, число соединительных цепей k, общее число степеней свободы и число пар разных классов в каждой соединительной цепи.
Следующим существенным признаком, значительно расширяющим классификацию, является количество приводов в каждой соединительной кинематической цепи. Из всего многообразия МСПС особый интерес представляет класс механизмов, в которых все звенья работают на растяжение-сжатие. В него входят механизмы, все приводы которых должны быть линейными, а оси сопряженных звеньев должны пересекаться в одной точке.
Методика структурного анализа механизмов параллельной кинематики, предложенная K. Хантом, заключается в выделении неподвижного основания механизма, стойки и выходного звена. Затем вводятся кинематические цепи. Классификация осуществляется по числу степеней свободы, которых лишается механизм при вводе каждой цепи, общему числу степеней свободы механизма и числу кинематических ветвей.
Одним из первых таких механизмов была платформа Стюарта, а позднее ? манипулятор Данилевского. Исследования показали, что, изменяя взаимное расположение центров шарниров основания и выходного звена, можно получить целый ряд МСПС. Разновидности механизмов параллельной структуры подробно рассмотрены в работах [1–5, 7] и др. Классификация механизмов с параллельной структурой представлена на рис. 2.
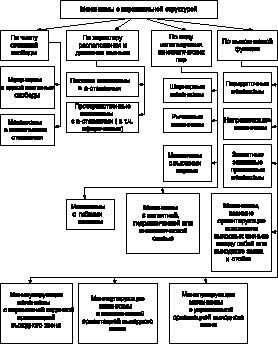
Рис. 2. Классификация механизмов с параллельной структурой
Топологию кинематических связей параллельных механизмов принято описывать рядом букв, кодирующих тип и последовательность кинематических пар, начиная с неподвижной платформы (R – вращательная пара, P – поступательная пара, S – шаровая пара, U или (RR) – карданное соединение). Чтобы выделить, что данная кинематическая пара активная, ее буква подчеркивается.
В области параллельных механизмов с шестью степенями свободы наиболее популярным является 6-UPS параллельный механизм с совмещенными шарнирами, обычно называемый платформой Гафа – Стюарта или гексаподом [1–4, 7]. Гексаподы выполнены на базе шести мехатронных телескопических устройств поступательного перемещения, например шариковых винтовых передач (ШВП). Для изменения их длины служат регулируемые электроприводы. Контроль перемещения осуществляется датчиками положения. Одним концом телескопическое устройство шарнирно соединено с основанием, а другим – с подвижной верхней платформой, на которой расположен исполнительный орган. Программно задавая различное перемещение каждого винта, можно управлять положением ИО по шести координатам.
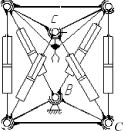
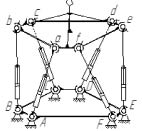
Кинематическая схема классической платформы Стюарта с совмещенными шарнирами представлена на рис. 3, а; схема отличающаяся порядком присоединения приводных звеньев к платформе (Flagge Parallel Manipulators) – на рис. 3, б, с разнесенными шарнирами – на рис. 3, в.
Виды систем приводов платформы Стюарта условно представлены на рис. 4.

а б в
Рис. 3. Кинематическая схема платформы Стюарта: а – с совмещенными шарнирами; б – платформа типа Flagge Parallel Manipulators; в – с разнесенными шарнирами




а б в г
Рис. 4. Система приводов платформы Стюарта: а, б – линейные приводы; в, г – приводы вращательного типа
Существует класс схем МСПС с вращательными приводами. Валы шести вращательных двигателей, установленных на основании, в частности могут иметь кривошипы, перемещающие нижние концы рычагов. Рычаги попарно соединены друг с другом шарнирами.
Второй по популярности параллельный механизм с шестью степенями свободы – это, несомненно, 6-RUS. Часто U соединение в цепи заменяют на S соединение. Это приводит к избыточной степени свободы в каждой связи, однако это не изменяет свойства 6-RUS параллельного механизма. Точно так же U и S соединения каждой штанги можно взаимозаменять без изменения характеристик механизма. Поэтому обычно не делают различий между механизмами типа RUS, RSS или RSU, и все обозначаются как RUS.
Еще один распространенный вид параллельных манипуляторов – это механизмы с топологией 6-PUS. По сравнению с платформой Стюарта масса подвижных частей и вероятность столкновения опор у 6-PUS механизма меньше. Благодаря использованию линейных приводов HEXAPOD-робот с топологией 6-PUS отличается более высокими статическими (особенно механическая жесткость) и динамическими (быстродействие) характеристиками. В случае необходимости размещения на основании и выходном звене элементов кинематических пар приводных цепей возможно увеличение габаритов основания, выходного звена и механизма в целом.
Также возможно исполнение МС по параллельно-последовательной схеме. В этом случае МС состоит из основания, на котором при помощи сферических шарниров крепятся шесть поступательных приводов. Штоки приводов сферическими шарнирами присоединены к крестовине, которая, в свою очередь, является базой для установки линейного привода рабочего органа. Достоинствами данной схемы, по сравнению со стандартной схемой платформы Стюарта, являются: увеличенный рабочий объем за счет введения избыточной степени подвижности (поворот и/или выдвижение рабочего органа) и повышенная маневренность манипулятора. Недостатками данной схемы можно считать все недостатки, присущие стандартной схеме платформы Стюарта, а также наличие консольного элемента, что уменьшает жесткость манипулятора, так как звено рабочего органа работает на изгиб.
Для манипуляционных систем с параллельной кинематикой в работах [1, 2, 7] предложены механизмы параллельно-перекрестной и параллельно-переменной структуры, представляющие собой гибридные (комбинированные) кинематические структуры. На рис. 5 показаны два механизма параллельно-перекрестной структуры с шестью степенями свободы и шестью кинематическими цепями, три из которых расположены параллельно и три перекрестно.
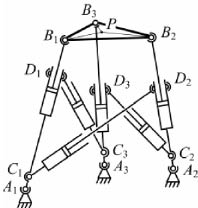
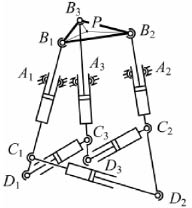
Рис. 5. Манипуляционные механизмы с параллельно-перекрестной структурой
Возможны два варианта расположения приводов: в первом случае все двигатели расположены в рабочей зоне; во втором случае двигатели расположены вне рабочей зоны. Сферические кинематические пары могут быть выполнены в виде совокупности вращательных пар. Такая компоновка может способствовать уменьшению габаритов основания и выходного звена, а также увеличению жесткости.
Неидеальность связей в МСПС (наличие сил и моментов сил трения в кинематических парах) приводит к тому, что вблизи особых положений может произойти заклинивание механизма. Таким образом, работоспособность механизма будет теряться не в самом особом положении, а в некоторой окрестности этого положения. К другому виду особых положений МСПС относятся внутренние связи, которые ограничивают рабочие пространства этих механизмов и могут приводить к потере управляемости. Проведенное цифровое моделирование и экспериментальные исследования подтвердили работоспособность и высокое качество мехатронного устройства оптического коммутатора во всем рабочем пространстве.
Выводы
В качестве юстирующего механизма оптического коммутатора [6, 8] следует выбирать параллельный механизм с топологией 6-UPS по причине сравнительно высокой жесткости и удобства управления оптическим элементом по 6 степеням подвижности. В качестве мехатронных телескопических устройств рекомендуется выбирать цифровые электроприводы с интегрированными датчиками положения и ШВП, т.к. в данном случае возможна реализация динамичного и высокоточного управления положением рабочего органа – призмы.
Работа выполнена при финансовой поддержке РФФИ (проект № 13-08-01364).
Библиографическая ссылка
Егоров И.Н., Кобзев А.А., Потанин Ю.С., Шевцов Д.С. ВЫБОР КИНЕМАТИЧЕСКОЙ СТРУКТУРЫ МЕХАНИЗМА ОПТИЧЕСКОГО КОММУТАТОРА // Фундаментальные исследования. 2015. № 12-4. С. 682-687;URL: https://fundamental-research.ru/en/article/view?id=39604 (дата обращения: 29.07.2026).