В области изучения взаимодействия оптического излучения с материалами актуальной научно-технической проблемой является разработка оптических коммутаторов, обеспечивающих переключение между каналами оптической системы с набором излучателей. В работах [6, 8] данная проблема рассматривается в комплексе с решением задачи объединения в оптическом коммутаторе функций как автоюстировки, так и переключения оптических каналов. Под автоюстировкой в данном случае понимается компенсация угловых «уводов» оптических осей излучателей от эталонного положения посредством специфического позиционирования и ориентирования оптического элемента (призмы) в пространстве. В соответствии с результатами анализа кинематических схем механизмов с параллельной, параллельно-перекрестной и параллельно-переменной структурой [1?5, 7] и выводами сделанными в работах [6, 8] за основу оптического коммутатора принят юстирующий механизм с параллельной кинематикой.
Цель исследования. Выбор кинематической структуры оптического коммутатора на основе анализа кинематических схем механизмов с параллельной структурой.
Материалы и методы исследования
Манипуляционные системы (МС) с последовательной структурой (с разомкнутой кинематической цепью) состоят из нескольких звеньев, последовательно соединенных различными типами соединений. При выполнении технологических операций со связанным объектом кинематическая цепь замыкается. Если к МС мехатронных и робототехнических устройств предъявляются повышенные требования по грузоподъемности, жесткости и точности, то предпочтение, по сравнению с механизмами с последовательным расположением звеньев, отдается механизмам с параллельной структурой [1–5, 7].
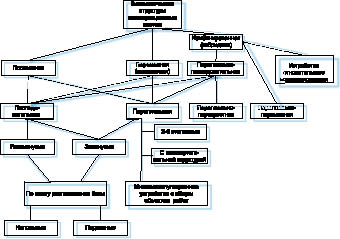
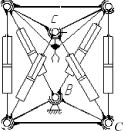
Рис. 1. Кинематические структуры манипуляционных систем
Классификация кинематических структур МС робототехнических и мехатронных устройств может быть представлена в виде, показанном на рис. 1.
Выходное звено механизмов с параллельной структурой (МСПС) связано с основанием несколькими кинематическими цепями, каждая из которых оснащена приводом, либо накладывает некоторое количество связей на движение выходного звена. Поэтому к недостаткам МСПС следует отнести меньшее рабочее пространство по сравнению с классическими последовательными структурами, относительно небольшую их манипулятивность и более сложную конструкцию механизма.
Общее число звеньев кинематической цепи, соединяющей выходное звено МСПС с основанием, не больше шести. Такая кинематическая цепь при отсутствии локальной внутренней подвижности и линейной зависимости между кинематическими винтами пар, налагает D связей на движение выходного звена:
 (1)
(1)
где n – количество промежуточных звеньев цепи; p5, …, p1 – количество одно-, …, пятиподвижных пар (подсчет p5, p4, …, p1 ведется после замены кинематических соединений эквивалентными кинематическими парами). Если D = 0, то присоединяемая цепь не налагает связей на движение выходного звена; при D < 0 в присоединяемой цепи имеется подвижность, не связанная с перемещением выходного звена; если D > 0, то присоединение цепи приводит к уменьшению числа степеней свободы на D.
Далее будут рассматриваться структуры, у которых D ? 0. При этом структурная формула имеет вид:
 (2)
(2)
где W – число степеней свободы механизма; ni – количество промежуточных звеньев i-й соединительной цепи; p5,i, …, p1,i – количество одно-, …, пятиподвижных пар i-й цепи; i, k – номер и число присоединяемых кинематических цепей.
Результаты исследования и их обсуждение
На основе формулы (2) был проведен синтез всевозможных схем МСПС [1, 2] при W = 1…6, k = 2…6. Эти базовые схемы отличаются набором Di в соединительных кинематических цепях. Схемы синтезированы из условия, что каждая соединительная цепь либо должна содержать приводную пару, либо налагать некоторое число связей на движение выходного звена. При этом количество соединительных цепей с Di = 0 не превышает число степеней свободы механизма. Синтезированные схемы классифицированы на основе следующих признаков: число степеней свободы механизма W, число соединительных цепей k, общее число степеней свободы и число пар разных классов в каждой соединительной цепи.
Следующим существенным признаком, значительно расширяющим классификацию, является количество приводов в каждой соединительной кинематической цепи. Из всего многообразия МСПС особый интерес представляет класс механизмов, в которых все звенья работают на растяжение-сжатие. В него входят механизмы, все приводы которых должны быть линейными, а оси сопряженных звеньев должны пересекаться в одной точке.
Методика структурного анализа механизмов параллельной кинематики, предложенная K. Хантом, заключается в выделении неподвижного основания механизма, стойки и выходного звена. Затем вводятся кинематические цепи. Классификация осуществляется по числу степеней свободы, которых лишается механизм при вводе каждой цепи, общему числу степеней свободы механизма и числу кинематических ветвей.
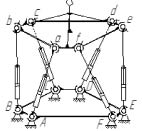
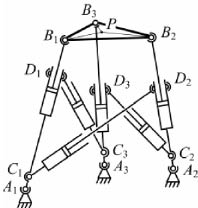
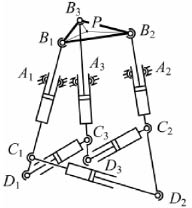
Одним из первых таких механизмов была платформа Стюарта, а позднее ? манипулятор Данилевского. Исследования показали, что, изменяя взаимное расположение центров шарниров основания и выходного звена, можно получить целый ряд МСПС. Разновидности механизмов параллельной структуры подробно рассмотрены в работах [1–5, 7] и др. Классификация механизмов с параллельной структурой представлена на рис. 2.
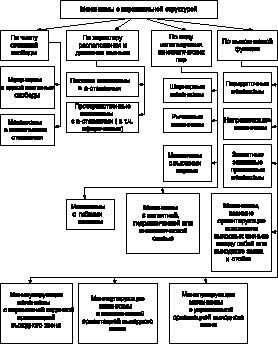
Рис. 2. Классификация механизмов с параллельной структурой