


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
DIAGNOSING SENSORS IDLING VEHICLES IN THE FORMATION OF THE STRESS TEST ACTIONS

В настоящее время значительными темпами развиваются перевозочные услуги [1, 2]. В соответствии с этим наблюдается существенный рост автомобильного транспорта. По некоторым данным ежегодное увеличение парка автомобилей составляет 3–5 %. Число отказов в автомобиле увеличивается пропорционально числу транспортных средств.
Актуальность темы. Современное информационное обеспечение диагностическим оборудованием базируется на принципах: чем большее число отказов в процессе эксплуатации возникает по данному узлу или системе автомобиля и трактора, тем большее информационное обеспечение диагностическим оборудованием сопровождает данный узел или систему. При этом затраты на разработку и исследование новых диагностических средств для диагностирования данного узла или системы также возрастают. Однако новые диагностические средства часто не позволяют с заданной достоверностью определять техническое состояние элементов систем двигателя.
Целью настоящей работы является повышение эффективности процесса диагностирования датчиков холостого хода автомобилей при формировании стрессовых тестовых воздействий.
В работе [2] представлены данные по числу неисправностей и отказов элементов систем двигателя: свечи – 19,7 %, датчик положения дроссельной заслонки – 17,8 %, датчик массового расхода воздуха – 14,7 %, регулятор холостого хода – 13,2 %, модуль зажигания – 9,4 %, датчик кислорода – 6,8 %, датчик температуры – 4,3 %, регулятор топливного давления – 3,1 %, топливный насос – 2,2 %, датчик детонации – 1,0 %, прочие – 8,7 %.
По данным Кузнецова Е.С., распределение отказов %, элементов системы управления работой бензиновых ДВС выглядит следующим образом: электрические цепи – окисление контактов и обрыв проводов – 35 %; электробензонасос – 22 %; регулятор холостого хода – 10 %; элементы системы зажигания – 9 %; форсунки – 8 %; датчик кислорода – 7 %; датчики и реле – 6 %; электронный блок управления – 3 %.
Регулятор холостого хода занимает 3–4 место по числу неисправностей.
Теоретические исследования
Рассмотрим укрупненную структурную схему взаимосвязи систем ДВС автотракторных средств (рис. 1).

Рис. 1. Укрупненная структурная схема взаимосвязи систем ДВС автотракторных средств: ДМРВ – датчик массового расхода воздуха; ДПДЗ – датчик положения дроссельной заслонки; РХХ – регулятор холостого хода; ДТемпВ – датчик температуры впускаемого воздуха; ДПРВ – датчик положения распределительного вала; λ-зонд – датчик кислорода; ДПКВ – датчик положения коленчатого вала; ДД – датчик детонации; ДДавлВ – датчик давления воздуха; ΔРФВ, ΔRФВ – падение давления на фильтре, мПа и сопротивление фильтра системы впуска; RВВ – сопротивление ДМРВ; %отк – процент открытия дроссельной заслонки; UДПВ – выходное напряжение датчика положения дроссельной заслонки, В; QРВ, RРВ – подача воздуха через регулятор холостого хода, м3/с и его сопротивление; tТВ – температура впускаемого воздуха, °С; ΨПРВ – угол поворота распределительного вала, град; QВВ – подача воздуха, м3/с; tВВ, ΨВВ – время и угол открытия впускного клапана; Uλ, Iλ – выходные напряжение, В и ток датчика кислорода, А; UДД – напряжение, генерируемое датчиком детонации, В; n – частота вращения коленчатого вала ДВС, мин–1; UДВ – выходное напряжение датчика давления подаваемого воздуха, В
На рис. 1 представлены: системы энергообеспечения, МСУД, впуска и их отдельные компоненты. Система впуска включает фильтр, ДМРВ, ДПДЗ, заслонку, РХХ, ДТемпВ, ДПРВ, впускные клапана. МСУД может управлять заслонкой – в зависимости от нагрузки ДВС и частоты вращения, РХХ – за счет обеспечения заданного количества шагов штока и варьирования количества воздуха, впускными клапанами – за счет автоматического изменения фаз газораспределительного механизма.
Из представленной на рис. 1 схемы видно, что система энергообеспечения является системообразующей для остальных систем: МСУД, впуска. Причем все больше периферийных систем и механизмов включается в общую систему энергообеспечения. Поясним структурные связи внутри схемы. Система впуска обеспечивает значения параметров подачи воздуха QВВ, времени tВВ и угла открытия впускного клапана ΨВВ. При этом МСУД корректирует эти параметры и адаптирует под изменяющиеся режимы и конкретные условия эксплуатации [1, 2, 3, 4, 5]. На выходе ДВС при работе перечисленных систем датчики фиксируют изменения выходного напряжения Uλ и тока датчика кислорода Iλ, напряжение, генерируемое датчиком детонации UДД, частоту вращения коленчатого вала ДВС, выходное напряжение датчика давления подаваемого воздуха UДВ. На основании этих выходных данных ДВС микропроцессорная система управления ДВС формирует воздействия в виде изменения коэффициента топливокоррекции, коэффициента избытка воздуха, угла опережения зажигания и др. При этом система энергообеспечения традиционно питает все электропотребители, но и в значительной степени задействована в процессе поддержания обмена информацией, управления элементами, внутреннего диагностирования практически всех систем, адаптацией работы систем к изменяющимся техническому состоянию систем и условиям эксплуатации [2, 5].
Таким образом, степень охвата управлением, коррекцией и адаптивностью данных систем очень высока и все более повышается. Поэтому процесс диагностирования элементов системы впуска связан как с МСУД, так и с системой энергоснабжения [1, 2].
Материалы и методы исследований
Для выявления неисправности РХХ в процессе запуска ДВС наблюдается степень выдвижения штока (количество шагов). А далее проверяется быстрота корректирующих действий РХХ и степень адаптивности под стресс-тест [2, 5, 6, 7, 8, 9].
Для проверки быстроты корректирующих действий РХХ предлагается выключить из работы два цилиндра одновременно и проверить время реакции до момента добавления числа шагов [2, 9]. Можно записать условие для времени реакции tp:
tp = to + tc, (1)
где to – время отключения цилиндров, с; tc – время коррекции числа шагов РХХ, с.
При этом частота вращения коленчатого вала ДВС на двух оставшихся цилиндрах должна быть кратной частоте вращения холостого хода или на 10 % большей:
np = nxx + Δn10 %, (2)
где nxx – частота вращения холостого хода ДВС, мин–1; Δn10 % – максимальная прибавка частоты вращения коленчатого вала ДВС, мин–1.
Результаты исследований и их обсуждение
При проведении экспериментальных исследований фиксировались значения выходных данных процесса диагностирования РХХ двигателя в виде интерфейса экспериментальных данных (рис. 2).
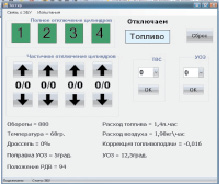
Рис. 2. Интерфейс экспериментальных данных при 4 работающих цилиндрах: Обороты – частота вращения коленчатого вала двигателя, мин–1; Температура – температура охлаждающей жидкости, °С; Дроссель – процент открытия дроссельной заслонки, %; Поправка УОЗ – поправка угла опережения зажигания, град; Положение РДВ – положение регулятора добавочного воздуха, шагов; Расход топлива – л/ч; Расход воздуха – кг/ч; Коррекция топливоподачи; УОЗ – угол опережения зажигания, град
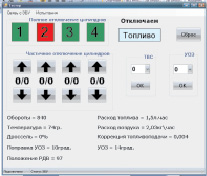
Далее фиксировался интерфейс экспериментальных данных при выключении одного, двух цилиндров (рис. 3, а, б).
Полученные в результате экспериментальных исследований данные были сведены в таблицу.
 а
а 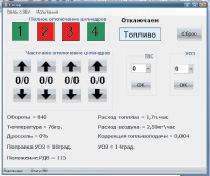 б
б
Рис. 3. Интерфейс экспериментальных данных: а – при одном выключенном из работы цилиндре; б – при двух выключенных из работы цилиндрах
Экспериментальные данные
|
Количество работающих цилиндров |
Частота вращения коленчатого вала, мин–1 |
Температура охлаждающей жидкости, °С |
Процент открытия дроссельной заслонки, % |
Поправка угла опережения зажигания, град |
Положение РХХ, шагов |
Расход топлива, л/ч |
Расход воздуха, кг/ч |
Коррекция топливоподачи |
Угол опережения зажигания, град |
|
4 |
880 |
89 |
0 |
5 |
94 |
1,4 |
19,8 |
0,004 |
14 |
|
3 |
880 |
88 |
0 |
5 |
97 |
1,5 |
20,3 |
0,004 |
14 |
|
2 |
880 |
89 |
0 |
5 |
115 |
1,7 |
25,9 |
0,004 |
14 |
Из представленных в таблице данных видно, что при последовательном изменении числа работающих цилиндров происходит компенсация падения частоты вращения двигателя за счет добавления числа шагов РХХ. При исправном РХХ процесс компенсации падения частоты вращения двигателя происходит мгновенно и удерживается на уровне частоты холостого хода. Данный диагностический параметр очень чувствителен к изменению технического состояния РХХ и с высокой достоверностью позволяет определять его техническое состояние [2, 9].
Выводы
В результате проведенных исследований установлено, что число неисправностей и отказов регулятора холостого хода составляет – 10–15 % от общего числа отказов элементов систем двигателя. Регулятор холостого хода занимает 3–4 место по числу неисправностей. На сегодня степень охвата управлением, коррекцией и адаптивностью систем впуска, МСУД, энергообеспечения очень высока и все более повышается. Поэтому процесс диагностирования элементов системы впуска следует проводить с учетом влияния МСУД, системы энергоснабжения путем создания стрессовых тестовых воздействий. При этом проверяется быстрота корректирующих действий РХХ и степень адаптивности под стресс-тест. Для выявления неисправности РХХ в процессе запуска ДВС наблюдается также степень выдвижения штока (количество шагов). При последовательном изменении числа работающих цилиндров происходит компенсация падения частоты вращения двигателя за счет добавления числа шагов РХХ. При исправном РХХ процесс компенсации падения частоты вращения двигателя происходит мгновенно и удерживается на уровне частоты холостого хода. Данный диагностический параметр очень чувствителен к изменению технического состояния РХХ и с высокой достоверностью позволяет определять его техническое состояние.
Рецензенты:
Машрабов Н.М., д.т.н., профессор кафедры «Технология и организация технического сервиса», Челябинская государственная агроинженерная академия, г. Челябинск;
Ерофеев В.В., д.т.н., профессор, заведующий кафедры «Технология и организация технического сервиса», Челябинская государственная агроинженерная академия, г. Челябинск.
Работа поступила в редакцию 17.10.2014.
Библиографическая ссылка
Плаксин А.М., Гриценко А.В., Глемба К.В., Ганиев И.Г., Граков Ф.Н. ДИАГНОСТИРОВАНИЕ ДАТЧИКОВ ХОЛОСТОГО ХОДА АВТОМОБИЛЕЙ ПРИ ФОРМИРОВАНИИ СТРЕССОВЫХ ТЕСТОВЫХ ВОЗДЕЙСТВИЙ // Фундаментальные исследования. 2014. № 11-4. С. 774-778;URL: https://fundamental-research.ru/en/article/view?id=35631 (дата обращения: 28.05.2026).