



Ежегодное расширение нефтегазовых магистралей (анализ показывает, что эксплуатационная длина нефте- и газопроводов ежегодно увеличивается в среднем на 3–5 тыс. км), а также существенность постоянного и тщательного контроля за их состоянием и наличие опасных факторов значительно обостряют вопросы необходимости повышения автоматизации проведения контрольно-профилактических и ремонтных мероприятий с целью сокращения временных, финансовых затрат и трудовых затрат. В частности, мероприятия по облуживанию нефтегазовых магистралей сопряжены с вырезанием на их поверхности полостей больших размеров и сложной формы, что в настоящее время осуществляется непосредственно оператором с помощью специальных приспособлений, устанавливаемых на поверхностях резания и несущих головку гидрореза и систему подвода воды с абразивом.
Для реализации процесса автоматизации гидрорезания целесообразно применение специально адаптированного с учетом специфики выполняемого технологического процесса, а также ограничений со стороны объекта и внешней среды, мобильного робототехнического комплекса (МРК). Данный комплекс состоит из транспортного мобильного робота и расположенного на нем технологического робота (ТР), в схвате или специальном приспособлении которого находится головка гидрорезания струей жидкости с абразивом [1].
Отправной точкой при разработке робототехнического комплекса гидрорезания является разработка кинематической структуры технологического манипулятора, а также определение геометрических параметров звеньев. При структурном синтезе механизма манипулятора необходимо учитывать следующее:
1) кинематические пары манипуляторов снабжаются приводами, включающими двигатели и тормозные устройства, поэтому в схемах манипуляторов обычно используются одноподвижные кинематические пары: вращательные или поступательные;
2) необходимо обеспечить не только заданную подвижность схвата манипулятора, но и такую ориентацию осей кинематических пар, которая обеспечивала необходимую форму зоны обслуживания, а также простоту и удобство программирования его движений;
3) при выборе ориентации кинематических пар необходимо учитывать расположение приводов (на основании или на подвижных звеньях), а также способ уравновешивания сил веса звеньев;
4) необходимо учитывать габаритные размеры и конфигурацию технологического объекта, расположение вырезаемых поверхностей и полостей.
Процесс гидроабразивной резки относится к категории гибридных. Рабочим инструментом, или рабочим телом, здесь является водная струя с абразивом, но в то же время по конструктиву инструмент не представляет единое жесткое тело. Он состоит из двух ничем между собой не связанных физически, механически и химически разнородных материалов, находящихся в одном объеме и перемещающихся под действием высокого давления при истечении из сопла [9].
Исходными при выборе кинематики нефтепроводов и нефтехранилищ являются данные, определенные в работе [1]. Систематизируем эти данные и сведения в табл. 1. Одним из специфических и сложных конструкторских вопросов является выполнение трубопроводов высокого давления, подводящих рабочее тело к соплу гидрореза. В этом плане желательно минимальное число звеньев робота.
Анализ обозначенных объектов резания свидетельствует о проблематичности создания универсального ТР. Следует определить требования для каждого случая, выбрать базовую кинематику, размеры плеч и проанализировать варианты их совместимости с позиции возможной реализации.
Вопросы выбора кинематики рассмотрены достаточно широко в различных источниках [3–4, 8, 10]. В работах [5–6] приведены результаты выбора кинематики при наличии ограничений в рабочем пространстве. В данном случае ТР при выполнении технологического процесса:
1) расположен на неподвижном основании (платформе транспортной системы или мобильного робота);
2) работает с объектами, имеющими вполне определенную форму;
3) ограничения в пространстве взаимодействия робота с объектом отсутствуют.
Поэтому воспользуемся наиболее простой и близкой методикой выбора кинематики, приведенной в работе [2]. В работе приведены 18 характерных кинематических схем, даны их рабочие зоны и аналитические зависимости. Среди большого многообразия компоновок манипуляторов промышленных роботов можно выделить шесть основных, наиболее часто применяемых: сферическая – одна из первых компоновок, при которой устройство управления, как правило, объединено с корпусом манипулятора; цилиндрическая – достаточно распространенная компоновка, часто встречающаяся в легких и средних промышленных роботах; рычажная (антропоморфная) – перспективная компоновка, удельный вес которой постоянно возрастает; прямоугольная – отличается относительно высокой жесткостью и точностью; горизонтально-плечевая; портальная. Анализ типовых схем манипуляторов применительно для рассматриваемого процесса гидрорезания показал, что наиболее целесообразным является применение трехзвенного или четырехзвенного манипулятора, работающего в ангулярной сферической системе координат.
Таблица 1
Параметры объектов резания и основные требования, предъявляемые к процессу гидрорезания нефтепроводов
|
№ п/п |
Параметр |
Значение |
|
1 |
Расположение нефтепроводов относительно уровня поверхности: а) наземные б) подземные в) надземные |
< 1–2 м > 2–4 м |
|
2 |
Диаметр труб, мм |
200–1200 |
|
3 |
Диаметр и высота нефтехранилищ, мм |
10000, 5000 |
|
4 |
Профили вырезаемых поверхностей нефтепроводов при виде по нормали к поверхности: а) прямоугольник с максимальными размерами, мм×мм б) окружность с радиусом, мм |
400×1200 600 |
|
5 |
Профили вырезаемых поверхностей на нефтехранилище при виде по нормали к поверхности: прямоугольник с максимальными размерами, мм×мм |
4000×3000 |
|
6 |
Расстояние кромки передней плоскости носителя от поверхности трубы, мм |
300–500 |
|
7 |
Начальное отклонение платформы носителя от плоскости горизонта по осям X, Y, град |
15 |
|
8 |
Расстояние среза сопла от поверхности резания, мм |
4–5 |
|
9 |
Точность стабилизации расстояния от поверхности, мм |
1 |
|
10 |
Отклонение линии реза от заданного профиля, мм |
2 |
|
11 |
Допустимая неперпендикулярность оси струи относительно поверхности резания, град |
5 |
|
12 |
Возможность обеспечения наклона оси струи относительно поверхности резания, град |
±30 |
|
13 |
Исходная непараллельность продольной оси носителя и трубы, град |
±10 |
|
14 |
Отклонение линии реза от заданного профиля, мм |
10 |
|
15 |
Флуктуации поверхности резания (минидеформации, загрязнение, сварной шов), мм |
2–5 |
Одно из условий выполнения технологического процесса гидрорезания состоит в постоянном обеспечении оси струи по нормали к обрабатываемой поверхности. В техническом плане для обеспечения перпендикулярности в точке резания и организации поисковых движений в режимах ориентации и согласования осей ТР и объекта резания [7] исполнительная система манипулятора должна иметь три управляемые координаты. Две из них – углы качания α, β относительно горизонтальных осей X, Y, третья – вращение относительно продольной оси.
Для выполнения поисковых движений и с целью стабилизации расположения струи по нормали к поверхности используем измерительную систему типа дифференциальной вилки [7]. В нашем случае измерительная система состоит из двух ультразвуковых датчиков, расположенных на штанге, перпендикулярной к продольной оси звена 4. Датчики расположены симметрично относительно центра штанги, ось которой совмещена с продольной осью струи. Особенностью этой измерительной системы является включение в ее состав объекта контроля – поверхности объекта резания (трубы).
Таким образом, манипулятор должен обладать шестью степенями подвижности (q1...q6). Упрощённая кинематическая схема ТР с обозначениями систем координат звеньев представлена на рис. 1.
Функционально кинематическую схему разделим на две системы – несущую (НС) и исполнительную (ИС) (рис. 2). На схеме обозначено: СЧ1–СЧ5 – силовые части звеньев манипулятора, включающие исполнительный двигатель, механическую передачу и конструкции плеч звеньев. Несущая система состоит из звеньев L1–L3, с соответствующими обобщенными координатами (угловыми) q1, q2, q3. Конечная точка звена 3 выполняет программное движение по эквидистанте фигуры резания. Исполнительная система представляет звено 4 с тремя степенями подвижности, обобщенные координаты (угловые) q4, q5 и q6. Это звено и соответствующая ему управляемая система координат обеспечивают ориентацию головки гидрореза, реализуя движение по нормали к поверхности резания.
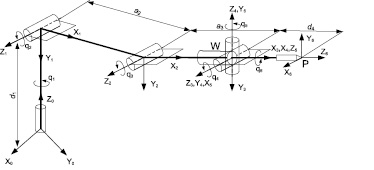
Рис. 1. Схематическое изображение манипулятора и его систем координат в сочленениях
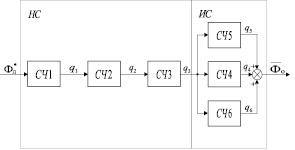
Рис. 2. Функциональная схема манипулятора
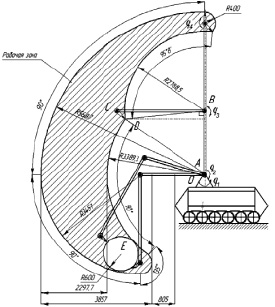
Рассмотрим геометрию взаимного расположения плеч робота и объекта резания (трубы) с целью определения рациональных размеров плеч и рабочих углов ТР для трех случаев – резание наземных и подземных нефтепроводов, а также нефтехранилищ.
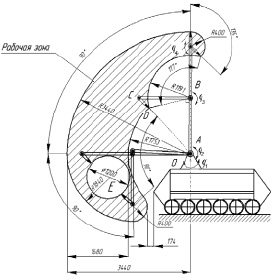
Случай 1. Резание наземных нефтепроводов
Рассматриваем резание труб наибольшего диаметра 1200 мм с вырезанием окружностей радиусом 330 мм, как наиболее характерного. Процесс рассматриваем в вертикальной плоскости, перпендикулярной продольной оси трубы. На рис. 3, а, б представлены расположения звеньев в варианте трехзвенника и четырехзвенника для двух наиболее характерных вариантов расположения точки начала резания. Проведенный геометрический анализ свидетельствует об избыточности применения кинематической цепи с четырьмя звеньями.
Следует отметить, что задача выбора размеров звеньев и рабочих углов для каждого из плеч ТР относительно их осей вращения в данном случае является непростой задачей. Здесь накладываются следующие ограничения:
– внутри рабочей зоны располагается недоступная зона с сечением в вертикальной плоскости вида окружность;
– расположение базовой поверхности, на которой располагается ТР, определяется конструкцией носителя (верхний уровень расположения и расстояния ТР от крайней точки носителя) и рельефом местности в зоне нефтепровода;
– величина расстояния носителя от объекта резания (трубы) обусловлена минимальным возможным расположением мобильного робота от любой преграды. Это значение принято в диапазоне 300–500 мм;
– одно из условий выполнения технологического процесса гидрорезания состоит в необходимости постоянного обеспечения оси струи по нормали к обрабатываемой поверхности.

а

б
Рис. 3. Расположение МТР и трубы нефтепровода
В аналитическом плане решение этой задачи имеет определенные трудности. Известные подходы [5–6] при этом весьма сложны. Наиболее простым подходом является графоаналитический анализ, исходя из которого и определялись основные геометрические характеристики звеньев кинематической цепи. На рис. 3 показаны наиболее рациональные размеры плеч. При графической оптимизации эти размеры варьировались в диапазоне ±50 %. Для реализации резания из любой из трех начальных точек принимаем большие значения линейных размеров плеч манипулятора: L13 = 1600 мм, L23 = 1440 мм, L33 = 200 мм. Параметр d на рисунках – расстояние между крайней точкой расположения носителя относительно объекта резания и образующей поверхности трубопровода. Высота платформы носителя, на которой расположен ТР, составляет 1250 мм, длина первого звена ТР – 400 мм).
Случай 2. Резание вскрытых подземных нефтепроводов в траншее
Расположение МРК и нефтепровода для двух характерных точек начала резания и, соответственно, расположения фигур резания приведены на рис. 4.
В этом случае необходимы разные длины плеч, отличные по размерам от случая резания трубы наземного нефтепровода: L13 = 2230 мм, L23 = 3057 мм, L33 = 200 мм. Второе плечо требуется большей длины, чем первое. Это противоречит классической компоновке манипуляторов рассматриваемой кинематики. Возможно использование телескопического исполнения этого звена. Однако это усложняет всю конструкцию и делает проблематичным реализацию здесь системы трубопроводов высокого давления, подводящих воду и абразив к соплу резания, расположенному в схвате манипулятора.
Случай 3. Резание нефтехранилищ
Вариант исполнения нефтехранилища: резервуар стальной вертикальный. Объектом резания является нефтехранилище в виде цилиндра с диаметром 7000 и 5000 мм высотой. При резании прямоугольных поверхностей с размерами относительно земной поверхности 4000×3000 мм приемлема кинематика и размеры плеч, определенные для варианта резки наземных нефтепроводов.
На основе проведенного анализа для варианта резания поверхностей в виде:
1) прямоугольников с размерами 600×800 мм и окружностей с диаметром до 800 мм на наземных трубопроводах с максимальным диаметром труб 1200–1600 мм;
2) прямоугольников с размерами до 4000×3000 мм на нефтехранилищах в виде цилиндра с диаметром 7000 мм и высотой 5000 мм могут быть рекомендованы геометрические параметры звеньев кинематической цепи технологического робота, приведенные в табл. 2.
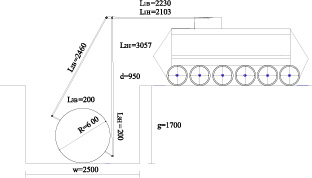
Рис. 4. Расположение МТР и трубы нефтепровода в траншее
Таблица 2
Геометрические параметры звеньев кинематической цепи технологического робота
|
Звено |
Длина плеча, мм |
Угол качания, относительно продольной оси предыдущего звена, град |
Примечание |
|
1 |
400 |
–90 ≤ q1 ≤ 90 |
Вращение относительно вертикальной оси |
|
2 |
1600 |
0 ≤ q2 ≤ 90 |
Исходное положение – горизонтальное |
|
3 |
800–1440 |
–90 ≤ q3 ≤ 0 |
Исходное положение – горизонтальное |
|
4 |
200–400 |
–135 ≤ q4 ≤ 135 |
Качение относительно оси X |
|
4 |
200–400 |
–30 ≤ q5 ≤ 30 |
Качение относительно оси Y |
|
4 |
200–400 |
–90 ≤ q6 ≤ 90 |
Вращение относительно продольной оси звена |
Для оценки пространственного расположения звеньев манипулятора в формате 3D осуществлено построение рабочих зон ТР в программном продукте SimMechanics. При построении рабочих зон манипулятор располагается в штатном режиме на платформе несущей транспортной системы. На рис. 5, а приведена рабочая зона комплекса «несущая система (транспортный робот) – технологический робот – объект резания» для варианта резки наземного нефтепровода с диаметром трубы 1200 мм. На рис. 5, б дана форма объема рабочей зоны в формате 3D.
Выбранные кинематика манипулятора и размеры звеньев обеспечивают выполнение технологического процесса резки нефтепроводов в виде труб с максимальным диаметром 1200 мм при расположении фигуры перпендикулярно продольной оси по максимальным размерам трубы в вертикальной и горизонтальной плоскостях. При резке прямоугольных сечений нефтехранилищ цилиндрической формы обеспечивается максимальная высота верхней линии резки 3000 мм с учетом высоты несущей платформы 1200 мм. Для вырезания прямоугольника с размерами 3000×4000 мм необходимо переустанавливать несущую платформу (мобильный робот) с шагом 1000 м.
На рис. 6, а, б приведены рабочая зона и форма объема рабочей зоны в формате 3D, при резке трубопроводов в траншее (вскрытые подземные трубопроводы). Здесь, как уже отмечалось выше, требуются другие размеры звеньев манипулятора.
Выводы
1. Создание универсального многоцелевого ТР для резки наземных, подземных и расположенных на воздушных эстакадах нефтепроводах нерационально, так как требует сложных кинематических схем и больших размеров звеньев.
а

б
Рис. 5: а – рабочая зона манипулятора технологического робота для резки наземных нефтепроводов; б – рабочая зона манипулятора технологического робота для резки наземных нефтепроводов в 3D
2. Рациональной кинематической схемой для технологического робота резки наземных и надземных нефтепроводов (трубопроводов) является трёхзвенник, работающий в ангулярной сферической системе координат, типа PUMA.
3. Для обеспечения нормали оси гидроабразивной струи к поверхности резания и компенсации не параллельности продольной оси трубы и продольной оси носителя исполнительная система манипулятора должна иметь две угловые координаты вращения относительно горизонтальных осей и дополнительную координату вращения относительной продольной оси звена с углом поворота ±90°.
4. Для контроля перпендикулярности продольной оси струи к технологической поверхности необходима информационно-измерительная система, состоящая из двух ультразвуковых датчиков, расположенных симметрично продольной оси струи и в совокупности с контролируемой поверхностью резания образующая измерительную систему типа дифференциальной вилки.

а
б
Рис. 6: а – рабочая зона в 3D технологического робота с транспортным средством для резки нефтепроводов в траншее; б – рабочая зона технологического робота с транспортным средством для резки нефтепроводов в траншее (вскрытые подземные нефтепроводы)
5. Анализ рабочих зон в формате 3D показал, что выбранная кинематика манипулятора ТР и размеры звеньев обеспечивают резание наземных трубопроводов и нефтехранилищ с заданными фигурами резания и их размерами. Для резания нефтепроводов, расположенных в траншее (вскрытые подземные нефтепроводы), следует увеличить размеры звеньев.
Библиографическая ссылка
Кобзев А.А., Махфуз А.А., Лекарева А.В. ОБОСНОВАНИЕ И ВЫБОР КИНЕМАТИЧЕСКОЙ СТРУКТУРЫ ТЕХНОЛОГИЧЕСКОГО МАНИПУЛЯТОРА ГИДРОРЕЗАНИЯ НЕФТЕПРОВОДОВ // Фундаментальные исследования. 2016. № 10-1. С. 53-61;URL: https://fundamental-research.ru/ru/article/view?id=40808 (дата обращения: 03.07.2026).