


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
FORMALISATION OF ALGORITHMS FOR FORMING NATIONAL COMPETITIVENESS WITHIN THE STRUCTURE OF PUBLIC ECONOMIC GOVERNANCE IN THE CONTEXT OF EXTERNAL DISTURBANCES

Введение
Современные национальные экономики функционируют в условиях высокой турбулентности внешней среды, характеризуемой политическими, технологическими и рыночными изменениями [1; 2]. Такие условия требуют от «динамически стабильных социально-экономических систем» [3] способности не только реагировать на внешние воздействия и уметь моделировать макроэкономические показатели [4], но и перестраивать внутренние механизмы функционирования – то есть проявлять свойства самоорганизации.
Традиционные модели управления экономикой, построенные на принципе централизованного директивного воздействия, оказываются недостаточно эффективными при высокой степени неопределенности и нестабильности [5]. Поэтому на первый план выходит системный подход, в рамках которого экономика рассматривается как сложная, саморазвивающаяся система, обладающая внутренними обратными связями и способностью к саморегуляции [6].
Одним из ключевых направлений анализа становится моделирование процессов самоорганизации, при которых экономическая система формирует новые цели и адаптирует собственную структуру к изменяющимся условиям среды. Такое моделирование возможно, например, в рамках концепции «цифрового двойника» социально-экономической системы какой-либо страны [7]. В рамках же данного исследования развивается идея о необходимости раздельного управления, при котором функции целеобразования и реализации управленческих воздействий выполняются различными подсистемами [8; 9].
В основе предложенного подхода лежит различение между управляющим органом (УО), обеспечивающим текущее функционирование и конкурентоспособность экономики и выработку управленческих команд, и корректирующим органом (КО), формирующим цели и контролирующим степень их достижения. Такая организация управления позволяет создать механизм внутренней самоорганизации – процесс, при котором система самостоятельно изменяет собственные параметры и алгоритмы функционирования для восстановления устойчивости после внешних возмущений.
Особое внимание уделено математическому описанию процесса. Вводятся векторные и матричные уравнения состояния системы, связывающие входные воздействия, внутренние параметры и выходные результаты. Эта формализация позволяет количественно анализировать устойчивость, адаптивность и способность системы к саморегуляции.
Предложенная модель «квадрата самоорганизации» описывает цепочку алгоритмов, обеспечивающих переход системы из одного состояния целеполагания в другое, в соответствии с изменениями внешних условий. Такой подход открывает возможности для проектирования адаптивных государственных структур, способных к целенаправленной трансформации.
Цель исследования – формализация процесса формирования национальной конкурентоспособности (самоорганизации) национальной экономики посредством разработки схемы раздельного управления и алгоритмов взаимодействия ее подсистем, обеспечивающих адаптацию и устойчивость к внешним возмущениям.
Материалы и методы исследования
Методологической основой исследования является системный подход к анализу экономических процессов. Использованы методы структурного моделирования, формализации алгоритмов управления, анализа устойчивости и теории адаптивных систем.
В качестве аналитического инструментария применяются матричные представления состояния системы, уравнения взаимодействия подсистем, а также моделирование процессов обратных связей.
Исследование базируется на концепциях теории систем и управления, теории самоорганизации и синергетики, теории конкурентных преимуществ [10; 11].
Практическая часть работы заключается в разработке схемы взаимодействия объекта управления, управляющего и корректирующего органов, а также алгоритмов их функционального поведения при внешних возмущениях.
Результаты исследования и их обсуждение
Продолжая анализ процесса самоорганизации национальной экономики [6], как системного механизма повышения ее конкурентоспособности в условиях динамических изменений внешней среды, в части условий, при которых система может поддерживать устойчивость и конкурентоспособность при внешних возмущениях, предлагается схема системы с раздельным управлением (рис. 1).
Отличительной особенностью социально-экономических систем является их свойство «осознанного» целеобразования.
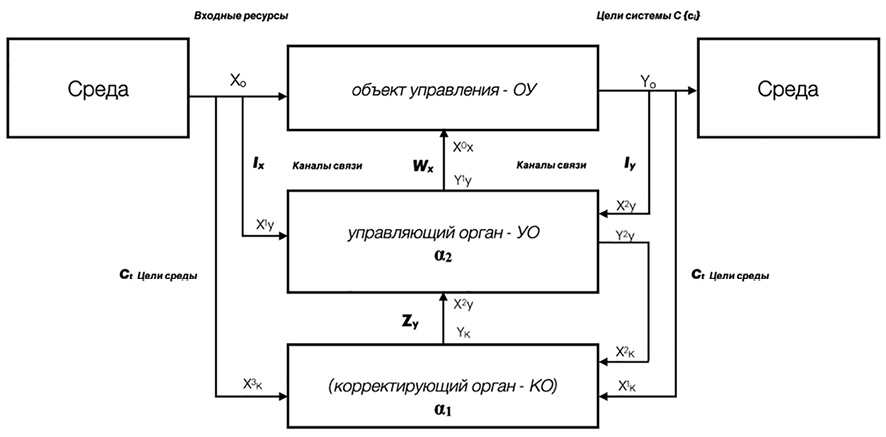
Рис. 1. Структурная схема системы с раздельным управлением (принципиальная схема самоорганизации экономической системы) Примечание: составлен автором по результатам данного исследования
Процесс целеобразования в экономической системе выступает при этом в качестве системообразующего начала: сначала формулируются цели, а потом создаются целереализующие объекты (элементы системы, организационная структура); то есть изменение целей функционирования системы может, в принципе, приводить к адекватному изменению ее внутренней структуры.
Сам по себе процесс управления, как организация целенаправленного воздействия на объект управления, в экономических системах реализуется, как отмечалось, на «осознанном уровне» [12; 13]: алгоритм управления может быть дезагрегирован на две стадии: 1) разработка целей управления и 2) выработка команд управления.
На стадии 1 определяется цель управления Z: алгоритм α1 синтеза цели управления Z по конечным целям системы Ct и состоянию ее входов X:
Z = α1(Ct, X). (1)
В данном случае цель управления Z иногда называют моделью желаемого на конец некоторого периода времени состояния элементов объекта YX, которое удовлетворяет условию достижения конечных целей Ct системы при состоянии X среды. В таких случаях можно говорить о том, что субъект отчуждает свои потребности и переводит их на язык состояния объекта:
Z : Y → YX. (2)
Данное положение позволяет, в принципе, осуществить разделение функции управления на две части: разработка целей управления (Z) может осуществляться одними элементами субъекта управления, а выработка собственно команд управления (WХ) – другими.
На стадии 2 по цели управления Z синтезируется команда WХ, где α2 – алгоритм управления, реализация которого обеспечивает определение управления (WХ), приводящего к достижению известной цели Z:
WX = α2(Z, X). (3)
В соответствии с принимаемой концепцией раздельного управления осуществляется структурное разделение субъекта управления на два элемента: управляющий орган (УО) и корректирующий орган (КО) (рис. 1).
Согласно этой схеме объект управления (ОУ), то есть другими словами – производственно-хозяйственный комплекс страны, подвергается внешним воздействиям среды XО, преобразуя их в выходную реакцию YО. Последовательность выходных реакций во времени характеризует поведение объекта (ОУ).
Предположим, что объект (ОУ) должен выполнять некоторую полезную функцию: например, обеспечение национального производства. Вместе с функцией цели задается, как правило, критерий эффективности, например, всемерное (максимально возможное) обеспечение уровня жизни населения страны, который доопределяет целевую установку («конечную» цель) системы.
Пусть объект управления (ОУ) обладает внутренней структурой, приспособленной к выполнению поставленной цели (С). Предположим также, что во внутренней структуре (ОУ) поддерживаются необходимые пропорции и никаких отклонений не возникает. Допустим также, что объект управления приспособлен к относительно стабильным внешним условиям, например к существующему порядку обеспечения страны требуемыми факторами производства, относительно комфортным условиям на мировых рынках, приемлемым политическим условиям и т. д. Тогда под действием XО будем понимать только возмущения, то есть отклонения от нормального состояния среды, в которой функционирует объект [14].
Управляющий орган (УО) информационно соединен с объектом управления (ОУ) каналом прямой связи со средой (IX) и обратной связью с объектом управления (IY). По этим связям управляющий орган через свои входы X0У и X1У получает информацию о состоянии среды и объекта управления:
 (4)
(4)
Управляющий орган на основании этой информации вырабатывает команду управления (W), являющуюся информацией о том, в какое положение должны быть приведены управляемые входы X0Х объекта.
X0Х → Y1Y (5)
При этом управление W можно представить, как результат работы алгоритма α2, где Z – целевые установки корректирующего органа (КО), выработанные в результате реализации им алгоритма (α1 ):
W = α2(I, Z). (6)
Корректирующий орган анализирует фактическое состояние объекта управления по выходу YО с точки зрения уровня достижения целей системы в целом Ct. Информация об этом поступает в корректирующий орган посредством его входа X1К. Через свой выход YК корректирующий орган передает команду Z о целях управления на вход X2У управляющего органа [15].
В частном случае, когда Ct = const, управление посредством алгоритма α2 является режимом адаптации системы.
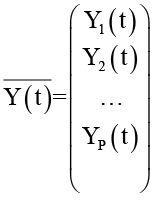
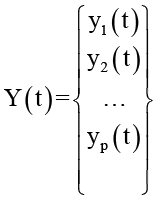
Состояние выходов системы во времени представим в виде многомерного вектора Y(t), где Y(t) – вектор выхода экономической системы размерности Р, который содержит параметры (показатели) состояния объекта, доступные для наблюдения:
 . (7)
. (7)
Здесь важно отметить, что для большинства реальных экономических объектов задается некоторое допустимое отклонение параметров состояния их выходов, которые представлены многомерным вектором YО.
Состояние выходного вектора YО объекта управления (ОУ), при котором его функционирование можно считать оптимальным относительно целей C, называют «целевым» состоянием; обозначим его как YОпл. Тогда текущее состояние (состояние во времени относительно Ct) определяется как «фактическое» состояние; обозначим его как YОф.
Поскольку процесс движения объекта носит вероятностный характер, то в общем случае всегда будет иметь место отклонение вектора фактического состояния от целевого:
Y(t) = YОф – YОпл, (8)
Cостояние объекта управления может считаться, в первом приближении, оптимальным, если вектор E не выходит за пределы области допустимых значений:
0 ≤ Ē < ΔE. (9)
В этой области объект управления (ОУ) функционирует как обычная самоподстраивающаяся (адаптивная) система с отрицательной обратной связью. При этом структура (S) и способы действия (A) как объекта, так и субъекта управления остаются неизменными.
Возможны случаи, когда с течением времени вектор состояния выхода YОф системы будет выходить за пределы области допустимых отклонений (формула (8)).
Здесь выделяются различные причины возникновения таких ситуаций:
1) отклонения в силу возникновения внутренних противоречий – нарушение сбалансированности целей системы и средств их реализации;
2) отклонения возникают при изменении внешних, «конечных», целей системы (C).
В таких случаях (ситуация 2) существующая структурная организация объекта управления (ОУ) и управляющего органа (УО) не позволяет посредством алгоритма α2 вырабатывать оптимальное управление Wx. Тогда управляющий орган должен выработать, сообразно с изменением условий функционирования, новые способы движения экономической системы, как для объекта управления (ОУ), так и для самого себя (УО).
Такого рода развитие экономической системы имеет место тогда, когда структура (ОУ) содержит обратные связи, действующие в качестве средств самоорганизующего управления, то есть (УО) наделяется способностью изменять свой закон движения путем соответствующего изменения способов действия (А) элементов структуры и изменения самой структуры (S) субъекта управления.
В этом смысле алгоритм (α1) корректирующего органа (КО) приобретает сложное построение. В первоначальном смысле его назначение сохраняется в соответствии с формулой (3), но только уже для новых целей системы, то есть для Ct +1:
 . (10)
. (10)
Однако существующая организация (УО), призванная реализовывать алгоритм α2, уже не в состоянии выработать оптимальное управление W по новым целям, то есть
 , (11)
, (11)
так как алгоритм αZ «настроен» на цели управления Zt .
В связи с этим обстоятельством алгоритм α1 представляется состоящим из двух частей: α11 – в значении формулы 1 и α21 – как алгоритм выработки целей самоорганизации ZS.
Смысл алгоритма α21 сводится к выработке требований к структуре и способам действия управляющего органа и объекта управления в новых условиях состояния среды (в условиях Сt+1). Тогда общий алгоритм синтеза команды управления W может быть задан схемой, представленной на рис. 2 («квадрат самоорганизации»).
«Квадрат самоорганизации» – это схема, которая демонстрирует, как при изменении целей системы (переход в состояние Сt+1 ) реализуется алгоритм α11, результатом которого является формирование целей управления Z в новых условиях состояния среды.
Для реорганизации внутренней структуры и способов действия управляющего органа адекватно целям управления (Z) осуществляется параллельная цепочка процесса самоорганизации:
 (12)
(12)
Алгоритм α21 предназначен для выбора целей Zs реорганизации (УО) и (ОУ); α31 – алгоритм выработки управляющих команд Ws для структурной реорганизации (ОУ) и (УО); α32 – алгоритм внедрения проекта Ws структурной реорганизации (ОУ) и (УО). Тогда, посредством алгоритма α2 появляется возможность выработать команды управления W, отвечающие требованиям новых целей Z управления согласно формуле (3).
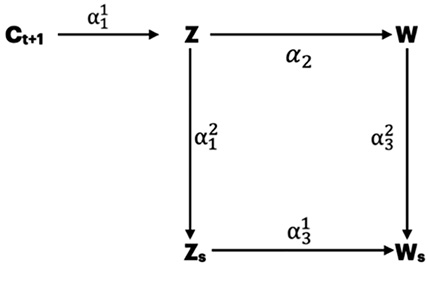
Рис. 2. Принципиальная схема раздельного управления системой в режиме самоорганизации («квадрат самоорганизации») Примечание: составлен автором по результатам данного исследования
Цепочка алгоритмов самоорганизации (формула (12)) реализуется корректирующим органом (КО) системы, не принимающим непосредственного управления объектом (ОУ) в кибернетическом смысле понятия управления.
«Квадрат самоорганизации» заключает в себе две важные возможности:
1) позволяет формализовать процедуру самоорганизации экономической системы, что предоставляет в дальнейшем возможность детерминировать схему включения процедуры самоорганизации;
2) выявляет схему раздельного управления, что позволяет практически спроектировать организационную структуру государственного управления, способную изменять себя сообразно с возмущениями мегасреды.
С точки зрения первой возможности рассмотрим анализ процедуры самоорганизации на гипотетическом примере функционального поведения корректирующего органа (КО) по состоянию выходного вектора YОф (t) объекта управления в смысле формул (8) и (9).
Режим адаптации системы предполагает выполнение условия 8. Если с течением времени вектор состояния выходов YОф объекта управления оказывается за пределами области ∆E и эти отклонения настолько велики, что существующая внутренняя организация (ОУ) не в состоянии минимизировать вектор E, включается схема корректировки (12). Этот процесс продолжается до тех пор, пока условие (9) не будет выполнено.
Эта процедура направлена на минимизацию вектора E, то есть, когда вектор E достигает своего граничного значения ∆E, процедура самоорганизации считается законченной.
Если система вновь попадает в такую же ситуацию, то ее орган управления (УО) уже не будет претерпевать реорганизации структуры, поскольку на предыдущем шаге самоорганизации произошел акт «обучения» управляющего органа в виде «освоения» им новых способов действия и осуществления адаптации (трансформации) структуры (ОУ) в соответствии с новыми условиями функционирования.
Не исключена возможность, что функция E(t) по истечении времени когда-либо превысит свое значение Es(t), при котором произошел предыдущий шаг самоорганизации; тогда этот процесс должен повториться. Иначе говоря, процесс самоорганизации экономической системы не ограничен во времени.
С точки зрения второй возможности процедуры самоорганизации (см. выше – ситуация 2) представляется возможность рассмотрения структурной схемы взаимодействия подсистем (ОУ) и (УО) с раздельным управлением экономической системы при ее самоорганизации (рис. 1). Для этого воспользуемся понятием системного представления структуры S элементов и их взаимосвязей для подсистем ОУ, УО и КО.
Предварительно отметим, что динамику взаимодействия отдельных подсистем в большой экономической системе и воздействия на нее со стороны внешней среды можно задать в виде матрицы [S] состояния системы. Эта матрица задает способы преобразования входных векторов (показателей) состояния системы в ее выходные векторы (показатели) состояния (в смысле формулы (7)). Но в реальных экономических системах многие компоненты указанных векторов не могут быть измерены с помощью статистических наблюдений. В таких случаях ситуацию разрешает введение дополнительного уравнения выходов в подсистемах экономической системы, которое определяет те показатели, которые доступны для наблюдения:
Y(t) = SX(s), (13)
где Y(t) – вектор выхода размерности (p), который содержит переменные параметры управляемого объекта:
 . (14)
. (14)
S – матрица состояния параметров объекта размерности (pxn), в управляемых системах p ≤ n:
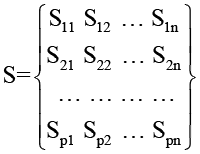 . (15)
. (15)
Здесь динамика взаимодействия отдельных подсистем в экономической системе и воздействия на нее со стороны внешней среды задается в виде матрицы [S] состояния системы. Эта матрица задает способы преобразования входных показателей системы в выходные.
Практически орган управления (УО) и корректирующий орган (КО) объединяются в рамках подсистемы (субъекта) управления экономической системой, однако для наглядности процедуры самоорганизации они рассматриваются как две действующие системы. В этом случае сеть связей в экономической системе (рис. 1) можно представить в виде векторных равенств:
 (16)
(16)
 , (17)
, (17)
 , (18)
, (18)
 , (19)
, (19)
 , (20)
, (20)
где (16) выражает связь объекта управления с управляющим органом; (17) – связь объекта управления с корректирующим органом; (18) – связь корректирующего органа с управляющим органом; (19) – связь управляющего органа с объектом управления; (20) – связь управляющего органа с корректирующим органом.
Здесь Soy , Sok , Sky , Syo , Syk – матрицы связей элементов соответствующих подсистем (связь в последовательности индексов); Yo , Yk , Y1y , Y2y – сложные векторы состояния входов и выходов этих же подсистем [8, с. 71].
Нетрудно видеть, что выходной вектор состояния Yo объекта управления (ОУ) может изменяться под воздействием команд управления W, выработанных управляющим органом:
 (21)
(21)
которые, в свою очередь, являются зависимыми от состояния входов управляющего органа:
 (22)
(22)
В процессе самоорганизации корректирующий орган осуществляет обратное воздействие на управляющий орган через его вход X2У:
 (23)
(23)
Тогда преобразование
 (24)
(24)
выражает в общем виде внутренний закон самоорганизующейся экономической системы. Здесь формулы (21)–(24) содержат обозначения Аo, Аy, Аk – матриц способов (алгоритмов) действия, соответственно, подсистем ОУ, УО, КО в экономической системе [15, с. 10].
Следует отметить, что взаимодействие между отдельными смежными подсистемами (ОУ, УО, КО) в анализируемой системе осуществляется путем согласования их выходов (Y) и входов (X) соответственно, что в матричной форме может быть представлено следующим образом:
 (25)
(25)
где S – структурная матрица анализируемой системы; Soo, Syy, Skk – ноль-единичные подматрицы связей элементов в внутри соответствующих подсистем; Soy, Sok , Syo, Sky – матрицы связей между элементами в отдельных подсистемах (ОУ, УО, КО соответственно).
Структурный закон самоорганизации (формула (24)) определяет, таким образом, существенные объективные связи между состоянием выходов экономической системы (в рамках данного исследования – национальной экономики), идентифицированных со степенью (уровнем) достижения ее целей, и структурными параметрами органа управления: способами действия – функциями управления < F > и составом и схемой связей его элементов – организационной структуры < S > [8, с. 71].
Заключение
В результате проведенного анализа разработана теоретическая модель самоорганизующейся национальной экономики, основанная на принципе раздельного управления. Показано, что устойчивость и конкурентоспособность системы зависят от способности ее управляющего механизма формировать и реализовывать новые цели, адекватные изменяющимся внешним условиям.
Ключевым элементом предложенного подхода является «квадрат самоорганизации», отражающий цепочку алгоритмов, через которые система переходит к новому состоянию равновесия. Этот механизм включает как адаптационные процессы, так и структурную перестройку органов управления.
Разделение функций между управляющим и корректирующим органами позволяет выстроить более гибкую архитектуру управления, где корректирующий элемент выполняет роль стратегического анализатора, обеспечивая целеобразование, а управляющий орган реализует оперативное регулирование. Такая система способна к «обучению» и накоплению управленческого опыта, что, по сути, и является проявлением самоорганизации.
Построенная формальная модель с использованием матричных уравнений состояния демонстрирует возможность количественного описания взаимосвязей между структурой, функциями управления и результатами функционирования экономики. Таким образом, исследование закладывает основы адаптивной парадигмы управления, в которой управленческие структуры не только реагируют на изменения среды, но и преобразуются в ответ на них, поддерживая конкурентоспособность национальной экономики.
Важно отметить, что предложенная формализованная схема носит инвариантный характер и может применяться к различным типам национальных экономик. Различия между ними проявляются не в структуре самой модели раздельного управления, а в параметрах и конфигурациях ее подсистем. Например, для экономики США, во всяком случае до недавнего времени, в большей степени характерна децентрализованная структура корректирующего органа и высокая роль рыночных сигналов, в то время как для России – гораздо более высокая степень централизации целеобразования и довольно инерционная структурная реорганизация.
В модели это отражается, например, через различия: в матрицах связей S (централизация – децентрализация); коэффициентах алгоритмов управления α (скорость реакции государственных органов, жесткость планирования и др.); в параметрах допустимых отклонений E (срабатывания самоорганизации и структурной перестройки системы).
Кроме того, в качестве одного из направлений дальнейших исследований может быть разработана методика расчета «индекса самоорганизации» экономической системы, который мог бы включать: частоту и глубину структурных изменений в органах управления; скорость реакции на внешние шоки; степень отклонения фактических показателей от целевых и др.
Например, для практического применения модели может быть введен показатель отклонения фактического состояния экономики от целевого: E(t) = YФ(t) – Yпл(t), где Y – агрегированный вектор макроэкономических показателей экономической системы. В качестве компонентов Y могут использоваться такие показатели, как темп роста ВВП, инвестиции в основной капитал, производительность труда, устойчивость внешней торговли и др. Превышение допустимого порога ΔE может рассматриваться как сигнал запуска процедуры самоорганизации системы управления.
Таким образом, предложенная модель открывает возможности для эмпирической верификации и адаптации к конкретным национальным условиям при проведении реформирования систем государственного управления, проектировании адаптивных экономических институтов и стратегическом прогнозировании развития национальной экономики. Более того, в рамках практического использования модели могут проводиться калибровки параметров самоорганизации для различных типов экономик, что в дальнейшем позволит перейти к инструментальной платформе мониторинга конкурентоспособности и устойчивости национальной экономики.
Conflict of interest
Financing
Библиографическая ссылка
Мезинова И.А. ФОРМАЛИЗАЦИЯ АЛГОРИТМОВ ФОРМИРОВАНИЯ НАЦИОНАЛЬНОЙ КОНКУРЕНТОСПОСОБНОСТИ В СТРУКТУРЕ ГОСУДАРСТВЕННОГО УПРАВЛЕНИЯ ЭКОНОМИКОЙ В УСЛОВИЯХ ВНЕШНИХ ВОЗМУЩЕНИЙ // Фундаментальные исследования. 2026. № 2. С. 25-32;URL: https://fundamental-research.ru/en/article/view?id=43977 (дата обращения: 15.07.2026).
DOI: https://doi.org/10.17513/fr.43977