


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
TO THE THEORY OF FLEXIBLE ADAPTATION OF ECONOMIC SYSTEMS THROUGH ROBUST CONTROL

Особенность современной глобальной экономической ситуации проявляется в быстрой утере компаниями имеющихся конкурентных преимуществ. Все это усиливает востребованность адаптации экономических систем к окружающей действительности, наполненной неопределенностью и включающей в себя элементы хаоса. Хаос окружающей (деловой) полисубъектной среды инициируют ее субъекты, порождая информационную и поведенческую неопределенность. В этих условиях возникает необходимость постоянной адаптации экономических систем к сложной реальности как образа её повседневной деятельности. Выведенная практикой подобная необходимость требует нового подхода к модели управления экономическими системами, которая способна выступать в роли активного регулятора её перестроения с одного «плавающего равновесия» (временного аттрактора) на другое. Модель управления, отвечающая современным вызовам полисубъектной среды, представлена моделью робастного управления, элементами которой являются адаптивный и робастный гомеостазы, формирующие робастный предел, определенный для каждого параметра. Механизм робастного управления выступает как регулятор «плавающего равновесия» и гибкого его замещения под влиянием внешних и внутренних дестабилизирующих факторов.
Цель исследования: расширить и оцифровать пространство вероятностного изменения экзогенных параметров построением адаптивного гомеостаза и в дальнейшем создать некоторую нейронную сеть фреймов с выработанными решениями, выступающую как плацдарм для сборки «плавающих равновесий», обеспечивающих адаптацию экономической системы без разрушения робастного гомеостаза.
Материалы и методы исследования
Материалы статьи представляют результаты развития исследований по гибкой адаптации экономических систем посредством робастного управления, которые инициированы авторами статьи и изложены в ряде публикаций в настоящий период. Создание теории робастного управления и гибкой адаптации экономических систем основано на преемственности научных законов, принципов и аксиом теории эволюции и самоорганизующихся систем, теории сложности и неопределенности, робастного управления техническими системами. Доказательность результатов исследований основана на методах научного познания: аналогии, типологии, структурировании и конвергенции знаний.
Результаты исследования и их обсуждение
Обоснованы принципы адаптации открытых сложных систем, к классу которых относятся экономические системы; выстроена взаимосвязь между видами флуктуаций и структурными образованиями (объект, среда, ситуация); разработан образ модели механизма робастного управления с элементами: адаптивный гомеостаз, нейронная сеть фреймов знаний по стратегии, тактике, оперативному управлению и робастный гомеостаз.
От общенаучных аспектов адаптации биосистем к принципам адаптации экономических систем
Адаптация, согласно законам эволюционного развития, относится к одному из универсальных свойств систем разного класса, позволяющим им входить в некоторое устойчивое состояние, обеспечивающее жизнеспособность [1]. Фундаментальное положение, сформулированное академиком Н.Н. Моисеевым об аналогии организма и организации, а также о соразмерности их сложности дает основание обратиться к базовым свойствам адаптации биосистем. В теории эволюции под адаптацией понимается «достигнутый результат совершившегося развития, который можно определить как ансамбль свойств целого (обычно организм, но и применительно к сложным, саморегулирующимся и самоорганизующимся системам), обеспечивающих его устойчивое существование и воспроизведение, т.е. более или менее длительное сохранение ансамбля существенных параметров этого целого» [1]. Достижение результата «совершившегося события» осуществляется посредством механизма адаптации.
Механизм адаптации, на наш взгляд, представляет собой процесс трансформации информации в поведение, обеспечивающий устойчивое существование и воспроизведение системы. Относительно выделенных в [2, с. 88–89], классов информации: генетической, поведенческой и логической – определим виды адаптационных механизмов. Адаптация, основанная на генетической информации – генетическая адаптация, механизм формирования совокупности генов живой клетки, регулирующих ее устойчивое существование и воспроизведение. При генетической адаптации информация непосредственно трансформируется в поведение. Поведенческая адаптация основывается на информации, лежащей «в основе поступков, контролируемых особенностями нервной системы, которые формируются временно, под влиянием жизненного опыта или процессов научения, например, путем подражания родителям или другим сородичам». При поведенческой адаптации трансформация информации в поведение опосредуется формированием некоторых алгоритмов действия. Логическая адаптация, присущая исключительно человеку, базируется на всей совокупности технологических приемов и процессов, существующих вне зависимости от желания и воли отдельных индивидуумов. В логической адаптации интегратором действий по формированию алгоритмов принятия решений выступает целеполагание. Отметим, что обратный механизм трансформации поведения в логическую информацию – координация.
С позиции развития теории адаптации экономических субъектов вновь обратимся к законам эволюции, утверждающим, что способность системы к адаптации имеет «естественный предел». Подобное ограничение является совместным теоретическим основанием, согласующимся с моделью приспособления Ч. Дарвина. Из представлений Ч. Дарвина возьмем на вооружение положение: «Пределы адаптации ограничены некоторыми пороговыми значениями» [Цит. из 1]. Из этого следует, что цель адаптационных действий состоит в том, чтобы не выходить за границы предела на основе порогового реагирования. Между тем принципиальным положением, определяющим развитие системы, является то, что «пределы адаптивного реагирования поддаются разрушению под воздействием дестабилизирующих факторов с изменением при этом адаптивной нормы» [1]. Под нормой адаптации в теории систем «человек – техника – среда» [3] «понимается полезная приспособительная реакция организма в рамках его возможностей». Чем шире норма реакции, тем выше адаптационный потенциал организма и норма адаптивности.
Следующим важным аспектом для определения механизмов адаптационного управления является утверждение, заключающееся в том, что адаптация системы происходит посредством некоторой смены траекторий её функционирования без нарушения пороговых значений предела, заданного внешней и внутренней средой. В рамках предела адаптационные решения должны выводить систему на определенную траекторию «плавающего равновесия» как на некоторый временной аттрактор. Этим законом эволюции объясняется гибкость адаптации системы к действию дестабилизирующих факторов без потери её жизнеспособности.
Приведенные фундаментальные положения естественнонаучной теории эволюции об адаптации систем разной природы служат основой для выстраивания теории адаптации экономических систем. Так, исследованиями М. Рейнора по изучению приспособляемости мирового уровня компаний (Microsoft, Apple) подтверждаются параметры модели приспособленности сложных систем: «адаптивная способность имеет свои пределы», «пределы поддаются разрушению действием обратной положительной связи», а «история успеха компаний говорит о достоинствах адаптации» [4, с. 96, 97]. В то же время М. Рейнор отмечает, что в ряде специальных работ выявлено, что только небольшое количество компаний способны адаптироваться к изменениям среды таким способом, который позволяет им создавать ценность в течение достаточно долгого периода времени. Указанные выше исследования дополнительно подтверждают востребованность развития теории организационной адаптации.
Принимая за основу приведенные фундаментальные положения естественнонаучной теории эволюции, факты подтверждения их согласованности и преемственности к условиям управления экономическими системами в динамически изменяющейся среде, формулируем шесть исходных принципов развития теории гибкой адаптации экономических систем посредством робастного управления:
– адаптация осуществима в рамках некоторого оцифрованного робастного гомеостаза, в котором каждый параметр ограничен робастным пределом возможных действий для создания робастной устойчивости;
– адаптационные действия рассматриваются как пороговое реагирование в рамках робастного предела по каждому параметру порядка на изменения, генерируемые внешней и внутренней средой;
– механизм робастного управления заключается в трансформации состояний системы «ансамблем существенных параметров» на входе в систему, представляемых переменными величинами, составляющими адаптивный гомеостаз;
– цель адаптации – достижение значений, обеспечивающих соответствие выходных показателей эффективности функционирования системы значениям, заданным робастным пределом;
– адаптационные решения выводят систему в рамках робастного предела на траекторию «плавающего равновесия», т.е. на некоторый временной аттрактор её функционирования и развития;
– пределы адаптивного реагирования поддаются разрушению под воздействием дестабилизирующих факторов, привносимых хаосом и неопределенностью, носителем которых является окружающая систему полисубъектная среда, объект и деловая ситуация, с изменением при этом адаптивной нормы.
Современное представление экономических систем как сложных открытых систем и условий их функционирования в окружающей среде, наполненной хаосом и неопределенностью, как показал анализ публикаций, настраивает мир управления на новую парадигму управления. Содержание парадигмы выводим из ключевых положений, развиваемых в работах И. Пригожина и И. Стенгерс [5], Д. Норта [6], М. Рубинштейна и А. Фирстенберга [7].
Общность в направлении развития управления экономическими системами, представленная работами [5–7], позволяет использовать в настоящем исследовании научную гипотезу М. Рубинштейна и А. Фирстенберга [7, c. 37]: «система находится в состоянии порядка на грани хаоса (on the edge of chaos) и мера устойчивости постоянства неразрывно связана с гибкой адаптацией». В [2, 8, 9] предлагается для устойчивого существования и развития экономической системы, действующей на грани порядка и хаоса, введение робастного управления, механизм которого образуется на основе изложенных принципов адаптации – порогового реагирования на действие дестабилизирующих факторов в рамках робастного гомеостаза, с выстраиванием «плавающего равновесия» как временного аттрактора действия системы.
Соединением в одну концептуальную структуру ключевых положений из теории и практики управления экономическими системами на грани порядка и хаоса, развиваемых в вышеприведенных научных трудах [5–7], и методологических и теоретических разработок по развитию робастного управления экономическими системами, изложенными в [2, 8, 9], выстраивается новая парадигма, направленная на активное следование общенаучным принципам адаптации в управлении экономическими системами. Содержание парадигмы: робастная устойчивость системы, функционирующей на грани порядка и хаоса, обеспечивается гибкой адаптацией, выражающейся в создании специального регулятора. При этом адаптивные управляющие действия состоят в пороговом реагировании на флуктуации разного порядка, генерируемые средой, объектом и ситуацией, с образованием временных аттракторов – «плавающего равновесия» системы в контурах робастного предела.
Далее, обобщим результаты исследований, изложенных в научных публикациях, с позиции развития подходов к исследованию адаптации и к разработке её механизма в приложении к экономическим объектам, которые формируют определенный базис теории их адаптации. Сделаем акцент на том, в какой мере сформулированные ранее научные логические построения согласуются с выведенными принципами адаптации экономических субъектов и встраиваются в сформулированную парадигму обеспечения их робастной устойчивости.
Обзор многочисленных публикаций, в том числе В.А. Долятовского. и его соавторов [10], В.М. Ячменевой [11], С.Н. Глаголева [12], М.В. Гречко [13] позволяют выделить основные структуры знаний по теории адаптации:
1) цель адаптации (принятая по всем публикациям) – выход системы посредством адаптации на равновесное состояние;
2) отождествлена общность между биосистемой и организацией в части их сложности; предложена концепция разработки механизма адаптационного управления, которая «лежит на пути синтеза современных автоматизированных технологий управления экономическими объектами [10, с. 102–103];
3) выделены сходства и различия между понятиями «адаптация» и «адаптивность»; систематизированы способы, обеспечивающие адаптацию системы к внутренним (обеспечивающие факторы) и внешним резервам (поддерживающие факторы); введены понятия: «уровень глубины адаптивности», «маневрирование стратегическими и оперативными планами» [11, 12];
4) в роли механизма адаптации рассмотрена адаптационная модель системы управления, элементами которой являются адаптационные модели её функциональных подсистем и дана систематизация факторов, разрушающих равновесное состояние системы, генерируемых внешней и внутренней средой [12];
5) сформулировано положение о том, что качественное изменение в управлении экономическими системами должно происходить по следующему сценарию: «от концепции равновесия и убывающей отдачи приходится отказываться и рассматривать новую теорию, связанную с неравновесными состояниями и инновационными процессами в экономике» [13].
Из приведенных положений следует, что такие категории, как «робастный предел», «пороговое реагирование» для выхода системы на «плавающее равновесие», робастный гомеостаз как потенциал адаптивности экономической системы, авторами приведенных выше публикаций не приняты во внимание и, естественно, не рассмотрены с позиции методологии робастного управления. В ином представлении в работе М.А. Алексеева и Н.К. Улановой [14] исследована роль адаптационных механизмов в обеспечении экономической безопасности организации. Установлена взаимосвязь между неопределенностью и использованием адаптационного механизма при принятии управленческих решений. В указанной статье авторам не удалось осуществить аналитический переход от качественных факторов, характеризующих адаптационную устойчивость, к количественным оценкам, позволяющим оценивать реальные совокупности. Возможным препятствием выступили используемые теоретические предпосылки, не позволяющие выделить факторы устойчивой статистической связи между исследуемым явлением с объектами наблюдения. Тем не менее воспользуемся признаками, обобщенными в указанной работе, позволяющими выделить факторы, приводящие к «неэффективным последствиям адаптационных решений». Представим их с позиций требований к гибкой адаптации экономических систем в контексте робастного управления. Определим, что при разработке механизма гибкой адаптации необходимо:
– сократить временной лаг на принятие адаптивных решений, чтобы в наибольшей мере предотвратить их несоответствие сложившимся экономическим условиям;
– ослабить зависимость адаптационных решений от наблюдаемой в прошлом траектории изменения экономической среды через ориентацию на будущее;
– усилить оценку принимаемых адаптационных решений не с позиции соответствия глобальному оптимуму, а исходя из выбора лучшей из альтернатив, значения результатов действий которой не выходят за пределы выстроенного робастного гомеостаза;
– исключить информационные ограничения при принятии адаптационных решений;
– создать накопители и преобразователи информации в структуры знаний или фреймы;
– исключить разрыв между дискретностью адаптации системы и непрерывностью в подготовке альтернатив адаптационных решений.
Потенциальное знание для развития теории адаптации экономических систем на основе сформулированных принципов заложено в моделях управления операционными процессами. Примером графического отображения модели адаптации с пороговым реагированием являются контрольные карты качества V. Shewhart (1924 г.). Следование приведенным принципам адаптации находим в известной модели Мюллера – Ора, описывающей процесс управления денежными средствами как случайным потоком (Vt), управление которым подчиняется принципу порогового реагирования с возвращением на установленный простейший аттрактор, называемой в модели «точкой возврата» (рис. 1).
В заключение отметим, что научный мир управления пришел к выводу, что «выживание и развития экономических систем происходит в условиях, когда хаос и неопределенность является действительностью, а необходимость постоянной адаптации к сложной реальности – образом её повседневной деятельности» [7, с. 108].
Неопределенность как фактор, инициирующий развитие механизма гибкой адаптации экономической системы
Экономическая система – сложная, динамическая, вероятностная и диффузная система с многомерным результатом функционирования, взаимодействующая с субъектами деловой среды, поведение которых отличается высокой мерой неопределенности. Как отмечалось выше, противодействие неопределенности является ключевым отличительным элементом логической адаптации.

Рис. 1. Модель Миллера – Орра по адаптивному оперативному управлению движением денежных средств
Отнесем к методологическим конструктам теории неопределенности её базовые типы: объективная неопределенность и субъективная неопределенность. Авторами статьи в [15] к носителям объективной неопределенности отнесены: объект – экономическая система, внешняя среда и её структурная единица – деловая ситуация. Из этого вытекают такие типы объективной неопределенности: объектная, средовая и ситуационная, уровнем познания которых определяется субъективная неопределенность. В «субъектно-объектном контексте» объект заменяется «субъектом-исследователем». Знания об объекте и его развитии передаются посредством восприятия субъектом изучаемой реальности. «Субъективность наблюдателя определяет его модель наблюдения, его теорию, под оправдание которой отбираются убедительные факты» [16, с. 34].
Рассмотрим природу каждого из типов неопределенности, с определенной мерой воздействия на устойчивость и эффективность функционирования экономической системы.
Объектная неопределенность, носителем которой является внутреннее устройство системы, проявляется посредством параметрической и частотной неопределенности. Причинность параметрической неопределенности в стохастической природе операционных процессов, в «дефектах» принимаемых решений, в объективном свойстве технических объектов, проявляющемся «отказами» с потерей работоспособного состояния, в диффузии информационных потоков, в недостаточности и недостоверности данных, составляющих их, и нелинейных связях между видами деятельности системы управления. Параметрическая неопределенность усложняется частотной неопределенностью, под которой будем понимать частоту дискретных изменений состояний системы (Sti) в некоторый период T = t1,...,tn, происходящих под воздействием дестабилизирующих внутренних и внешних факторов.
Внутренние возмущения и внешние воздействия вызывают флуктуацию параметров системы от заданной равновесной траектории её существования и развития. В теории синергетики различают тройственную роль флуктуации, раскрывающей сущность и меру влияния на устойчивое функционирование системы [17]. Представляемые в ней порядки флуктуаций создают основополагающее знание об этом случайном, но объективном явлении.
1. Флуктуации могут проявляться как некоторое уравновешенное колебание (мерцание), не вносящее в систему заметных отклонений. Единичная крупная флуктуация, если она не превысила некоторого порогового значения, гасится «спокойной» работой остальных элементов системы. Флуктуации описанного характера отнесем к «флуктуациям первого порядка». Естественно считать, что они являются объективным явлением для любой действующей системы.
2. Флуктуации могут играть роль «зародыша нового состояния», особенно она существенна, если превышена некоторая пороговая величина, определяющая устойчивость системы. Тогда воздействие отдельной флуктуации способно «раскачать» систему и «свергнуть ее из существующего состояния». Описанные флуктуации будем относить к флуктуациям «второго порядка».
3. Флуктуация может играть роль спускового крючка или «последней капли», когда в системе, уже достигшей высокой степени неравновесности и нестабильности, потенциально готовой к скачку, он мгновенно инициируется возникшим возмущением. Это явление называют феноменом «самоорганизованной критичности», которое и во внешней среде порождает хаос с высокой мерой неопределенности.
Флуктуации второго и третьего порядка есть основание рассматривать как явление «разрастающихся флуктуаций» понятие, введенное теорией синергетики, не только в системе, но и во внешней среде, что порождает хаос с высокой мерой неопределенности. Разрастающиеся флуктуации подталкивают систему к переходу на «блуждающие траектории развития», на некоторые временные аттракторы, в ряде случаев и к бифуркации.
При проявлении флуктуации первого порядка под устойчивостью понимается «способность системы пассивно сохранять (статическая устойчивость) и/или активно восстанавливать (динамическая, или регуляторная устойчивость) свои существенные параметры в случае малых (не слишком сильных) нарушений» [1]. Устойчивость функционирования экономической системы рассматривается с позиции её способности оказывать противостояние малым внутренним возмущениям и внешним воздействиям, нарушающим её структуру, установившийся режим и траекторию движения или развития относительно ранее избранной. О степени нарушенности в действиях системы судят по установленному пределу (по А.М. Ляпунову) допустимых (малых) флуктуаций. Тогда считается, что система обладает устойчивостью, если малые отклонения (флуктуации первого порядка) не превышают граней установленного предела.
В теории управления экономическими системами преобладает традиционная направленность в создании их устойчивости – это противостояния малым отклонениям, а именно флуктуациям первого порядка. В действительности управление экономической системой ведется в среде «разрастающихся флуктуаций», трансформирующихся в турбулентные совокупности, сопровождающиеся синтезом объектной со средовой и ситуационной неопределенностью.
Средовая неопределенность определяется свойствами информационного пространства окружающей среды экономической системы: детерминированным и стохастическим хаосом. «Хаос» вызывается разного характера «информационными выбросами» со стороны субъектов деловой среды, определяемыми как турбулентные всплески, длительность которых случайна. Управление в полисубъектной среде, представляемой «хаосом», требует определенной её упорядоченности, что удается получить на основе группирования элементов среды и представления их как структурных составляющих. Изложим подход к структурированию полисубъектной среды, который согласуется с обобщенными и частными процедурами действий субъекта, изложенными в работе В.Е. Лепского [16, с. 243–244]:
– идентификация актуализированных субъектных позиций;
– совместное формирование субъектом и средой новой субъектной позиции;
– рефлексивный синтез (построения моделей деятельности, моделей субъектов деятельности, личностных моделей и др.).
Выделяем три уровня структурирования полисубъектной среды.
Первый уровень. Упорядоченность полисубъектной среды состоит в идентификации позиций субъектов, действующих в контурах информационного пространства, по признаку – мера неопределенности доступности поставляемой и воспринимаемой ими информации. По поставщикам и потребителям информации проведено группирование их по типам, что представляет типологическую модель полисубъектной среды [18, с. 69–75].
Второй уровень. Упорядоченность пространства «хаоса» исходит из процедуры «совместное формирование субъектом и средой новой субъектной позиции», т.е. некоторой элементарной средовой структуры, к которой относим деловую ситуацию. Деловая ситуация формирует область взаимодействия субъектов на момент t, t = 1,...,N. В итоге модель полисубъектной среды представляем как пространство, состоящее из изменяющихся деловых ситуаций, каждая из которых является носителем неопределенности. Экономика знаний привносит «уплотнение» количества ситуаций во времени.
Третий уровень. Упорядоченность полисубъектной деловой среды состоит в представлении её множеством элементарных организационных структур «субъект-субъект». Пространством с характерными свойствами и моделями управления взаимодействием экономических субъектов являются, прежде всего, финансовый и товарный рынки. Аксиома поведения субъекта на рынках как в «полисубъектной среде» – это выбор из множества субъектов и «передача одним из взаимодействующих субъектов другому оснований для принятия решений» в определенной ситуации.
Выделенные «элементарные» структуры полисубъектной среды на всех уровнях её упорядоченности сопряжены с неопределенностью или являются её носителями. Развернутое представление о средовой неопределенности дается в работе [19] с выделением её типов. Первый тип неопределенности назван «определенное будущее». В этом случае для разработки будущей деятельности экономической системы достаточно построение одного прогноза. Второй тип – «многовариантное будущее». Здесь разработка будущих действий субъекта должна проводиться при учете возможных изменений дискретных состояний среды. Третий тип – «диапазон будущего», что не позволяет использовать сценарный подход, а требует учета чрезвычайно большого количества возможных состояний внешней среды. Четвертый тип – «истинная неоднозначность будущего», не позволяет делать какие-либо прогнозы. Первые два вида неопределенности следует отнести к детерминистскому хаосу, третий и четвертый к стохастическому хаосу.
Ситуационная неопределенность наследует средовую неопределенность и воспроизводится непредсказуемыми событиями, происходящими в режиме «онлайн». Вид наследуемой неопределенности зависит от того, в какой категории хаоса полисубъектной среды сложилась ситуация на некоторый период (ti + τi). Представим виды образуемых ситуаций в среде детерминистского и стохастического хаоса на основе формализованного описания среды в работе [19]. При детерминистическом хаосе имеем:
– первое, состояние сложившейся ситуации соответствует некоторому тренду развития среды (отрасли), характер которого неоднозначный: равномерный темп изменения; монотонно нарастающие изменения; неравномерный, скачкообразный темп изменения;
– второе, состояние сложившейся ситуации требует быстрой реакции на оценку возможных и допустимых альтернатив в принятии решений.
Стохастический хаос затрудняет распознавание ситуации, так как раздвигается «диапазон возможного будущего» или предстает «истинная неоднозначность будущего». Неопределенность ситуации усложняет управление тем, что отводится небольшой интервал времени для её познания и принятия решений. Деловые ситуации в зависимости от меры неопределенности (в рамках континуума «низкая – высокая») подразделены на четыре типа: низкая, умеренная, умеренно высокая и высокая. Параметром, определяющим степень неопределенности деловой ситуации, выступает характеристика дестабилизирующих факторов – мало их или много, схожи они или нет, не меняются или постоянно меняются.
Очевидно, что рассмотренные виды неопределенности вызывают непрекращающийся дрейф экономической системы и поиск устойчивой траектории поведения (внутренних аттракторов) и траектории движения (внешних аттракторов) в окружающей полисубъектной среде. Подход к созданию устойчивого функционирования экономической системы в столь возмущенной, хаотичной среде – это исследования, направленные на развитие теории и механизма робастного управления, фундаментальные основы которой заложены в теории робастности в приложении к техническим системам и авторами статьи к экономическим системам [2, 8].
Механизм робастного управления как регулятор адаптации экономических систем
Обоснование модели механизма робастного управления открытой сложной системой базируется на обращении к общенаучным законам эволюции, согласно которым для поддержания динамического равновесия организма или другой биосистемы выстраивается гомеостаз, состоящий из «ансамбля существенных параметров целого». В работе [20, с. 113], её автор, И.В. Прангишвили, определяет роль гомеостаза системы как характеристику её целостности и способ обеспечения внутренней безопасности системы. Классическое определение гомеостаза по И.В. Прангишвили [20, с. 331]: «функциональное состояние системы, при котором обеспечивается поддержание динамического постоянства в допустимых пределах жизненно важных функций и параметров системы при различных изменениях внутренней и внешней среды».
Согласно разработанной модели конструкции механизма робастного управления, он включает два гомеостаза: на входе в систему – адаптивный гомеостаз, на её выходе – робастный гомеостаз, отстроенные для определенной стадии жизненного цикла экономической системы. Такая постановка соответствует положению: «движение» системы по траектории жизненного цикла – это возмущенное движение системы, образуемое под воздействием флуктуаций различного порядка относительно расчетной траектории, сопровождаемое «облаком» неопределенности. Возмущенное движение происходит с различающейся «скоростью» по некоторой траектории, на которой формируются стадии жизненного цикла системы как некоторые «временные последовательности» в фазовом пространстве.
Адаптивный гомеостаз выстраивается из совокупности параметров, ограничивающих и раскрывающих возможности для успешной деятельности и развития экономической системы в полисубъектной среде на определенной стадии её жизненного цикла. Различие целей управления по стадиям жизненного цикла системы вызывает построение изменяющегося по времени адаптивного гомеостаза. Обозначим его как AT-гомеостаз. Изменение параметров в установленных пределах AT-гомеостаза, описываемое определенной статистической функцией, определяет возможные и предпочтительные альтернативы адаптационных действий системы, представляемые временными аттракторами в виде «плавающего равновесия». Ключевые аттракторы выбираются на основе оценки возможности порогового реагирования системы относительно робастного гомеостаза.
Робастный гомеостаз в соответствии с AT-гомеостазом изменяется по стадиям жизненного цикла системы, т.е. имеем РТ-гомеостаз, который выстраивается из «ансамбля существенных параметров», определяющих результативность и экономическую эффективность деятельности экономического субъекта. Изменение каждого параметра ограничено робастным пределом. Авторами статьи введено понятие робастного предела как «некоторой обоснованной «нормы» экономических и организационных изменений параметров порядка (гомеостатических), определяющих результаты деятельности экономических систем с позиций достижения поставленных целей» [8, 9].
Цель механизма робастного управления как синтезированного регулятора в выстраиваемом контексте принятия решений – обеспечивать сохранение выходных переменных системы в рамках робастного предела при всех типах неопределенности. Вся сложность ввести систему в робастную устойчивость с обеспечением выходных показателей в рамках робастного предела состоит в том, что требуется управлять комплексом параметров порядка случайного характера. При этом обратим внимание на утверждение, приведенное И. Пригожиным и И. Стингерс в [5, с. 281]: свойство устойчивости «связано с ответом системы на возмущения различного типа. В связи с этим некоторое «стандартное состояние» Xs1,..., Xsi,..., где {Xsi} представляет собой набор переменных состояния, непрерывно зондируемых внутренними флуктуациями и внешними возмущениями».
Структура механизма робастного управления формируется из некоторого числа «фреймовых локальных систем знаний» (ФЛСЗ), содержащих потенциал знаний для формирования цепочки управляющих действий системы по каждой переменной AT-гомеостаза: «стратегия – тактика (текущие планы) – оперативное принятие решений по ситуации – воздействие на ситуацию». Фреймовый метод организации знаний следует рассматривать как метод плавающей периодизации обработки динамических рядов экономических данных для устранения диспаритета между имеющимися и требуемыми знаниями, необходимыми для создания робастной устойчивости экономических систем. Механизм робастного управления создается на основе развитого когнитивизма (формирование расширенного контекста знаний о внешней среде) и конструктивизма (превращение знаний в некоторые конструкции фреймов: модели стратегии, тактики и оперативных действий).
Структура ФЛСЗ – двухуровневая. Первый уровень представляется в виде связки модулей по выработке стратегических, тактических и оперативных решений. Второй уровень – это сеть из дизъюнкций. На нем происходит последовательная «сборка» решений из модулей в дизъюнктивную конструкцию, представляющую «плавающее равновесие», обеспечивающее функционирование системы на некоторый период t∈T без нарушения пороговых значений выстроенного робастного предела.
Каждый элемент механизма робастного управления на этапе его разработки направлен на преодоление неопределенности. Так, стратегия ориентирована в основном на преодоление средовой неопределенности. Разработка оптимизационных планов ведется с учетом влияния, прежде всего, объектной неопределенности, а в связи с соответствием их стратегии, то и средовой неопределенности. При переходе к реализации планов в посуточном режиме идет погружение в ситуационную неопределенность при одновременном преодолении объектной неопределенности.
Формализованное представление полной модели механизма робастного управления – это образование в виде модели нейронной сети, настроенной на распознавание сложившейся ситуации «эвристически», нахождением лучшего из возможного согласно определенному правилу обучения выбору. Результаты, генерируемые механизмом робастного управления, представляются:
– первое, внутренним аттрактором, обеспечивающим выходные параметры функционирования экономической системы в пределах РТ-гомеостаза,
– второе, внешним аттрактором и AT-гомеостазом для возмущенного её движения в полисубъектной среде хаоса и неопределенности.
Модель фрагмента механизма робастного управления для первого уровня формирования представляется как последовательность модулей принятия решений и элементами «сборка», которые выполняют функции аккумулирования, преобразования, выбор и формирование модели действий для каждого последующего уровня принятия решений с целью выстраивания аттрактора – «плавающего равновесия» (рис. 2).
|
Гранулированная информация предела каждого параметра адаптивного гомеостаза, принятая на момент t∈T как исходная |
Формирование стратегии на основе управляемого синтеза деловых стратегий на момент t∈T |
Тактика: оптимальное годовое и текущее планирование с расчетом вариантов планов под некоторый набор стратегий |
Оперативное управление в режиме управление по отклонениям по принятому варианту плана и с периодической адаптацией к изменениям |
Достигнутые показатели финансовой состоятельности в контурах робастного гомеостаза |
|
Предел изменения параметра, выявленный исходя из средовой и объектной неопределенности |
Синтез деловых стратегий, ориентированный на преодоление средовой и объектной неопределенности |
Пересчет или корректирование планов под влиянием средовой, объектной и ситуационной неопределенности |
Корректирование или пересчет текущих (месячных и суточных) планов под влиянием ситуационной и объектной неопределенности |
Предел изменения выходного параметра, выявленный исходя из допустимой «нормы» экономических изменений |
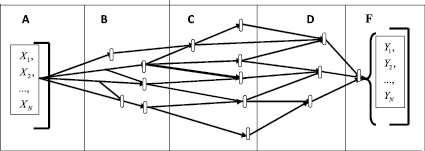
Рис. 2. Структура модели ФЛСЗ первого уровня её формирования.  – элемент «сборка» фреймов в их комбинации
– элемент «сборка» фреймов в их комбинации
Каждый выделенный на рис. 2 модуль принятия решений выполняет следующие функции:
А – построение AT-гомеостаза, основанное на выборе параметров ограничений или возможностей деятельности экономической системы, построение прогностической модели их изменений под влиянием средовой неопределенности с выделением пределов изменений параметра и «точек разладки» – метода разложения прогностической функции на периоды вероятного времени устойчивой работы системы;
B – формирование вариантов деловых стратегий и составление из них некоторого набора гибких интегрированных стратегий, отвечающих характеру средовой и объектной неопределенности;
C – разработка вариантов годовых и текущих (квартальных, месячных в посуточном цикле) планов с оценкой влияния средовой и объектной неопределенности, обеспечивающих реализацию той или иной интегрированной стратегии из составленного набора вариантов;
D – исполнение оперативного плана в режиме с обратной связью и адаптации к ситуационной и объектной неопределенности и оперативное корректирование или пересчет текущего плана для выстраивания «плавающего равновесия» – как временного аттрактора на период t∈T;
F – построение РТ-гомеостаза, основанное на выборе параметров, определяющих финансовую состоятельность экономического субъекта, и нахождении для каждого из них робастного предела.
Следует отметить, что на рис. 2 приведена модель локальной структуры механизма робастного управления, его фреймовая локальная система знаний (ФЛСЗ). Дадим пояснение элементу «сборка». Концепт «Сборка» рассматривается Я.И. Свирским в [21, с. 308–309] как один из терминов, «содержательно характеризующих сложностное мышление в его связи с инновациями», и направленный на то, чтобы показать возможность соединения крайне разнородных элементов. «Сборка» – это «соединение, формирующее своего рода «карту», а не кальку той или иной предметной области и предполагает любые формы соединений».
Для раскрытия сложности и динамичности в разработке и принятии решений по каждому модулю обратимся к моделям организации проектирования в машиностроительных компаниях Японии. Различаются модели проектирования с таким метафорическим определением, как «Бег с эстафетой» и «Игра в регби». Модель механизма робастного управления – это модель «Игра в регби». Каждый модуль ФЛСЗ создает базу возможных вариантов действий (все бегут), соответствующих значениям параметров AT-гомеостаза, чтобы без излишних затрат времени («передать мяч на бегу») образовывать из вариантов разработанных решений временной аттрактор – «плавающее равновесие», при котором система не выходит за пределы РТ-гомеостаза.
Заключение
Мир рыночной экономики в своем развитии вбирает для его познания множество аналогий относительно естественного мира: адаптация систем, хаос, предел, слабая предсказуемость явлений, чувствительность к начальным условиям, например «эффект бабочки». Основные аспекты теории робастного управления экономическими системами, развиваемые в статье, прокладывают путь для устойчивого их функционирования в среде хаоса, наполненного неопределенностью. К ним относятся сформулированные принципы адаптации экономических систем; выстроенная взаимосвязь между видами флуктуаций и структурными образованиями (объект, среда, ситуация); предложенный образ модели механизма робастного управления с элементами: адаптивный гомеостаз, нейронная сеть фреймов знаний по стратегии, тактике, оперативному управлению и робастный гомеостаз.
Работа выполнена при финансовой поддержке Российского фонда фундаментальных исследований (РФФИ), проект № 18-010-00700.
Библиографическая ссылка
Алексеев М.А., Фрейдина Е.В. К ТЕОРИИ ГИБКОЙ АДАПТАЦИИ ЭКОНОМИЧЕСКИХ СИСТЕМ ПОСРЕДСТВОМ РОБАСТНОГО УПРАВЛЕНИЯ // Фундаментальные исследования. 2019. № 6. С. 7-17;URL: https://fundamental-research.ru/en/article/view?id=42479 (дата обращения: 10.07.2026).