


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
RESEARCH OF GAS TURBINE UNITS ADAPTIVE CONTROL ALGORITHMS IN STARTING COMMENSURATE POWER ASYNCHRONOUS MOTORS

Газотурбинные установки (ГТУ), создаваемые на базе авиационных двигателей для привода электрогенераторов, работоспособны только при наличии системы автоматического управления (САУ) [3], которая призвана обеспечить необходимый режим работы электростанции при заданных показателях качества вырабатываемой электроэнергии [4, 5]. При этом ГТУ в первую очередь влияют на показатели качества электроэнергии по частоте: величину максимальных отклонений частоты и длительность этих отклонений. Требования к этим показателям очень жесткие [4, 5], и выполнить их, прежде всего при автономной работе газотурбинной электростанции на выделенную нагрузку, сложно.
Известно, что электроснабжение потребителей в основном осуществляется от источников, объединенных в единую систему. Однако возможны случаи, когда источником электрической энергии является один генератор, работающий на определенную группу электроприемников. Таким системам, как правило, присуща соизмеримость мощностей источника электроснабжения и отдельных электроприемников, в особенности двигателей. Примером могут служить судоходные транспортные средства, карьерная техника, грузоподъемные объекты с электрической тягой, объекты в отдаленных и труднодоступных местах, например в условиях газо- и нефтедобычи и другие автономные системы. В таких системах важно уметь правильно оценивать влияние переходных процессов на работу всего узла и обеспечивать успешный запуск электрического двигателя, мощность которого соизмерима с мощностью генератора [15].
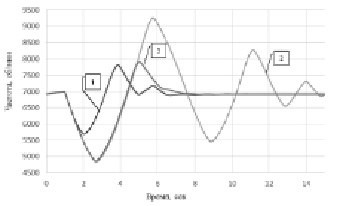
Рис. 1. Частота вращения свободной турбины ГТУ: 1 – эталонная модель, 2 – САУ без адаптации, 3 – САУ с адаптацией
САУ ГТУ с неадаптивной жесткой структурой, которые в настоящее время используются в таких автономных электростанциях, сталкиваются с известными сложностями в обеспечении регулирования частоты вращения свободной турбины ГТУ и, как следствие, частоты электрогенератора. Поэтому в качестве перспективного рассматривается адаптивный подход. Применение адаптивного подхода к управлению ГТУ для электростанций ранее рассмотрено ранее в ряде работ. В работе [7] исследована табличная настройка САУ ГТУ, такая САУ, вообще говоря, не является адаптивной, профессор В.Я. Ротач предлагает считать такую САУ нелинейной [13]. Рассмотрены адаптивные системы управления с эталонной моделью и сигнальной настройкой [8], при существенном преобладании нелинейных свойств, и с эталонной моделью и параметрической настройкой при существенном преобладании нестационарных свойств [9] Проведены исследования [11] для упрощения технологии и уменьшения времени получения математических моделей как ГТУ, так и систем ГТУ-СГ. В настоящей статье исследуется работоспособность адаптивной САУ для одного из наиболее сложных режимов работы автономной газотурбинной электростанции: режима пуска соизмеримого по мощности асинхронного двигателя.
Адаптивный подход
Внедрение адаптивных систем позволяет даже при существенной нелинейности и нестационарности параметров улучшить показатели качества динамических характеристик, сократить сроки внедрения, облегчить наладку САУ и повысить их качество [1].
Например, при объединении модели ГТУ и синхронного генератора (СГ) [6] были получены следующие результаты при ступенчатом изменении нагрузки генератора c 140 кВт (холостой ход) до 3 МВт (рис. 1). В статье [6] рассматривается ГТУ мощностью 6 МВт, где использовалось адаптивное управление с сигнальной настройкой, при котором достигнуто улучшение динамических показателей регулирования частоты по максимальному отклонению на 11,21 %, по длительности переход процесса на 81,15 %.
Ступенчатое изменение нагрузки, однако, не всегда достаточно для исследования. С одной стороны, такие возмущения редко происходят в чистом виде, а с другой, ступенчатое возмущение, вообще говоря, предназначено для исследования линейных систем. Например, в [14] отмечается, что для нелинейных систем ступенчатый наброс максимальной нагрузки не обязательно является самым тяжелым режимом работы. САУ ГТУ существенно нелинейна [10], а такой режим, как запуск асинхронных двигателей, – один из самых распространенных на практике для автономных электростанций малой и средней мощности.
Пуск асинхронного двигателя
Обусловленные пусками и самозапусками двигателей соизмеримой мощности или резкими изменениями другой нагрузки, переходные процессы могут вызвать значительное ухудшение качества электроэнергии, которое проявляется в провалах и всплесках напряжения и частоты. Естественно, что такое изменение параметров режима системы оказывает отрицательное влияние на работу всех электроприемников. К мерам, обеспечивающим требуемое улучшение качества электроэнергии и успешность пусков двигателей, можно отнести применение интенсивного регулирования турбины и возбуждения СГ, а также правильный выбор мощности генераторов. В [16] показано, что генератор может обеспечить пуск асинхронных двигателей (АД) с общей полезной мощностью на валу равной 70 % полной мощности генератора.
С другой стороны, требования ГОСТ [5] и различных ведомственных руководящих документов, например [15], требуют обеспечения возможности пуска асинхронного короткозамкнутого двигателя с мощностью, зависящей от мощности электростанции.
Для анализа режимов запуска мощного асинхронного двигателя (АД) от генератора соизмеримой мощности рассмотрим схему узла нагрузки, показанную на рис. 2, где УУ – управляющие устройства. В качестве генератора выбран синхронный турбогенератор типа ГТГ-6-2Р, параметры которого приведены в табл. 1.
Основной нагрузкой узла является мощный асинхронный двигатель типа 2АЗМ-6000, параметры которого представлены в табл. 2.
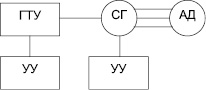
Рис. 2. Схему узла нагрузки
В качестве модели ГТУ используется сложная динамическая модель ОАО «Авиа-двигатель» (г. Пермь), предназначенная для тестирования алгоритмов управления и использования в составе полунатурных испытательных стендов.
В качестве модели САУ используется программный код штатной САУ электроэнергетической ГТУ.
Таблица 1
Паспортные данные синхронного генератора
|
Тип |
Uном, кВ |
Pном, кВт |
ηном, % |
n, об/мин |
Iном, А |
J, кг*м2 |
|
ГТГ-6-2Р |
6,3 |
6000 |
97,5 |
3000 |
687 |
90 |
Таблица 2
Паспортные данные асинхронного двигателя
|
Тип |
Uном, кВ |
Pном, кВт |
ηном, % |
n, об/мин |
Iном, А |
Cosφном |
J, кг*м2 |
|
2АЗМ-6 |
6,3 |
2000 |
96,5 |
3000 |
220 |
0,91 |
40,01 |
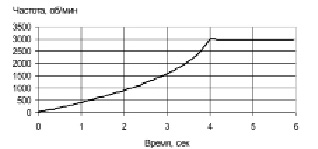
Рис. 3. Частота вращения ротора АД при пучке от мощной сети
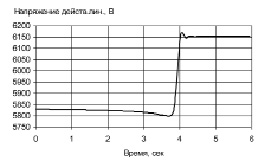
Рис. 4. Напряжение сети при пуске АД
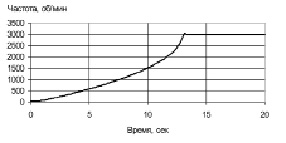
Рис. 5. Частота вращения ротора АД при пуске от генератора соизмеримой мощности
В качестве модели СГ и АД используется математическое описание в форме уравнений Парка-Горева [2]. При запуске момент холостого хода АД принят равным 100 Н*м. Все модели выполняются совместно в составе программного моделирующего комплекса КМЭС [12].
Исследование результатов моделирования
Рассмотрим результаты моделирования.
Произведем пуск АД от мощной сети электроснабжения (рис. 3–4).
Теперь произведем пуск АД от генератора соизмеримой мощности ГТГ-6-2Р (рис. 5–6).
В результате, как и следовало ожидать, пусковой процесс АД при питании от мощной сети протекает намного быстрее, чем при питании от генератора соизмеримой мощности.
Проведем дальнейшие эксперименты с использованием адаптивного управления и сравним результаты.
При этом используется следующий адаптивный алгоритм управления с сигнальной настройкой (рис. 7), поскольку такая настройка обладает неоспоримым достоинством – наибольшей скоростью адаптивных процессов в отличие от алгоритмов параметрической настройки. Кроме того, ГТУ в первую очередь проявляет нелинейные свойства (в этом случае также рекомендуется сигнальная настройка [1]). Более подробно сигнальная настройка описана в статье [3].
Важно отметить, что адаптивный алгоритм реализуется на практике в виде отдельного модуля адаптации. При этом структура штатных регуляторов селективной САУ ГТУ не изменяется (блок «Регулятор» на рис. 7). Сигнал, вырабатываемый модулем адаптации лишь меняет значение сигнала уставки штатной САУ (сигнал g(зад), рис. 7). В этом заключается важное преимущество рассматриваемого подхода.
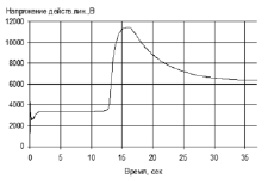
Рис. 6. Напряжение СГ ГТГ-6-2Р ГТГ-6-2Р при пучке АД
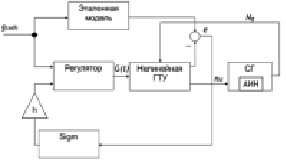
Рис. 7. Адаптивная система регулирования с сигнальной настройкой, где АИН – активно-индуктивная нагрузка, Sigm – сигмоидальная функция, h – коэффициент усиления регулирующего воздействия сигнальной ветви
При адаптивном управлении время запуска АД и напряжение СГ меняются мало (рис. 8–9). Однако частота вращения СГ за счет адаптации, как это видно из рис. 10, несколько улучшается только на начальном этапе переходного процесса (примерно до 14-й секунды). Затем отклонение частоты при адаптивном управлении становится значительно хуже, чем при отсутствии адаптации.
Модификация адаптивного алгоритма управления
Ухудшение показателей качества частоты вращения свободной турбины связано с тем, что газотурбинная электростанция после окончания запуска АД работает в режиме близком к холостому ходу (рис. 11) и сигнальное воздействие вызывает переключение управляющего контура. Поскольку сброс нагрузки происходит до холостого хода, адаптивная система пытается максимально уменьшить расход топлива, из-за чего достигается ограничение по минимальному расходу топлива регулятора штатной САУ ГТУ. Для того, чтобы адаптивная система приводила к улучшению показателей качества, необходимо избежать переключения канала управления на режим ограничения, а следовательно, необходимо ограничить сигнальное воздействие. Добиться ограничения сигнального воздействия можно двумя способами. Первый способ заключается в изменении работы эталонной модели в заданном диапазоне нагрузки. Это нежелательно, поскольку реакция эталонной модели на изменение нагрузки соответствует ГОСТ и этот подход требует проведения дополнительных исследований и, возможно, включения табличной настройки в состав эталонной модели. Второй способ связан с изменением возможного диапазона значений сигнальной ветви с помощью изменения параметра h сигнальной ветви.
Применим второй способ, как более простой и сохраняющий эталонную модель в неизменном виде. Ограничим сигнальное воздействие, уменьшив его в 2 раза.
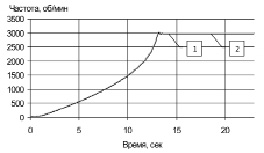
Рис. 8. Частота вращения ротора АД: 1 – с использованием адаптации, 2 – без адаптации
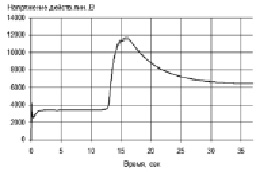
Рис. 9. Напряжение СГ: 1 – с использованием адаптации, 2 – без адаптации
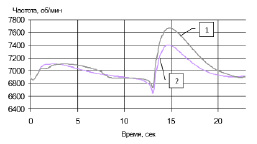
Рис. 10. Частота вращения СГ при пуске АД: 1 – с использованием адаптации, 2 – без адаптации
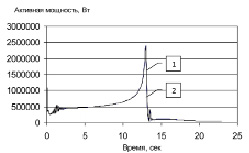
Рис. 11. Мощность АД при пуске: 1 – с использованием адаптации, 2 – без адаптации
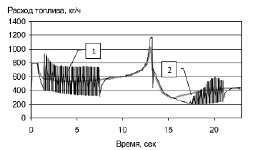
Рис. 12. Расход топлива: 1 – с использованием адаптации, 2 – без адаптации
В результате можно сделать вывод о том, что в режимах работы близких к режиму холостого хода даже минимальное сигнальное воздействие негативно влияет на работу регулятора (рис. 12).
На рис. 12 видны постоянные переключения между контуром ограничения минимального расхода топлива и адаптивным контуром стабилизации частоты вращения свободной турбины. Именно из-за постоянных колебаний расхода топлива снижаются показатели качества. Ограничение сигнального воздействия позволяет снизить частоту и амплитуду этих колебаний и улучшить показатели качества переходного процесса.
Исследование модифицированного алгоритма адаптации
Сравним модифицированный алгоритм адаптации (алгоритм с ограничением) с полученными ранее переходными процессами (рис. 13).
Как можно видеть, на начальном участке модифицированный алгоритм существенно улучшает качество электроэнергии по частоте: сокращается длительность переходного процесса на 5,2 секунд по сравнению с системой без адаптации и на 4,6 секунд по сравнению с базовой адаптивной системой. Отклонение частоты также уменьшается.
Однако на втором участке происходит лишь незначительное улучшение по сравнению с базовой адаптивной системой.
Заключение
В результате проведенных исследований получены результаты, которые можно суммировать следующим образом.
1. Алгоритм адаптации, который успешно справляется со ступенчатыми набросами и сбросами нагрузки, не может существенно улучшить показатели регулирования при рассмотрении запуска соизмеримого по мощности асинхронного двигателя. На отдельных участках может происходить ухудшение характеристик в сравнении с неадаптивной системой. Показано, каким образом нелинейность САУ влияет на переходный процесс запуска АД и затрудняет работу алгоритма адаптации.
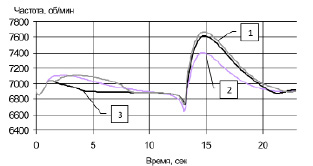
Рис. 13. Частота вращения свободной турбины при пуске АД: 1 – с использованием адаптации, 2 – без адаптации, 3 – с использованием адаптации с ограничением
2. Предложен и исследован способ улучшения алгоритма адаптации, который улучшает переходный процесс в режиме увеличения мощности нагрузки, но во время сброса мощности на холостой ход не дает улучшения в сравнении с базовым алгоритмом адаптации.
3. Требуются дальнейшие исследования по возможному улучшению применяемого алгоритма адаптации. Одним из наиболее простых способов может являться отключение модуля адаптации и передача управления штатной САУ по условию попадания в границы указанного режима.
Опубликованные в статье результаты получены в рамках выполнения государственного задания Минобрнауки РФ № 13.832.2014/K «Разработка методологических основ адаптивного управления автономными и неавтономными газотурбинными электростанциями мощностью до 25 МВт».
Библиографическая ссылка
Зиятдинов И.Р., Кавалеров Б.В., Бахирев И.В. ИССЛЕДОВАНИЕ АДАПТИВНОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ ПРИ ПУСКЕ СОИЗМЕРИМОГО ПО МОЩНОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ // Фундаментальные исследования. 2016. № 12-1. С. 49-57;URL: https://fundamental-research.ru/en/article/view?id=41045 (дата обращения: 02.07.2026).