


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
UNIFIED QUALITY TRANSIENTS FOR AUTOMATED TESTING OF GAS TURBINES POWER

Электроснабжение определяется двумя факторами [9] – качеством электроэнергии и её надёжностью. Даже самые лучшие системы производства электроэнергии и её распределения не могут быть полностью надёжными источниками высококачественного электропитания. Вырабатываемая электроэнергия проходит долгий путь от электростанции через передающие подстанции к конечному потребителю, и чем дальше от источника, тем больше риск возникновения проблем с качеством и надёжностью электроснабжения.
Важным направлением улучшения качества электроэнергии и ее надежности является концепция «Интеллектуальной сети», или Smart Grid.
В России идея Smart Grid в настоящее время выступает в качестве концепции интеллектуальной активно-адаптивной сети, которую можно описать следующими признаками [7]:
- насыщенность сети активными элементами, позволяющими изменять топологические параметры сети;
- большое количество датчиков, измеряющих текущие режимные параметры для оценки состояния сети в различных режимах работы энергосистемы;
- система сбора и обработки данных (программно-аппаратные комплексы), а также средства управления активными элементами сети и электроустановками потребителей;
- наличие необходимых исполнительных органов и механизмов, позволяющих в режиме реального времени изменять топологические параметры сети, а также взаимодействовать со смежными энергетическими объектами;
- средства автоматической оценки текущей ситуации и построения прогнозов работы сети;
- высокое быстродействие управляющей системы и информационного обмена.
Еще одна потребность в «Smart Grid» связана с так называемыми возобновляемыми источниками энергии [12]. И у нас, и в Европе [11] много говорят, что нужно уходить от углеродной энергетики, связанной со сжиганием органического топлива, и переходить на альтернативную энергетику – солнечную, ветровую, водородную и т.д.
Одним из возможных направлений развития электрических сетей в рамках концепции «умной сети» является использование адаптивного управлений генерирующими модулями электросетей. Такие генерирующие модули смогут в перспективе самоприспосабливаться к изменяющимся режимам работы с целью поддержания заданного качества и надежности электроснабжения.
В статье [2] рассматривалось адаптивное управление газотурбинными установками электростанций с помощью сигнальной настройки. В настоящей статье исследуется адаптивное управление с параметрической настройкой [4].
Системы адаптивного управления
Можно выделить несколько вариантов построения систем адаптивного управления [1].
Адаптивные системы [10] управления с идентификатором (АСИ) – новый класс систем управления, появление которых вызвано необходимостью управлять нестационарными объектами и объектами, передаточные функции которых заранее точно не известны.
Функционирование АСИ осуществляется в двух режимах: обучения и управления. Оба режима выполняются автоматически. Самообучение осуществляется в блоках идентификации. По окончании процесса обучения система автоматически переходит на режим управления, при осуществлении которого процесс оперативной идентификации автоматически продолжается, что обеспечивает отслеживание изменяющихся в процессе функционирования объекта текущих значений параметров.
Одним [3] из факторов, сужающим область применения идентификационного подхода к задачам адаптивного управления, является требование к точности выдаваемых идентификатором оценок параметров. Такие требования обычно формируются в виде выполнения условий состоятельности оценок, сходимости оценок к истинным значениям, ограниченности ошибок оценивания по какой-либо норме.
Идентификационный [5] подход к задаче синтеза регулятора называют также непрямым, в отличие от прямого подхода, когда настраивается не модель объекта, а непосредственно коэффициенты регулятора. В отличие от альтернативных схем системы с идентификатором более универсальны. Идентификатор в качестве датчика параметрических возмущений может применяться для решения ряда важных задач обслуживания систем управления, например для диагностики медленных параметрических отказов.
Математическое описание применяемого метода
Если разработать разностную схему для численного интегрирования, то реализация данного беспоискового алгоритма идентификации с адаптивной моделью (БАИАМ) в программном виде, как легко видеть, требует вычислительной производительности лишь в полтора-два раза большей той, которая необходима для моделирования идентифицируемого объекта в реальном времени. Однако здесь требуется высокая степень непосредственной наблюдаемости объекта (измерение х, и, измерение или вычисление  ).
).
Настройка параметров регулятора соответствует следующему уравнению [10]:

 (1)
(1)
где v – расширенный вектор состояния, δ – матрица настраиваемых параметров [10].
Исследование и сравнительный анализ
Проведем сравнительный анализ выбранного метода с помощью математического моделирования. Рассмотрим отдельный генерирующий модуль, состоящий из электрической нагрузки, ГТУ, синхронного генератора (СГ).
Адаптивное управление происходит по формуле (14).
Синхронный генератор и электрическая нагрузка моделируются с помощью полных уравнений Парка-Горева с учетом демпферных токов при общепринятых допущениях [6]. ГТУ моделируется с помощью следующих уравнений с учетом нелинейных зависимостей между переменными. В операторной форме уравнения СГ имеют вид
 (2)
(2)
Моделирование при нагрузке в 3 МВт
В начале модельного эксперимента достигается режим холостого хода, и момент времени 5 с подается нагрузка на СГ в виде активной мощности (P) равной 3 МВт, т.е. 50 % от номинального значения, время моделирования равняется 20 секундам.
Регулятор частоты вращения свободной турбины
 (3)
(3)
передаточная функция дозатора газа:
 (4)
(4)
В первую очередь рассмотрим алгоритм настройки линейной модели в процессе управления. В [8] он рассмотрен для линейного объекта и линейной модели, имеющих в пространствах состояний следующий вид:
 , (5)
, (5)
 , (6)
, (6)
где вектор x представлен в следующем виде: x1 = nСТ, x2 = nTK, x3 – выход интегратора регулятора дозатора газа, x4 – выход интегратора регулятора nСТ.
Алгоритм настройки будет иметь следующий вид:
 , (7)
, (7)
 , (8)
, (8)
 , (9)
, (9)
где K, D – положительно-определенные диагональные матрицы заданных постоянных коэффициентов. Все векторы x, xМ, u,  ,
,  считаются непосредственно наблюдательными (измеряемыми). Устойчивость процесса идентификации обеспечивается благодаря функции Ляпунова.
считаются непосредственно наблюдательными (измеряемыми). Устойчивость процесса идентификации обеспечивается благодаря функции Ляпунова.
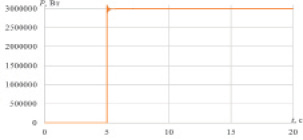
Рис. 1. Активная мощность, подаваемая на СГ
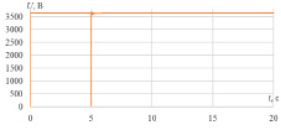
Рис. 2. Напряжение
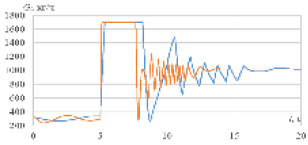
Рис. 3. Расход топлива ГТУ.  – без адаптации,
– без адаптации,  – с адаптацией
– с адаптацией
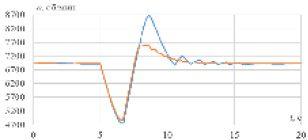
Рис. 4. Частота вращения свободной турбины.  – без адаптации,
– без адаптации,  – с адаптацией
– с адаптацией
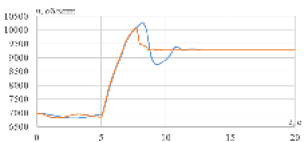
Рис. 5. Частота вращения турбокомпресссора.  – без адаптации,
– без адаптации, – с адаптацией
– с адаптацией
После моделирования были получены следующие результаты. На рис. 1 изображена активная мощность, на 2 напряжение, на рис. 3 приведен график расхода топлива необходимого для ГТУ, на 4 частота вращения свободной турбины и на рис. 5 частота вращения турбокомпресссора.
Расчет напряжения производился по формуле
 (10)
(10)
В ходе моделирования нагрузки в 50 % от номинального значения не было выявлено влияние введения адаптивного регулятора на характер напряжения.
Заключение
Проанализировав результаты моделирования, видим что качество генерируемой электроэнергии по частоте стало лучше. Частота вращения свободной турбины непосредственно преобразуется в частоту тока электрогенератора. Показатели регулирования частоты вращения свободной турбины ГТУ улучшились, а именно время переходного процесса на 36 %, с первоначальных 11 секунд до 7 секунд. Отклонение по частоте при первом колебании с адаптацией меньше на 3 %, а при втором колебании уже на 71 %. Также положительным результатом является уменьшение расхода топлива, время переходного процесса улучшилось на 38 % (с 8 до 13 секунд). Конечно, отклонение по частоте при первом колебании с адаптацией не изменилось, но уже при втором колебании уже на 71 %.
Библиографическая ссылка
Кавалеров Б.В., Бахирев И.В., Басаргин Ш.Д. ИССЛЕДОВАНИЕ ПАРАМЕТРИЧЕСКОЙ АДАПТАЦИИ РЕГУЛЯТОРА ГАЗОТУРБИННОЙ УСТАНОВКИ ЭЛЕКТРОСТАНЦИИ МОЩНОСТЬЮ 6 МВТ // Фундаментальные исследования. 2016. № 11-2. С. 281-285;URL: https://fundamental-research.ru/en/article/view?id=40967 (дата обращения: 23.06.2026).