


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
MODERNIZATION CLAMPING CONIC SKIDDERS TT-4M

Российская Федерация имеет самые большие запасы лесных ресурсов в мире. Площадь лесов составляет примерно 800000 га. Основная часть лесов расположена в Сибири и на Дальнем Востоке. Строительство новых дорог требует вырубки части леса. Новые дороги значительно улучшат дорожную инфраструктуру страны, а также вырубленный лес послужит для населения новым запасом строительного материала и топлива. Необходимо использование новых технологий и конструкций машин для подготовительных работ при строительстве дорог [1–3].
В целях улучшения производительности, в настоящее время широко применяется механизация труда. На лесозаготовках для транспортировки древесины возникает потребность в трелевочных машинах.
Трелевка леса представляет собой лесозаготовительную операцию по сбору и транспортировке очищенных от сучьев стволов деревьев от места их заготовки к погрузочным пунктам у лесовозных дорог. Так как лесовозными автомобилями нельзя забрать лес непосредственно на лесосеке, то необходимость этой операции очевидна. Целью трелевки является сбор деревьев с относительно большой площади на специально подготовленные погрузочные площадки у лесовозных дорог. Это проводится в исключительно трудных условиях – при полном бездорожье на любых грунтах летом или по снежной целине зимой, преодолевая множественные препятствия в виде пней, валежника, валунов и т.д. Трелевочные машины работают на невысоких скоростях (2…10 км/ч), но развивают значительные тяговые усилия. Трелевка осуществляется на небольшие расстояния: обычно до 300–400 м, иногда до 700–800 м и лишь в редких случаях до 1 км. Основными трелевочными машинами являются гусеничные тракторы ТТ-4М Алтайского тракторного завода, ТДТ-55А Онежского тракторного завода. В большинстве случаев трелевка леса происходит в полупогруженном положении («полуволоком»), т.е. один конец трелюемой пачки погружен на трелевочный механизм (коник), а второй конец волочится по земле или снегу.
Возможны различные виды и способы трелевки (рис. 1).
Различают три вида тракторов для трелевки древесины: чокерные, бесчокерные, тракторы с пачковым захватом (скиддеры). Трелевочные машины классифицируют по ходовой части: гусеничные, пневмоколесные; по назначению: общего, специального; по тяговому классу [4–6].
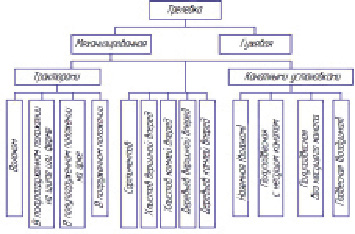
Рис. 1. Виды и способы трелевки
Прототипом в работе примем трактор ТТ-4М. Трелевочный трактор ТТ-4М (рис. 2) четвертого тягового класса предназначен для трелевки крупномерного и среднего леса, окучивания деревьев и хлыстов с высотой штабеля не более 1 м, а также в качестве базы лесозаготовительных машин.
Принцип работы трактора заключается в следующем: трактор при помощи гидроманипулятора производит формирование пакета хлыстов или деревьев с кронами, производит погрузку пачки на зажимной коник, после чего происходит транспортирование пакета. Транспортирование может осуществляться комлями или вершинами на щите в полупогруженном состоянии.
К преимуществам данного трактора стоит отнести следующие:
- Широкие гусеницы позволяют беспрепятственно перемещаться как по неровной лесной дороге, так и по болотистой местности;
- дизельный мотор умеренно расходует топливо, что способствует экономии;
- машина универсальна – на ее базе конструируют специальные устройства;
- увеличенная сила тяги, высокая надежность и защита внизу рамы;
В недостатках трактора стоит отметить:
- мотор, установленный внутри кабины, имеет большой уровень шума;
- достаточно большой вес и габариты, что способствует снижению маневренности машины в лесных условиях;
- небольшая скорость передвижения. Данный недостаток компенсирует малое давление машины на почву [7–8].
В ходе работы был проведен анализ зажимных кониковых устройств, в результате чего было решено увеличить объем обхватываемой пачки. Вследствие увеличения объема на рычаги зажимного устройства будут действовать большие силы, которые будут стремиться разжать коник. Произведен расчет зажимного устройства на усилие и надежное удержание пачки во время ее транспортировки на лесосеке. На рис. 3 приведены принципиальные схемы зажимных коников лесозаготовительных машин.
Развитие этого вида техники ведется в целях увеличения ее производительности, устойчивости, экономичности и эргономичности. Повышение показателей эргономичности повысит уровень комфорта машиниста, что несомненно скажется на его работоспособности. Автоматизация рабочих процессов на машине позволяет более точно и непринужденно справляться с поставленной для машиниста задачей. Экономия топлива приведет к меньшим выбросам вредных загрязняющих веществ в атмосферу и меньшим затратам на горючесмазочные материалы. Создание оптимальной конструкции возможно лишь при анализе существующих конструкций и изобретений. Особенностью исследования коника машины для бесчокерной трелевки деревьев является способ удержания пачки при помощи клещевого захвата, который с целью обеспечения надежного закрепления пачки вставляется в приемную банку в виде расположенных параллельно друг другу пластин, образующих между собой паз для ввода челюстей захвата [9–10].
Условия надежности удержания деревьев в клещевом захвате можно выразить неравенством:
 (1)
(1)
где Fд – сила трения одного или нескольких деревьев о зажимные рычаги под действием силы тяжести (веса) деревьев, H;
Fр – сила трения зажимных рычагов о деревья при обжиме последних, Н;
Fсопр – сила трения волочащейся по земле части дерева или части деревьев, Н.
Силы трения Fд и Fсопр могут быть выражены следующими зависимостями:
 , (2)
, (2)
где т – часть веса одного дерева или пачки деревьев, приходящаяся на захват; т = 0,52
Gд(п) – вес дерева или пачки деревьев, Н,
 , (3)
, (3)
Qд(п) – объем одного дерева или пачки деревьев, м3;
ρд – объемная масса свежесрубленной древесины, кг/м3, ρд = 1000 кг/м3;
g – ускорение свободного падения, м/с2, g = 9,81 м/с2;
f2 – коэффициент трения стволов о рычаги захвата, f2 ≈ 0,7÷1.
 , (4)
, (4)
где f’ – коэффициент сопротивления перемещению части дерева или пачки деревьев: для лесосеки или волока – f’ = 1,34÷1,73; при вытаскивании дерева из-под других деревьев в полосе повала f’ = 2,13÷2,94;
ν – коэффициент возможного возрастания сил сопротивления: для лесосеки и волока ν = 1,23÷1,31; при вытаскивании вершины дерева из-под лежащих деревьев ν = 1,1÷1,27.
Найдем силу трения деревьев о зажимные рычаги под действием веса деревьев:
 (5)
(5)

Сила трения волочащейся по земле части дерева или пачки деревьев:
 (6)
(6)
 .
.
Следовательно, сила трения зажимных рычагов о деревья при обжиме последних равна
 , (7)
, (7)
 .
.
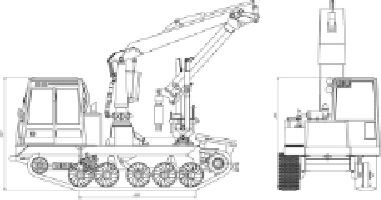
Рис. 2. Трелевочный трактор ТТ-4М
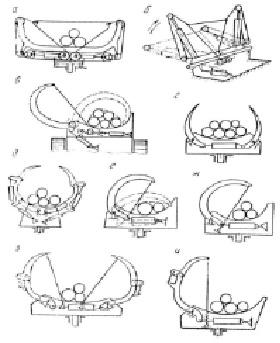
Рис. 3. Принципиальные схемы зажимных коников лесозаготовительных машин: а – КЗУ-I-I-а; б – КЗУ-I-I-б; в – КЗУ-I-2; г – КЗУ-II-1; д – КЗУ-II-2; е – КЗУ-III-1-а; ж – КЗУ-III-1-б; з – КЗУ-III-2-а; и – КЗУ-III-2-б
Чтобы определить максимальное зажимное усилие на штоке приравняем Fp = 56,863кН.
Для надежного удержания пачки деревьев произведем расчет гидроцилиндра захватного устройства.
Гидроцилиндры конико-зажимного устройства (КЗУ) определяются по следующим параметрам:
- усилие на штоке, Fmax, кН;
- скорость перемещения штока, Vi, м/с
Примем скорость перемещения штока равной 0,1 м/с.
Рабочий ход гидроцилиндра осуществляется при подаче жидкости в бес-штоковую полость. Таким образом, диаметр можно определить:
 (8)
(8)
где ηмц – механический к.п.д. цилиндра, принимаем ηмц = 0,95;
ψ = D2/(D2 – d2ш) – коэффициент мультипликации принимается ψ = 1,65;
ΔРс – потери давления в сливной магистрали, принимаем ΔРс = 0,5 МПа.
Рн – номинальное давление в гидросистеме, примем Рн = 16МПа
Расчет гидроцилиндра коникового зажимного устройства:
 м.
м.
Согласно ГОСТ 6540-68, принимаем ближайший больший, диаметр цилиндра 0,1 м.
Определим максимальный расход рабочей жидкости по формулам:
в бесштоковой полости:
 ; м3/с, (9)
; м3/с, (9)
в штоковой полости:
 м3/с, (10)
м3/с, (10)
где hоц – объемный к.п.д. гидроцилиндра, принимаем hоц = 0,98.
z – количество гидроцилиндров, работающих в паре.
Расчет максимального расхода в бесштоковой полости:
для гидроцилиндра КЗУ:
 м3/с.
м3/с.
Расчет максимального расхода для штоковой полости:
для гидроцилиндра КЗУ:
 м3/с.
м3/с.
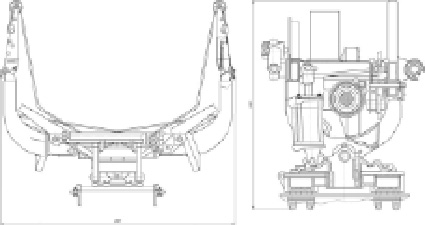
Рис. 4. Модернизированный коник
Согласно расчетам, выбираем гидроцилиндр: ЦГ1 – 100.70х500.11 – УХЛ, ГОСТ 6540-68.
Разработанное зажимное устройство за счет увеличения объема пачки обеспечит рост производительности труда. При соблюдении принятых мер безопасности создаст лучшие условия труда и удобство в эксплуатации. К тому же разработанное кониковое зажимное устройство не требует дополнительных капитальных вложений. Так как лесозаготовка является одним из приоритетных направлений РФ, то развитие данной области, а в частности появление новых конструкций, машин, является актуальным для научных школ.
Библиографическая ссылка
Мерданов Ш.М., Костырченко В.А., Мадьяров Т.М., Ахмадуллина Л.Г., Плохов А.А. МОДЕРНИЗАЦИЯ ЗАЖИМНОГО КОНИКА ТРЕЛЕВОЧНОГО ТРАКТОРА ТТ-4М // Фундаментальные исследования. 2016. № 11-1. С. 53-58;URL: https://fundamental-research.ru/en/article/view?id=40926 (дата обращения: 24.07.2026).