


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
FOUNDATION OF ADAR METHOD IN THE SOLUTION OF A PROBLEM FOR TYPICAL NONLINEAR SYSTEMS BALANCED MODES STABILIZATION

На сегодняшний день использование термина «хаос» в научных исследованиях связано с необходимостью описания таких систем, которые характеризуются совершенно случайной, на первый взгляд, динамикой и в то же время присутствием в них скрытого порядка.
Достаточно актуальная научная проблема управления хаотической динамикой не решена и в настоящее время. Из большого количества имеющихся аспектов ее решения в качестве чрезвычайно важного можно выделить исследование разнообразных методов и законов, подавляющих нерегулярные колебания в нелинейных системах, которые характеризуются наличием хаотической динамики [1, 4–5].
Проблематика управления нелинейными системами с хаотической динамикой имеет важное прикладное значение. Стоит отметить, что дело здесь не только в борьбе с хаосом, который зачастую нарушает качество функционирования сложных систем, но и в целесообразной для ряда технологических процессов идее возникновения так называемого «порядка из хаоса» [2].
Проблема подавления нерегулярных колебаний относится к наиболее характерным проблемам управления моделями с хаотической динамикой и состоит в таком формировании управляющих воздействий, при котором обеспечивается стабилизация изначально хаотической модели в устойчивом стационарном состоянии. В дальнейшем полагается, что имеется возможность влияния на динамику модели с помощью некоторого внешнего управляющего воздействия, которое аддитивно входит в состав правой части одного из ее дифференциальных уравнений.
Цель исследования. В данной работе решена задача построения скалярных законов управления, которые обеспечивают подавление хаотических колебаний в типовых хаотических системах Лоренца и Ресслера, при которых происходит стабилизация нерегулярных колебаний исходных моделей в равновесном устойчивом состоянии. Задачи аналогичного типа возникают в случае необходимости устранить нежелательные вибрации конструкций, различные шумы и т.д. [1, 4].
Материалы и методы исследования
Одним из методов эффективного решения сложной задачи управления хаосом и синтеза объективных законов управления нелинейными системами с хаотической динамикой является метод аналитического конструирования агрегированных регуляторов (АКАР), предложенный профессором А.А. Колесниковым [3].
Построение скалярных регуляторов методом аналитического конструирования агрегированных регуляторов основывается на введении последовательности инвариантных многообразий понижающейся геометрической размерности и последующей поэтапной динамической декомпозиции исходной динамической системы. В таком случае изображающая точка (ИТ) системы, начав двигаться из произвольного начального состояния, последовательно перемещается от одной поверхности притяжения к другой, пока не попадет на финишную поверхность вида ψ1 = 0 → ψ2 = 0 → ... → ψm = 0. «Внутренние» многообразия топологически вкладываются во «внешние». Таким образом, в синтезируемой системе возникает внутренний процесс самоуправления. В результате происходит каскадное формирование последовательности внутренних управлений, которые сжимают фазовый объем системы по направлению от внешней области фазового пространства к совокупности вкладываемых друг в друга внутренних областей вплоть до попадания ИТ в желаемое состояние системы.
Допустим, что в пространстве состояний замкнутой системы существует притягивающее инвариантное многообразие вида ψ(x) = 0, являющееся асимптотическим пределом фазовых траекторий. Вообще, подобных многообразий может быть несколько. Как правило, количество инвариантных многообразий совпадает с количеством каналов управления. Тогда изображающая точка системы начинает стремиться к пересечению инвариантных многообразий. Необходимым условием попадания изображающей точки замкнутой системы «объект-регулятор» на инвариантное многообразие ψ(x) = 0 является, чтобы ее движение удовлетворяло некоторому устойчивому дифференциальному уравнению, записанному относительно агрегированной макропеременной ψ(x). Такое уравнение в синергетической теории управления называют функциональным или эволюционным. Обычно система функциональных уравнений задается как система обыкновенных дифференциальных уравнений первого порядка вида
 s = 1, 2, ..., m, Ts > 0.
s = 1, 2, ..., m, Ts > 0.
Здесь m – число заданных инвариантных многообразий; Ts – управляющий параметр, φs(ψs) – функция, которая должна удовлетворять следующей совокупности условий:
1) φs(ψs) должна быть непрерывна, однозначна и дифференцируема при всех ψs;
2) φs(0) = 0;
3) φs(ψs) > 0 при любых 0,
т.е. они обращаются в нуль только на многообразиях φs = 0, относительно которых система заданных функциональных уравнений асимптотически устойчива в целом.
Как правило, в методе АКАР используются функциональные уравнения:

т.е. φs(ψs) = ψs0. Уравнения такого типа, как видно, характеризуются асимптотической устойчивостью относительно многообразия ψs = 0 при условии Ts > 0.
В данной ситуации задача синтеза законов стабилизирующего управления хаотическими моделями в общем случае формулируется следующим образом. Необходимо найти функцию uS(x) как некоторую совокупность обратных связей, обеспечивающих перевод изображающей точки исходной хаотической модели из произвольных начальных условий в некоторой допустимой области в заданное состояние (совокупность состояний), которое соответствует устойчивому режиму  . В самом простом случае управление входит только в одно дифференциальное уравнение исходной системы. Могут быть варианты, когда одно и то же управляющее воздействие находится в разных строках исходной системы [6].
. В самом простом случае управление входит только в одно дифференциальное уравнение исходной системы. Могут быть варианты, когда одно и то же управляющее воздействие находится в разных строках исходной системы [6].
Отличительным аспектом постановки задачи синергетического синтеза законов управления является наличие дополнительного требования к движению системы из начального состояния в конечное, которое состоит в асимптотическом притягивании фазовых траекторий системы к некоторому инвариантному многообразию (пересечению многообразий) в пространстве состояний (ПС) системы.
Введение в уравнения исходной модели стабилизирующей обратной связи приводит к целенаправленному изменению топологии ее пространства состояний. Вследствие подобной перестройки происходит исчезновение хаотического аттрактора и формирование регулярного аттрактора типа «точка», который соответствуют желаемому равновесному режиму поведения.
Результаты исследования и их обсуждение
Рассмотрим этапы реализованной процедуры синтеза стабилизирующего закона управления методом АКАР для хаотической системы Лоренца.
Модель Лоренца была первоначально получена из уравнений Навье - Стокса и теплопроводности с целью исследования возможности прогнозирования погодных условий при вариации управляющих параметров. Модель описывает движение конвективных валов в жидкости при температурном градиенте.
Модель представляет собой следующую систему трех обыкновенных дифференциальных уравнений [7]:

 (1)
(1)

где σ – число Прандтля; ρ – нормированное число Рэлея; параметр b зависит от взаимоудаленности плоскостей и горизонтального периода.
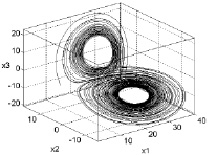
Рис. 1. Хаотический аттрактор системы Лоренца
В этой системе при определенных условиях происходит формирование хаотических колебаний. На рис. 1 показана фазовая траектория системы при значениях параметров σ = 10, ρ = 24, b = 8/3 в режиме детерминированного хаоса. В данной динамической системе впервые исследовались стохастические автоколебания. Хаотический аттрактор системы (1) принципиально отличается от хаотических аттракторов большинства моделей нелинейной динамики. Его структура полностью соответствует странному аттрактору и характеризуется наличием лишь седлового типа движения.
Предположим, что управляющее воздействие u1 входит в первое уравнение системы (1) в виде внутренней обратной связи:

 (2)
(2)

Введем одно инвариантное многообразие вида
 (3)
(3)
где μ – некоторый управляющий параметр.
Если продифференцировать функцию ψ1 (3) по времени и подставить ее производную в функциональное уравнение
 (4)
(4)
мы получим искомый закон управления:
 (5)
(5)
Закон управления (5) обеспечивает перевод изображающей точки системы (2), замкнутой обратной связью (5), на инвариантное многообразие ψ1 = 0.
Динамика движения изображающей точки модели по данному инвариантному многообразию описывается с помощью дифференциальных уравнений декомпозированной модели, которые образуются после подстановки выражения  из равенства ψ1 = 0 (3) во второе и третье уравнения системы (2):
из равенства ψ1 = 0 (3) во второе и третье уравнения системы (2):
 (6)
(6)
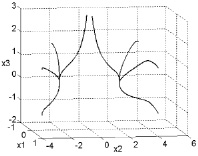
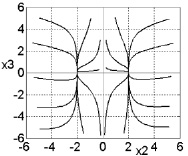
Рис. 2. Фазовые портреты систем (2), (5) и (6)
Рис. 2 иллюстрирует результаты проведенного численного моделирования системы (2), (5) при значениях управляющих параметров σ = 10, ρ = 24, b = 8/3, характерных для существования хаотического аттрактора Лоренца, и значениях параметров регулятора T1 = 0,1, μ = 4, которые подтверждают эффективность теоретических положений метода АКАР. Первое уравнение в декомпозированной системе (6) полностью идентично базовому эволюционному уравнению синергетики с бифуркацией типа «вилка».
Проведем построение стабилизирующего закона управления методом АКАР для модели Ресслера. Модель Ресслера – это нелинейная динамическая система дифференциальных уравнений третьего порядка вида [8]:
 (7)
(7)
где a, b, c – управляющие параметры.
Система (7) была предложена Ресслером для моделирования процессов взаимодействия ряда химических веществ. Данная система достаточно часто применяется в разнообразных научных исследованиях явлений разнообразной природы в связи с наличием характерных для них признаков появления и существования хаотической динамики. Рис. 3 демонстрирует хаотический аттрактор системы Ресслера при значениях параметров a = b = 0,2; c = 9.
Допустим, что управляющее воздействие входит во второе уравнение исходной системы (7):
 (8)
(8)
Вид инвариантного многообразия
 (9)
(9)
и функциональное уравнение (4) позволяют получить искомый закон управления:
 (10)
(10)
Закон управления (10) гарантирует перевод изображающей точки управляемой системы (8), которая замкнута обратной связью (10), на инвариантное многообразие ψ2 = 0 (9).
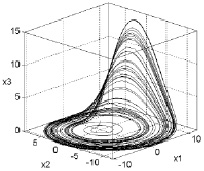
Рис. 3. Хаотический аттрактор системы Ресслера
Характер движения системы вдоль инвариантного многообразия ψ2 = 0 описывает декомпозированная модель:
 (11)
(11)
где уравнение бифуркации типа «вилка» присутствует в первой строке.

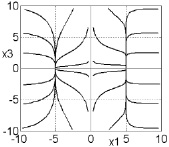
Рис. 4. Фазовые портреты систем (8), (10) и (11)
Рис. 4 иллюстрирует полученные результаты численного моделирования замкнутой системы (8), (10) для значений управляющих параметров модели a = b = 0,2; c = 9, которые характерны для возникновения аттрактора хаотического типа, а также значений параметров регулятора T2 = 0,1; μ = 25.
Выводы
В обеих полученных декомпозированных моделях (6), (11) уравнения, расположенные в первой строке, совпадают с базовым эволюционным уравнением синергетики с бифуркацией типа «вилка». В связи с этим мы можем утверждать о естественном характере синтезированных законов стабилизирующего управления исходными хаотическими системами и о имеющемся единстве и внутренней взаимосвязи универсальных эволюционных уравнений нелинейной теории самоорганизации и синергетики.
Естественный характер синтезированных управляющих законов обусловлен, прежде всего, наличием у замкнутых систем совокупности типичных бифуркационных свойств.
В результате проведенного исследования синтезирована совокупность обратных связей, при замыкании которыми исходных хаотических систем возникает изменение характера их поведения и трансформация аттрактора хаотического типа в аттрактор типа «точка». Полученные законы управления u1 (5) и u2 (10) гарантированно обеспечивают асимптотическую устойчивость во всем фазовом пространстве относительно желаемых состояний равновесия при значениях параметра μ < 0 или μ > 0 для соответствующих исходных хаотических моделей. Полученные законы u1 (5) и u2 (10) принадлежат к классу объективных законов управления, преобразовывающих системы Лоренца и Ресслера, обладающие хаотической динамикой, в базовые эволюционные уравнения теории самоорганизации и синергетики.
Синтезированные законы управления u1 (5) и u2 (10) оригинальны и универсальны. Они могут применяться при проектировании управляемых систем разнообразного назначения, значительно повышая эффективность их функционирования.
Библиографическая ссылка
Кучерова В.Ю., Петьков В.Н., Артамонов П.А. ПРИМЕНЕНИЕ МЕТОДА АКАР ДЛЯ РЕШЕНИЯ ЗАДАЧИ СТАБИЛИЗАЦИИ СОСТОЯНИЙ РАВНОВЕСИЯ ТИПОВЫХ НЕЛИНЕЙНЫХ СИСТЕМ // Фундаментальные исследования. 2016. № 5-2. С. 264-268;URL: https://fundamental-research.ru/en/article/view?id=40286 (дата обращения: 21.07.2026).