


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
ABOUT ONE MODIFICATION OF THE PROBLEM OF PLACEMENT OF THE ENTERPRISES WHEN PLANNING DEVELOPMENT OF BRANCH

Известно [5], что в задаче размещения предприятий при планировании развития отрасли имеется m пунктов (пункты производства), в которых расположены или могут быть размещены предприятия одной отрасли. Потребности в товаре, произведенном на этих предприятиях, известны в n пунктах (пункты потребления). Затраты по производству и транспортировке единицы продукта считаются также известными. Задача состоит в определении мест расположения новых предприятий, объемов производства и перевозок так, чтобы суммарные издержки были минимальны.
Многие задачи планирования сводятся к следующей задаче математического программирования (см., например, [8]). Требуется определить вектор x = (x1, x2, ..., xn), обращающий в минимум функцию

при условиях
 i = 1, 2, ..., m;
i = 1, 2, ..., m;
αj ≤ xj ≤ βj; j = 1, 2, ..., n.
Здесь целевая функция F(x) характеризует суммарные затраты производства, а условия являются балансными соотношениями между продукцией разных предприятий. Благодаря балансным соотношениям гарантируется требуемый объем производства предприятий и устанавливаются ограничения на объемы продукции каждого предприятия, порождаемые учитываемыми потребностями.
Особенностью описываемой задачи оказывается то, что целевая функция является кусочно-линейной функцией [8]. Более того, fj(xj) – выпуклые функции, а значит [6], они полиэдральные функции.
Помимо специфики задачи, приводящей к кусочно-линейному характеру оптимизируемого показателя качества, отметим также наличие и других причин, приводящих к подобному эффекту. Укажем здесь в качестве примеров [2] и переменную технологию производства, и экономию на масштабах производства, и некоторые особенности в технологии производств.
Таким образом, видно, что задачи размещения предприятий приводят к задачам кусочно-линейного программирования (КЛП). Основные положения КЛП можно найти в работах [8, 7, 3]. Отметим, что в упомянутых работах ограничения при оптимизации целевой функции рассматривались в виде неравенств. В данной статье речь идет о задаче планирования производства. Ограничения, которые возникают в таких задачах, как уже отмечалось, имеют вид балансных соотношений.
Цель данной работы – изучение задач КЛП с ограничениями-равенствами, адаптация метода линейной аппроксимации [4] к задаче КЛП с ограничениями отмеченного типа.
Постановка задачи. Решение в общем виде
Рассмотрим следующую задачу линейного программирования. Минимизировать функцию
 (1)
(1)
при следующих ограничениях:

 (2)
(2)
 (3)
(3)
где aij(x), bi(x) и cj(x) – некоторые кусочно-постоянные функции вектора x, принимающие для определенных значений переменной x разные значения.
Будем считать, что функции aij(x), bi(x) и cj(x) определены на одном и том же множестве  , и существует такое конечное разбиение
, и существует такое конечное разбиение  ,
,  , что в каждом подмножестве Gk эти функции постоянны, причем Gk и Gm, k ≠ m, могут пересекаться только по своим границам.
, что в каждом подмножестве Gk эти функции постоянны, причем Gk и Gm, k ≠ m, могут пересекаться только по своим границам.
В введении статьи приводилась задача, в которой коэффициенты зависели лишь только от одной компоненты вектора x и носили кусочно-линейный характер. Такая ситуация возникает [8] и в других случаях. Этот факт говорит о том, что в качестве областей Gk имеет смысл брать области типа параллелепипедов (очевидно, что это еще и упрощает описание поиска решения задачи). Поэтому потребуем следующих дополнительных условий на области G и Gk. Будем считать, что G – параллелепипед:

Таким образом, условие (3) можно не рассматривать. Пусть также каждое Gk является параллелепипедом, грани которого параллельны координатным гиперплоскостям. Более того, будем считать, что выполнено следующее требование: существует конечное разбиение параллелепипеда П, например

 ,
,
где  – набор параллелепипедов, на каждом из которых функции aij(x) являются постоянными. Аналогично можно представить
– набор параллелепипедов, на каждом из которых функции aij(x) являются постоянными. Аналогично можно представить

или

 ,
,
где  и
и  – конечные наборы параллелепипедов с постоянными bi(x) и cj(x) соответственно. Из этого следует, что существует конечное разбиение множества G = П на параллелепипеды
– конечные наборы параллелепипедов с постоянными bi(x) и cj(x) соответственно. Из этого следует, что существует конечное разбиение множества G = П на параллелепипеды
 ,
,
такое, что
 ,
,

а функции aij(x), bi(x) и cj(x) постоянны для каждого  . При этом соседние параллелепипеды
. При этом соседние параллелепипеды  и
и  пересекаются только по границе.
пересекаются только по границе.
Наконец, потребуем, чтобы в задаче (1)–(3) целевая функция z(x) и функции ограничений
 i = 1, 2, ..., m,
i = 1, 2, ..., m,
были выпуклыми функциями. Заметим, что такое ограничение обеспечивает непрерывность функций в П. Это следует из вида функций и непрерывности выпуклой функции во внутренности П [1].
Приведем условие, гарантирующее выпуклость функции
в  с
с  bk(x), постоянными в каждом из Пk. В этих обозначениях имеет место следующая
bk(x), постоянными в каждом из Пk. В этих обозначениях имеет место следующая
Теорема 1
Пусть непрерывная функция f(x) в любой точке x ∈ П удовлетворяет условию
 .q,
.q,
k ∈ S(x), x0 ∈ Пq.
Тогда функция f(x) – выпуклая функция.
Здесь  – скалярное произведение векторов a и b; S(x) – множество индексов таких, что из k ∈ S(x) следует x ∈ Пk.
– скалярное произведение векторов a и b; S(x) – множество индексов таких, что из k ∈ S(x) следует x ∈ Пk.
Доказательство. Прежде всего заметим, что, в силу характера рассматриваемой функции, выполнение свойства выпуклости достаточно доказать локально. Другими словами, если для каждой точки П существует некоторая окрестность, в которой рассматриваемая функция f(x) выпукла, то f(x) выпукла и в П.
Убедимся в том, что функция f(x) локально выпукла. Это свойство, в силу кусочно-линейности функции f(x), надо проверять только для точек, являющихся точками пересечения Пk. Пусть x – одна из таких точек, а x1, x2 лежат в достаточно малой окрестности x. Будем считать, что



Пусть α ∈ [0; 1] и, для определенности,

Тогда

Из непрерывности функции f(x) в точке x следует равенство

Используя это соотношение, получим
Теорема 1 доказана.
Можно выделить несколько методов решения задачи (1)–(3) в такой постановке.
Самым очевидным из них [2] является простой перебор всех параллелепипедов  , так как в каждом из
, так как в каждом из  мы будем иметь дело с обычной задачей линейного программирования с линейной целевой функцией и выпуклой областью допустимых решений. Для каждого
мы будем иметь дело с обычной задачей линейного программирования с линейной целевой функцией и выпуклой областью допустимых решений. Для каждого  находится оптимальный план xk, а решением задачи (1)–(3) является x*, для которого целевая функция минимальна:
находится оптимальный план xk, а решением задачи (1)–(3) является x*, для которого целевая функция минимальна:

Метод линейной аппроксимации
Для задачи (1)–(3) представляется возможным несколько сократить предложенную схему решения.
Возьмем более простую постановку задачи. Требуется минимизировать выпуклую функцию
 (1′)
(1′)
при линейных ограничениях
 (2′)
(2′)
где c(x) = (c1(x), c2(x), ..., cn(x)), ci(x) (i = 1, ..., n) кусочно-постоянные функции в  ,
,  – неотрицательный ортант Rn; A ? матрица размера m×n; b ? m-мерный вектор.
– неотрицательный ортант Rn; A ? матрица размера m×n; b ? m-мерный вектор.
Условие (2′) берется здесь вместо (2) и (3) для упрощения изложения. То же, что замена параллелепипеда П на  не уменьшает общности, объясняется существованием у функции z(x) непрерывного продолжения с П на
не уменьшает общности, объясняется существованием у функции z(x) непрерывного продолжения с П на  . В самом деле, пусть
. В самом деле, пусть  и x ∉ П. Пусть x = ak уравнение той грани параллелепипеда П, которую пересекает отрезок с концами в точках 0 и x (в дальнейшем такие отрезки будем отображать [0, x]). Очевидно, что точкой пересечения отрезка [0, x] с гранью является точка αkx/xk. Положим
и x ∉ П. Пусть x = ak уравнение той грани параллелепипеда П, которую пересекает отрезок с концами в точках 0 и x (в дальнейшем такие отрезки будем отображать [0, x]). Очевидно, что точкой пересечения отрезка [0, x] с гранью является точка αkx/xk. Положим

где λ есть произвольное положительное число.
Покажем, что функция  является выпуклой функцией в конусе K, образованном лучами, проведенными из нуля и пересекающими одну и ту же грань с уравнением x = αk. Возьмем две точки x1, x2 ∈ K/П. Обозначим через
является выпуклой функцией в конусе K, образованном лучами, проведенными из нуля и пересекающими одну и ту же грань с уравнением x = αk. Возьмем две точки x1, x2 ∈ K/П. Обозначим через 
 точки пересечения грани x = αk с отрезками [0, x1] и [0, x2] соответственно. В силу выпуклости функции z(x) на П имеем с α, α ∈ [0, 1],
точки пересечения грани x = αk с отрезками [0, x1] и [0, x2] соответственно. В силу выпуклости функции z(x) на П имеем с α, α ∈ [0, 1],
Таким образом, функция  является непрерывным продолжением с П на
является непрерывным продолжением с П на  функции z(x), выпуклым в конусах типа K.
функции z(x), выпуклым в конусах типа K.
Определим теперь субдифференциал функции

Имеет место
Теорема 2
Субдифференциал ∂z(x) функции z(x) имеет вид
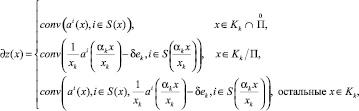
где convG ? выпуклая оболочка множества G;  ek ? вектор, k-я координата которого равна единице, а все остальные равны 0;
ek ? вектор, k-я координата которого равна единице, а все остальные равны 0;  – внутренность П.
– внутренность П.
Доказательство первой части теоремы можно найти в [7]. Соотношения же для множеств  получатся непосредственно с помощью формул из [1].
получатся непосредственно с помощью формул из [1].
Опишем теперь алгоритм метода линейной аппроксимации.
Рассмотрим конус Kk. Множество точек этого конуса можно рассматривать как образ  при отображении линейным оператором с матрицей Qk, т.е.
при отображении линейным оператором с матрицей Qk, т.е.  Таким образом, чтобы найти минимум функции z(x) в конусе Kk, нужно найти минимум функции z(QkyT) в
Таким образом, чтобы найти минимум функции z(x) в конусе Kk, нужно найти минимум функции z(QkyT) в  . Отметим также, что при этом формулы для субдифференциалов отображений z(x) и z(QkyT) связаны соотношением
. Отметим также, что при этом формулы для субдифференциалов отображений z(x) и z(QkyT) связаны соотношением 
Опишем теперь алгоритм метода линейной аппроксимации. Здесь, как уже показано, можно считать, что задача задана соотношениями (1′), (2′). Идея метода [1] заключается в том, что в любой допустимой точке xk функция z(x) аппроксимируется функцией zL(x), где zL(x) = z(xk) + g(xk)(y – xk), где g(xk) соответствующим образом выбранный вектор из множества ∂z(xk).
Отметим, что минимизация такой функции эквивалентна в смысле решения минимизации функции g(xk)yT при AyT = b, y ≥ 0. Обозначим решение yk.
Направление g(xk) естественно взять направлением наискорейшего спуска функции z(x) в точке xk. Оно задается вектором g(xk) ∈ –∂z(xk), лежащем на кратчайшем расстоянии от начала координат.
Далее с помощью направления dk = yk – xk получим точку xk+1 как решение задачи минимизации z(xk + τ(yk – xk)), τ ∈ [0, 1]. Все точки вида xk + τ(yk – xk), τ ∈ [0, 1] допустимы в силу выпуклости допустимого множества.
Пусть решение этой задачи есть xk+1. Если окажется, что g(xk+1)(yk+1 – xk+1)T > 0, то процесс продолжается дальше. Если же выполняется обратное неравенство, то в точке xk+1 выполняется условие Куна – Таккера и алгоритм завершает свою работу.
Выводы
Описана модификация задачи размещения предприятий при планировании развития отрасли в виде задачи кусочно-линейного программирования.
Для решения описанной задачи к ее условиям адаптирован метод линейной аппроксимации.
Библиографическая ссылка
Гаврилова М.О., Новоселова Ю.В., Севодин М.А. ОБ ОДНОЙ МОДИФИКАЦИИ ЗАДАЧИ РАЗМЕЩЕНИЯ ПРЕДПРИЯТИЙ ПРИ ПЛАНИРОВАНИИ РАЗВИТИЯ ОТРАСЛИ // Фундаментальные исследования. 2016. № 2-1. С. 125-129;URL: https://fundamental-research.ru/en/article/view?id=39893 (дата обращения: 27.06.2026).