


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
INVESTIGATION OF THE EFFECT OF THE ELECTRONIC STABILITY SYSTEM OF LIGHT COMMERCIAL VEHICLES BY THE SAFETY OF CURVILINEAR MOVEMENT

Причиной большого числа ДТП является человеческий фактор. Даже при обычных условиях движения водитель и автомобиль могут достигнуть своих физических пределов. Система динамической стабилизации (ESP) вносит значительный вклад в преодоление таких ситуаций, помогая водителю сохранить управляемость автомобиля в физических рабочих пределах. Данная система использует тормозную систему автомобиля и силовой агрегат для коррекции продольного и поперечного движения автомобиля в критических ситуациях [1].
Цель системы управления динамикой – сохранить три степени свободы автомобиля в плоскости дороги – линейную скорость vx, поперечную скорость vy и скорость ? вращения вокруг вертикальной оси – в контролируемых пределах [1].
Система ESP состоит из автомобиля как управляемой системы, датчиков, определяющих вводные переменные, исполнительных органов для коррекции тормозных, движущих и поперечных сил, а также иерархически структурированных контроллеров – контроллера поперечной динамики (высший уровень) и контроллеров колес (низший уровень) (рис. 1). Контроллер высшего уровня определяет заданные значения для контроллеров низшего уровня в виде моментов или скольжения или их изменений. Внутренние системные переменные, не измеряемые напрямую, такие как угол дрейфа ?, определяются при оценке условий движения [1].
Чтобы определить номинальное поведение, анализируются сигналы, соответствующие командам водителя. Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе и положения педали акселератора. При вычислении номинального поведения также учитывается используемый потенциал коэффициента сцепления шин с дорогой и скорость автомобиля. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колес, датчика поперечного ускорения, датчика скорости вращения вокруг вертикальной оси и датчика давления в тормозной системе. Затем вычисляется момент относительно вертикальной оси, который необходим для приближенного приведения параметров действительного состояния к параметрам требуемого состояния [1].
Для определения стабилизирующих вмешательств важно не только знать сигналы от датчиков угловых скоростей колес vWhl, давление на впуске рAdm, скорость вращения вокруг вертикальной оси ?, поперечное ускорение ay, угол поворота рулевого колеса ? и крутящий момент двигателя, но и ряд других внутренних системных переменных, которые могут быть измерены косвенно. К ним, к примеру, относятся силы, действующие на шины в продольном, поперечном и нормальном направлениях (Fх, Fу и FN), линейная скорость ?x, значения относительного скольжения шин ?i, угол бокового увода колес ? на одной оси, угол дрейфа ?, поперечная скорость автомобиля vy и коэффициент сцепления ?. Они определяются по сигналам датчиков на базе вычислительных моделей. Линейная скорость автомобиля vx имеет ключевую важность для всех контроллеров бокового увода колес и поэтому должна вычисляться с отклонением в несколько процентов для обеспечения стабилизирующего вмешательства в необходимой степени [1].
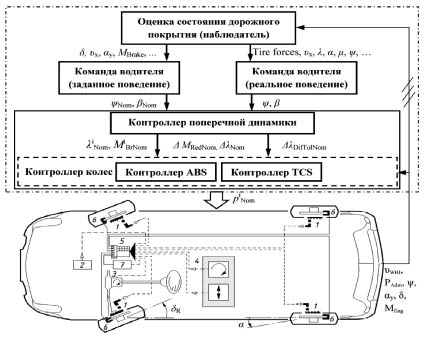
Рис. 1. ESP – общая система управления; 1 – датчики угловых скоростей колес; 2 – датчик тормозного давления (встроен в гидравлический блок); 3 – датчик угла поворота рулевого колеса; 4 – датчик вращения вокруг вертикальной оси со встроенным датчиком поперечного ускорения; 5 – гидравлический блок (гидравлический модулятор) ESP с ЭБУ; 6 – тормоза колес; 7 – ЭБУ двигателя; ?iNom – номинальная величина относительного скольжения шины на колесе i; MiBrNom – номинальный тормозной момент на колесе i; ?MRedNom – приращение номинального момента двигателя; ??DifTolNom – номинальное изменение допустимой разности в относительном скольжении приводной оси (осей)
Стоит отметить, что c 1 ноября 2014 года все новые легковые автомобили массой до 3,5 тонн и легкие коммерческие машины, продаваемые на территории Евросоюза, обязаны иметь систему динамической стабилизации в качестве базового оснащения. В 2015 году это требование распространится и на другие виды транспорта. С 1 января 2016 г. все новые автомобили, не проходившие ранее оценку соответствия в РФ, должны быть оснащены системой ABS и ESP. В России пока нет специалистов и оборудования, которые смогли бы произвести и настроить данную систему, поэтому отечественные автопроизводители пользуются услугами именитых корпораций (Bosch, Wabco, Knorr-Bremse и др.).
Исследованиям систем динамической стабилизации посвящены работы В.Г. Дыгало, Е.С. Балясникова, В.В. Баева, М.П. Малиновского и др. Сложная дорожно-транспортная ситуация в России показывает, что уже в настоящее время существует острая необходимость в соответствующих исследованиях и научно-практических работах, полученные знания и результаты могут быть применены в разработке отечественных импортозамещающих систем [6].
Работа систем ЭКУ регламентируется международными нормативными до кументами:
– Глобальные технические правила № 8 «Электронные системы контроля устойчивости» (приняты 26 июня 2008 г.).
– Правила № 13-Н ЕЭК ООН «Торможение легковых автомобилей», Дополнение 7.
– Правила № 13-11 ЕЭК ООН «Торможение грузовых автомобилей и автобусов».
При испытании систем динамической стабилизации используется маневр по усеченной синусоиде, регламентированный в глобальных технических правилах № 8. На удорожании процесса проведения испытаний сказывается необходимость существенного вложения средств в полигоны для исследования динамики автомобиля с автоматизированными системами (наличие специально подготовленной площадки, оборудование автомобиля рулевым роботом и системами GPS) [3, 4, 5]. На данный момент в Российской Федерации этим требованиям соответствует только Научно-исследовательский центр по испытаниям и доводке автомототехники ФГУП «НАМИ». В связи с этим было принято решение об исследовании криволинейного движения по ГОСТ 31507-2012 «Автотранспортные средства. Управляемость и устойчивость. Технические требования. Методы испытаний», проведя испытания «вход в поворот» и «переставка».
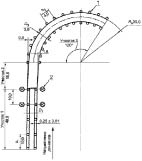
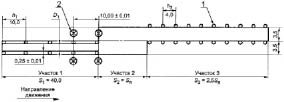
При испытаниях «вход в поворот 35 м» и «переставка 20 м» выполняют заданные разметками маневры (соответственно рис. 2, а и б) при постепенном увеличении скорости от заезда к заезду. В процессе испытаний регистрируют скорость АТС на участке 1 и отмечают заезды, в которых происходит отрыв колес от поверхности дороги или выход их за пределы размеченного коридора [2].
Объект исследования – цельнометаллический грузовой коммерческий автомобиль Renault Master 2.3 dci 125. Данное транспортное средство оснащено системой ESP Bosch 9.0. В этой модификации датчики измерения угловой скорости, продольного и поперечного ускорения встроены в блок управления и способны выдерживать высокую температуру в моторном отсеке.
a б
Рис. 2. Разметки маневров по ГОСТ 31507-2012: а – вход в поворот 35 м; б – переставка 20 м
Настоящее исследование предусматривает проведение практического эксперимента, целью которого является изучение поведения автомобиля, оснащенного системами обеспечения курсовой устойчивости, в условиях криволинейного движения и определение моментов срабатывания системы ЭКУ и степени её влияния на динамику движения.

Рис. 3. Принципиальная схема соединения измерительной аппаратуры
а в
б г
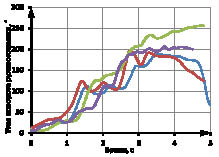
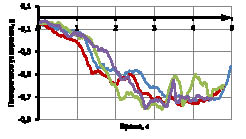
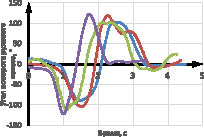
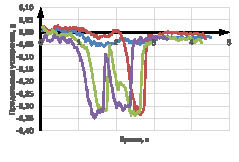
Рис. 4. Результаты испытания «вход в поворот 35 м»: а – график угла поворота рулевого колеса; б – график скорости рыскания; в – график продольного ускорения; г – график поперечного ускорения; синяя линия – скорость в коридоре 1 составляла 55 км/ч (ESP не сработало); красная – 57,7 км/ч (ESP не сработало); фиолетовая – 59,2 км/ч (ESP сработало); зеленая – 63 км/ч (ESP сработало)
Испытания проводились на полигоне ОАО ГАЗ «Березовая пойма». Исследования выполнены при финансовой поддержке Министерства образования и науки РФ в рамках проекта по договору № 02.G25.31.0006 от 12.02.2013 г. (постановление Правительства Российской Федерации от 9 апреля 2010 года № 218). Экспериментальные исследования выполнены с использованием измерительного оборудования Центра коллективного пользования НГТУ «Транспортные системы».
Во время выполнения маневров «вход в поворот 35 м» и «переставка 20 м» производилась запись данных об угле поворота рулевого колеса оборудованием Kistler Automotive GmbH (угол поворота – ±1250°, погрешность – ±0,1 %), скорость движения т.с фиксировалась при помощи прибора RacelogicVBOX3i 100 Hz Data Logger (абсолютная погрешность ±0,1 км/ч, абсолютная погрешность измерения расстояния ±0,2 %), для измерения скорости рыскания и продольных, поперечных ускорений использовался инерционный сенсор IMU04 Racelogic Ltd. (диапазон измерений: угловая скорость ±450°/с; ускорение ±5 g; погрешность измерений: угловая скорость – 0,014°/с; ускорение – 0,00015 g). В начале и конце движения ручным триггером ставилась временная метка.
Принципиальная схема соединения измерительного оборудования представлена на рис. 3.
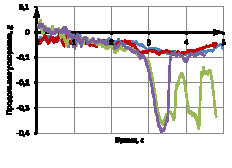
При выполнении маневра «вход в поворот 35 м» порог срабатывания системы динамической стабилизации составляет 58–59 км/ч (рис. 4). По характеру изменения угла поворота рулевого колеса (рис. 4, а) и скорости рыскания (рис. 4, б) можно сделать вывод, что при данном испытании включалась особая функция ESP – RMF – подавления опрокидывания. Система ЭКУ, подтормаживая колеса (рис. 4, в), уменьшала критическое поперечное ускорение (рис. 4, г) и скорость вращения вокруг вертикальной оси (рис. 5, в), таким образом, не происходил отрыв.
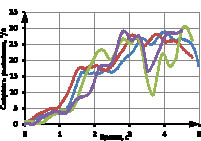
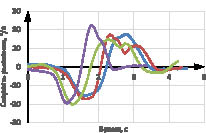
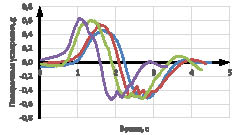
Произведя анализ графиков (рис. 5), можно сделать вывод, что при маневре «переставка 20 м» срабатывал контроллер поперечной динамики. В данном испытании (в отличие от «входа в поворот 35 м») кривые угловой скорости вращения вокруг вертикальной оси (рис. 5, б) повторяют характер изменения угла поворота рулевого колеса (рис. 5, а), таким образом, сохранялась курсовая устойчивость, т.е. автомобиль продолжал двигаться по траектории, заданной водителем. Порог срабатывания системы ЭКУ при испытании «переставка 20 м» составил 60–65 км/ч. ESP, подтормаживая колеса (рис. 5, в), корректировала поперечное ускорение (рис. 5, г), таким образом, восстанавливая устойчивость.
Результаты измерений представлены на рис. 4 и 5.
Данное исследование было проведено в сухую погоду на сухом асфальте, как и предусмотрено в ГОСТ 31507-2012. Интерес представляют испытания при аналогичных режимах движения, но по мокрому асфальту, дороге с низким коэффициентом сцепления. Анализ режимов системы динамической стабилизации в данных условиях может являться дальнейшим продолжением выполненной работы.
а в
б г
Рис. 5. Результаты испытания «переставка 20 м»: а – график угла поворота рулевого колеса; б – график скорости рыскания; в – график продольного ускорения; г – график поперечного ускорения; синяя линия – скорость в коридоре 1 составляла 60 км/ч (ESP не сработало); красная – 65 км/ч (ESP сработало); зеленая – 77 км/ч (ESP сработало); фиолетовая – 84 км/ч (ESP сработало)
Библиографическая ссылка
Вашурин А.С., Мошков П.С., Трусов Ю.П., Торопов Е.И., Тумасов А.В. ИССЛЕДОВАНИЕ ВЛИЯНИЯ ЭЛЕКТРОННОЙ СИСТЕМЫ ДИНАМИЧЕСКОЙ СТАБИЛИЗАЦИИ ЛЕГКОГО КОММЕРЧЕСКОГО АВТОМОБИЛЯ НА БЕЗОПАСНОСТЬ КРИВОЛИНЕЙНОГО ДВИЖЕНИ // Фундаментальные исследования. 2015. № 12-4. С. 665-670;URL: https://fundamental-research.ru/en/article/view?id=39601 (дата обращения: 29.07.2026).