


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
THE DEFINITION OF MINIMUM NECESSARY TIME WORK SIDE FRICTION

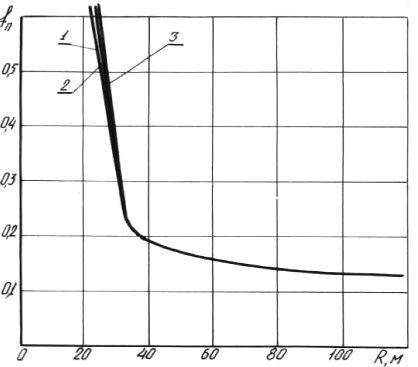
Равномерное движение при заданной кривизне траектории движения должно обеспечиваться двигателем и механизмом поворота. Только при этом осуществим указанный характер движения. С другой стороны, мощность двигателя определяется по заданным условиям прямолинейного движения. И при этом остается неизвестным: достаточна ли она для осуществления равномерного криволинейного движения в любых условиях или существуют определенные ограничения поворотливости тракторов. Эти ограничения могут, очевидно, касаться поворотов с малыми радиусами, требующих повышенных затрат энергии для преодоления возросших внешних сопротивлений (графики на рис. 1 и 2).
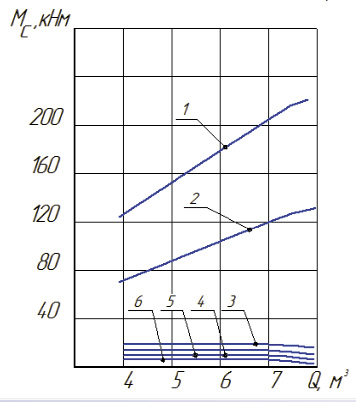
а б
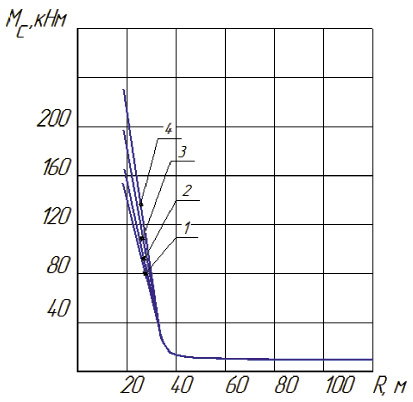
Рис. 1. Изменение момента сопротивления Мс при движении трактора ТДТ-55М: а – зависимость от рейсовой нагрузки: 1 – R = 20 м; 2 – R = 25 м; 3 – R = 35 м; 4 – R = 60 м; 5 – R = 85 м; 6 – R = 110 м; б – зависимость от радиуса поворота: 1 – Q = 4 м3; 2 – Q = 5 м3; 3 – Q = 6 м3; 4 – Q = 8 м3
а б
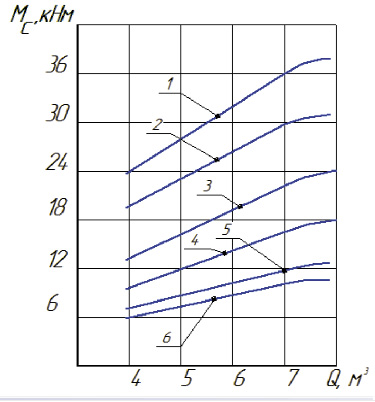
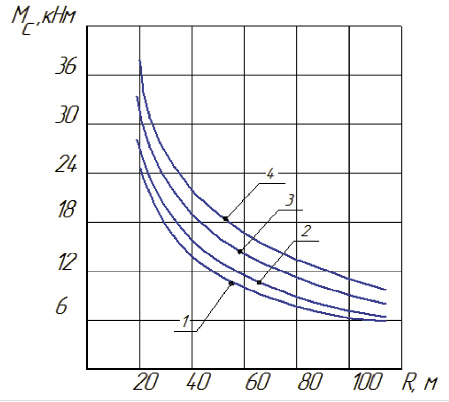
Рис. 2. Изменение момента сопротивления Мс при движении трактора ТБ-1М: а – зависимость от рейсовой нагрузки: 1 – R = 20 м; 2 – R = 25 м; 3 – R = 35 м; 4 – R = 60 м; 5 – R = 85 м; 6 – R = 110 м; б – зависимость от радиуса поворота: 1 – Q = 4 м3; 2 – Q = 5 м3; 3 – Q = 6 м3; 4 – Q = 8 м3
Поэтому для определения времени работы бортовых фрикционов необходимо установить возможность равномерного поворота, а также скорость равномерного движения, обеспечиваемую двигателем и механизмом поворота при различных радиусах кривизны траектории. Время работы бортовых фрикционов при равномерном повороте трактора на 1° в разных условиях эксплуатации может существенно отличаться, но при наложении ряда ограничений, таких как: отсутствие буксования на забегающей гусенице, работа двигателя на внесшей характеристике, отсутствие связи между двигателем и отстающей гусеницей, продолжительность включения бортфрикционов будет стремиться к некоторому пределу, который можно назвать минимальным временем работы.
Для оценки реальной поворотливости трактора необходим параметр, который позволил бы, используя тягово-динамическую характеристику машины, оценить возможность равномерного поворота подобно тому, как это решается при анализе равномерного прямолинейного движения. В качестве такого параметра можно использовать предложенную в [1, 2] потребную удельную силу тяги на гусеницах при повороте:
![]()
![]() (1)
(1)
где fп2, fп1 – удельные силы тяги на забегающей и отстающей гусеницах; P1 и P2 – силы тяги на забегающей и отстающей гусеницах; Ga – полный вес транспортной системы.
Так как по условию связь между двигателем и отстающей гусеницей через бортовой фрикцион отсутствует, потребная сила тяги при повороте fп = fп2.
Общее выражение потребной силы тяги на забегающей гусенице получаем, написав уравнение моментов относительно полюса поворота О1 (рис. 3 и 4)
 (2)
(2)
(момент от поперечной составляющей крюковой силы тяги входит в Mс).
Тогда в общем виде потребная удельная сила тяги трактора:
![]() (3)
(3)
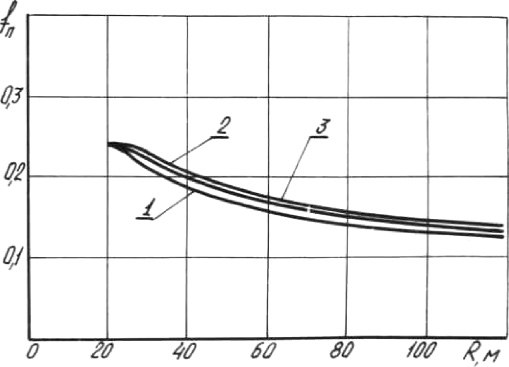
На рис. 5 приведены графики изменения потребной удельной силы тяги в зависимости от радиуса поворота для тракторов ТДТ-55М (рис. 5, а) и ТБ-1М (рис. 5, б) при различных рейсовых нагрузках.
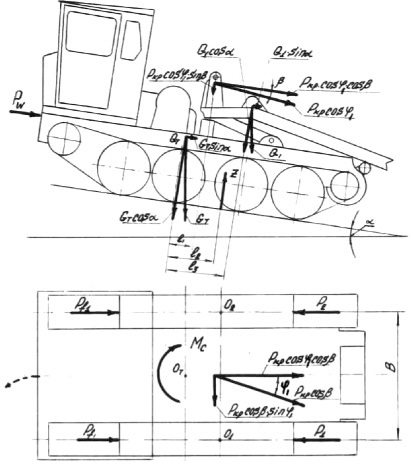
Рис. 3. Силы, действующие на трактор с тросовым оборудованием при движении
Графики построены по расчетным данным при средних значениях показателей условий эксплуатации в северо-западной лесоэксплуатационной зоне при движении по горизонтальной площадке. Моменты сопротивления приняты расчетные по рис. 1 и 2.
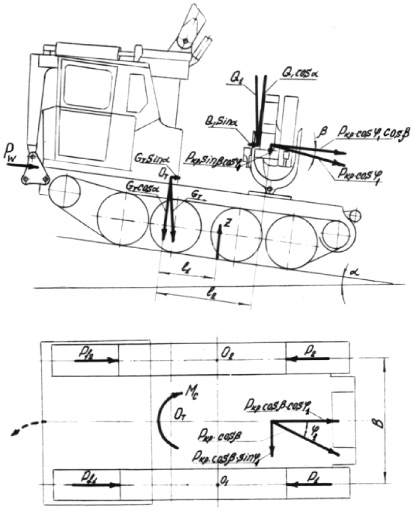
Рис. 4. Силы, действующие на бесчокерный трактор при движении
По аналогии с прямолинейным движением введем динамический фактор поворота:
![]() (4)
(4)
где Pa2 – сила тяги, развиваемая двигателем трактора на забегающей гусенице при повороте, при работе двигателя на внешней характеристике.
При таком условии равномерного поворота выразится равенством
fп = Dп. (5)
а б
Рис. 5. Потребная удельная сила тяги при равномерном повороте тракторов ТДТ-55М (а) и ТБ-1М (б): 1 – Q = 4 м3; 2 – Q = 6 м3; 3 – Q = 8 м3
Сравнение построенных в одном масштабе графиков fп = f(R) и Dп = f(V) позволит оценить возможность равномерного поворота, а также определить окружные скорости при различных радиусах поворота. Такое сравнение проведено на рис. 6 для трактора ТДТ-55М и рис. 7 для ТБ-1М, построенных в виде номограмм при весе транспортной системы ТДТ-55М: Ga = 140 кН (Q = 6 м3), ТБ-1М: Ga = 154 кН (Q = 6 м3).
График Vп = f(R) на номограммах позволяет определить окружную скорость равномерного поворота тракторов в зависимости от радиуса и по формуле
![]() (6)
(6)
и рассчитать минимальное время работы бортовых фрикционов при повороте на 1° тракторов. Полученные результаты расчета по (6) показаны в виде графиков на рис. 6 и 7. Из приведенных графиков видно, что в диапазоне радиусов поворота R = 20…60 м трактор ТБ-1М имеет меньшее время работы бортовых фрикционов, чем ТДТ-55М в диапазоне R = 60…120 м, и несколько меньше время у трактора ТДТ-55М, а при радиусах поворота R > 120 м тракторы ТДТ-55М и ТБ-1M имеют одинаковое время работы фрикционов.
Использование номограмм (рис. 6 и 7) позволяет также оценить тяговые качества тракторов из условия [1]: чем меньше предельный радиус равномерного поворота, тем выше тяговые качества трактора. Номограмма позволяет вести такое сравнение и по передачам.
Из рис. 6 и 7 видно, что меньший радиус поворота имеет трактор ТБ-1М при одинаковых условиях эксплуатации с трактором ТДТ-55М. Это показывает более высокие тяговые качества бесчокерного трактора с поворотным коником по сравнению с трактором в щитовом исполнении. Из номограмм также видно, что трактор ТБ-1М может во всем диапазоне радиусов поворота двигаться на 1 и 2 скоростях, и минимальный радиус равномерного поворота на этих скоростях в 1,35–1,5 раза меньше, чем у трактора ТДТ-55М. На 3 передаче трактор ТБ-1М также имеет преимущество при повороте – минимальный возможный радиус поворота в 1,1–1,15 раза меньше, чем у трактора ТДТ-55М. И только на 1У передаче трактор ТБ-IM имеет несколько худшие тяговые качества по сравнению с ТДТ-55М – минимально возможный радиус на 1У передаче 1,3–1,35 раза выше, чем у трактора ТДТ-55М.
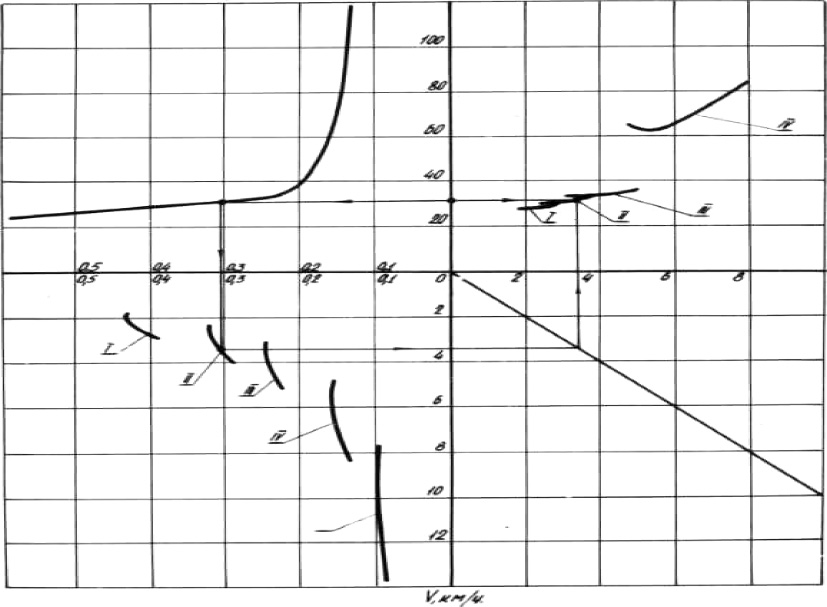
Рис. 6. Номограмма для определения возможной окружной скорости и зависимости от радиуса поворота трактора ТДТ-55М
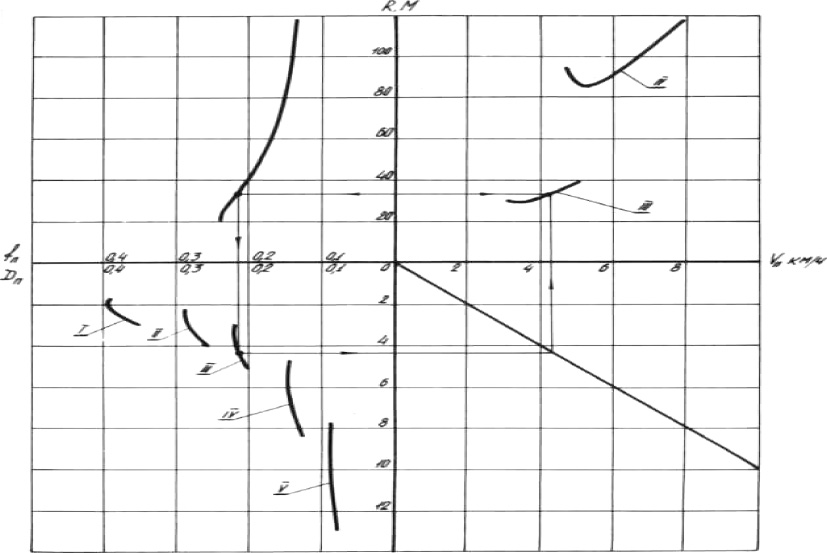
Рис. 7. Номограмма для определения возможной окружной скорости в зависимости от радиуса поворота трактора ТБ-1М
Выводы
1. Прогнозирование использования бортовых фрикционов трелевочных тракторов целесообразно вести графоаналитическим способом с учетом показателей удельной силы тяги и динамического фактора поворота, которые могут быть определены по выражениям (1) и (4).
2. При равных рейсовых нагрузках более высокими тягово-скоростными качествами по условию меньшего радиуса равномерного поворота имеет бесчокериый трактор. Минимально возможный радиус поворота ТБ-1М в 1,35–1,5 раза меньше, чем у ТДТ-55М.
3. При равных рейсовых нагрузках минимальное время использования бортфрикционов ТБ-1М при поворотах с радиусами R < 60 м в 1,1–2, раза меньше, R = 60–120 м в 1,1–1,5 раза больше, чем у ТЛТ-55М; при больших радиусах поворота время работы фрикционов у тракторов одинаковое.
4. Указанные выше преимущества бесчокерного трактора по сравнению с трактором с тросовым оборудованием обусловлены наличием поворотного коника, благодаря которому уменьшается величина момента сопротивления повороту и средняя величина силы сопротивления от крюковой силы тяги.
Рецензенты:
Павлов А.И., д.т.н., профессор кафедры лесных, деревообрабатывающих машин и материаловедения, ФГБОУ ВПО «Ухтинский государственный технический университет», г. Ухта;
Александров В.А., д.т.н., профессор кафедры лесных, деревообрабатывающих машин и материаловедения, ФГБОУ ВПО «Ухтинский государственный технический университет», г. Ухта.
Библиографическая ссылка
Шоль Н.Р., Тимохова О.М., Будевич Е.А., Снопок Д.Н. ОПРЕДЕЛЕНИЕ МИНИМАЛЬНОГО НЕОБХОДИМОГО ВРЕМЕНИ РАБОТЫ БОРТОВЫХ ФРИКЦИОНОВ // Фундаментальные исследования. 2015. № 11-5. С. 942-946;URL: https://fundamental-research.ru/en/article/view?id=39538 (дата обращения: 11.07.2026).