



Системы управления (СУ) многофункциональных робототехнических систем (РТС) автоматической подачи тепловыделяющих сборок (ТВС) являются многорежимными гибридными (логико-динамическими) системами [5, 2], обеспечивающими решение нескольких задач управления функциональным движением исполнительных устройств (ИУ) в условиях технологической неопределённости. Многорежимные динамические СУ РТС являются системами с переключением целей, структуры и параметров алгоритмов программно-логического управления, что затрудняет анализ и синтез подобных систем. Это приводит к целесообразности применения: различных вариантов метода декомпозиции [8]; разрывных (кусочно-непрерывных и релейных) управлений, в т.ч. при наличии запаздывания в структуре обратной связи (нелинейных систем с последействием) [8, 10]; нелинейной коррекции [7, 3]; адаптивных систем с разнотемповыми движениями и переменной структурой [9]; основанных на событиях и логических правилах организации переключений методов интеллектного [1] и интеллектуального управления [4].
Реализация алгоритмов и структур систем управления РТС при выполнении транспортных, измерительных, сборочных и других технологических операций предъявляет высокие и достаточно противоречивые требования к электроприводам (ЭП) исполнительных устройств (ИУ). Значительная часть этих требований может быть устранена совершенствованием структуры электроприводов, которая должна обеспечивать возможность автономного и координированного регулирования перемещений, сил и моментов применением позиционно-силового управления [3, 6] при условии обеспечения высокой точности позиционирования без перерегулирования и плавности перемещения рабочего органа ИУ при переменных нагрузках и моментах инерции.
В данной работе в качестве одного из путей обеспечения эффективной работы ЭП в подобных условиях рассматривается применение ЭП с переменной структурой (рис. 1). Если при отработке малых рассогласований оптимальное качество регулирования достигается применением линейных ПИ и ПИД- регуляторов положения (ЛРП), то при отработке больших значений сигналов рассогласования, существенно превышающих величину линейной зоны, или других технологических ограничений целесообразно с помощью логического переключающего устройства (ЛПУ1) перевести процесс регулирования на использование далее рассматриваемых нелинейных регуляторов положения (НРП) [7, 3, 6].
При свободном движении ИУ РТС силовая обратная связь ЭП с помощью ЛПУ2 разомкнута и привод работает в режиме позиционного управления. При контакте ТВС с контейнером с помощью ЛПУ2 замыкается силовая обратная связь. Обратная связь по положению размыкается, и ЭП работает в режиме управления силовым взаимодействием ТВС с контейнером.
Здесь приняты следующие обозначения: ВЭП – вентильный электропривод; ЛРП и НРП – линейный и нелинейный регуляторы положения; РСк – регулятор скорости; РС – регулятор силы; РТ – регулятор тока; ШИМ – широтно-импульсный модулятор; ДЗ – дифференциатор знака; ЛПУ1...ЛПУ3 – логические переключающие устройства; КМ – матрица силовых ключей; М – исполнительный двигатель; ДТ – датчик тока; ДПР – датчик положения ротора; ДСк – тахогенератор; ДП – датчик положения; F(DS) – нелинейность типа «упор»; СМ – матрица жёсткости; ДС – датчик силы.
В качестве базовой компоненты ЭП ИУ РТС с независимым позиционно-силовым управлением рассматривался регулируемый ВЭП в виде двуконтурной САР подчинённого регулирования скорости. Регуляторы скорости и тока реализуют ПИ-закон. Тип привода – ЭПБ-2 с двигателем 2ДВУ165М. В двигатель встроен переключатель ПДФ-8, имеющий датчик положения ротора, датчик скорости и импульсный датчик положения. Датчик тока – шунт с фильтрацией сигнала. Замыкание по положению выполняется в микроЭВМ контроллера привода с программной реализацией регулятора положения.
Динамика автономного перемещения ИУ рассматривалась на примере вентильного ЭП с широтно-импульсной модуляцией (ШИМ) методом математического моделирования с последующим проведением экспериментальных работ.
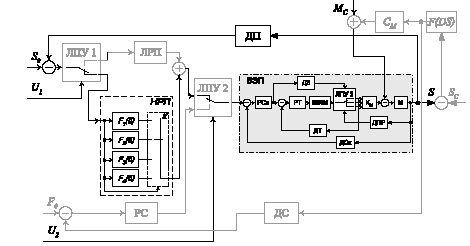
Рис. 1. Функциональная схема двухканального вентильного ЭП с независимым позиционно-силовым управлением
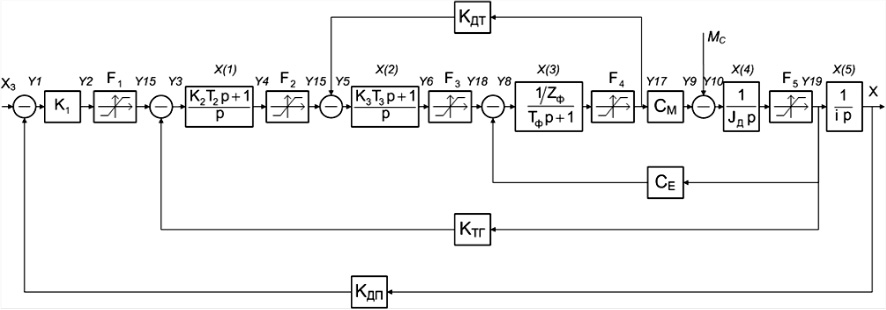
Рис. 2. Структурная схема вентильного ЭП с линейным регулятором положения
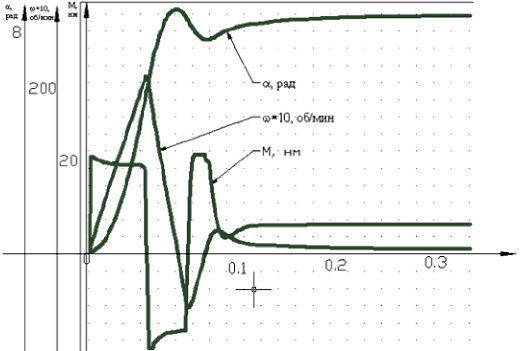
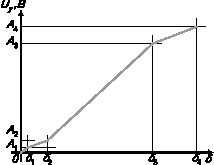
Рис. 3. Переходные характеристики позиционного привода с линейным регулятором
Структурная схема вентильного позиционного ЭП с учетом ограничений F1-F5 представлена на рис. 2. При моделировании приняты значения коэффициентов, ориентированные на конкретный привод и реальный технологический процесс, для которого в дальнейшем проведены экспериментальные исследования. Вентильный двигатель 2ДВУ165М имеет следующие параметры: PM = 2,7 кВт; МН = 17 Нм; NН = 2000 об/мин; IН = 12 А; Im = 25 А. Коэффициенты структурной схемы имеют следующие значения: К1 = 1,0; К2 = 700; К3 = 5500; КДТ = 0,4 в/а; КТГ = 0,0477 в/(рад?с); КДП = 1,0; Т2 = 0,01 с; Т3 = 0,01 с; ТФ = 0,0088 с; zФ = 1,0 Ом; СЕ = 1,4; СМ = 1,4; JД = 0,0051 кг?м2; i = 1. Цифровое моделирование проводилось с использованием пакета MATLAB. Переходная характеристика модели привода представлена на рис. 3.
Численное интегрирование дифференциальных уравнений осуществлялось методом Рунге – Кутты V с заданной точностью d = 1?e–4 с автоматическим выбором шага интегрирования. За номинальную добротность привода принято ее паспортное значение КV = 75 c1. Этому значению соответствует коэффициент передачи регулятора положения К1 = 1. Амплитуда скачка угла составляла a = 8,5 рад. Привод имеет перерегулирование по скорости 33 %. По положению хотя и нет абсолютного перерегулирования относительно заданного значения угла, но характер подхода к заданному положению колебательный. Перерегулирование по положению будем рассматривать относительно амплитуды входа системы в линейную зону, что на графиках соответствует изменению знака ускорения. При этом переходный процесс по положению рассматривается и оценивается как отработка скачка угла с начальными условиями g = ? = ?л?1(t); ![]()
![]()
Для исследуемой системы согласно переходной характеристике имеем: ?л = 6 рад, ?л = 2000 об/мин, ?л = 48300 с–2; относительное перерегулирование, определённое при нулевом и максимальном значении скорости на этом участке составляет 0,75 рад или 12,5 %; общее время позиционирования tП = 0,22 с; время переходного процесса tПП = 0,168 с.
Линейный регулятор не обеспечивает асимптотической устойчивости программного движения ИУ РТС, причем переходные процессы при отработке перемещений могут иметь колебательный характер, что недопустимо при работе с субтильными объектами типа ТВС. Кроме того, неизбежные в процессе эксплуатации возмущения и неопределённости (изменения массо-инерционных характеристик, дрейф коэффициентов трения и упругих деформаций и т.п.) приводят к снижению точности позиционирования, уменьшению быстродействия, а в ряде случаев и к аварийным ситуациям.
Это приводит к целесообразности применения методов: декомпозиции [8], разрывных (кусочно-непрерывных и релейных) управлений [8], нелинейной коррекции [7, 3]; адаптивных систем с разнотемповыми движениями и переменной структурой [9], интеллектного [1] и интеллектуального управления [4].
В настоящей работе в силу организационно-технических ограничений рассматривался только вариант применения нелинейного логико-динамического закона регулирования положения, реализуемого введением дополнительного нелинейного регулятора положения (НРП) [6]. На первом этапе рассматривались четыре варианта структур ЭП с различными местами включения нелинейного РП: в цепи входного сигнала So; в канале ошибки позиционного контура ЭП; параллельно линейному РП (параллельная коррекция); параллельно регулятору скорости или элементам обратных связей скоростного контура. В результате проведенного анализа структур можно сделать следующие выводы: показана принципиальная возможность повышения качества переходных процессов при отработке скачкообразного входного воздействия введением дополнительного функционала (нелинейного корректирующего звена) во внутренний контур системы; желаемую переходную характеристику проще всего можно получить включением нелинейного регулятора НРП в канал ошибки позиционного контура ЭП.
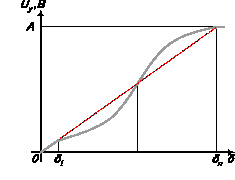
Рекомендуется характеристика нелинейного регулятора, состоящая из трёх участков: параболы, участка типа «насыщение» и зоны нечувствительности, определяемой значением критической скорости характеристики «сухое» трение. Наиболее приемлемой характеристикой, обеспечивающей поставленные требования в этом режиме, является характеристика, представленная на рис. 4, а и образованная совокупностью двух составляющих – постоянной и переменной:
![]()
где ![]()
?K = (0,1...0,2)K0;
?2(t) = ?(t) – ?1;
![]()
Характерные значения ошибок выбираются в следующих соотношениях: ?л = (0,8…1,0)??к; ?1 = (0,05…0,1)??л. Положительный эффект даёт и введение зоны нечувствительности ? = (0,3…0,5)??1. Практически аналогичные результаты можно получить, используя характеристику K = F(?) с четырьмя опорными точками, представленную на рис. 4, б.
а б
Рис. 4. Характеристики нелинейного регулятора положения
Нелинейный регулятор может быть реализован как программным путём на уровне управляющей программы цифрового привода, так и аппаратным в виде дополнительного модуля с программируемой памятью.
Регулятор НРП содержит набор линейных функций позиционной ошибки Fi(?) и аналоговый переключатель К (рис. 1), формирующий желаемую характеристику регулятора из заданного набора функций по величине рассогласования d. Аналогичным образом может быть реализован и нелинейный регулятор силы в канале управления силой, импедансом и податливостью как при действии геометрических и кинематических связей, так и сингулярных конфигураций.
Исследования вентильного ЭП с НРП выполнены цифровым моделированием.
Результаты моделирования представлены на рис. 5. Переходный процесс имеет апериодический характер, без перерегулирования и колебаний, а время переходного процесса уменьшилось до 0,18 с. Таким образом, использование нелинейного регулятора положения в позиционном приводе позволяет полностью исключить моментные и скоростные перегрузки при работе с хрупким и субтильным объектом. В условиях действия внешних связей, вызванных нестационарностью расположения контейнеров с ТВС, неполнозаданностью координат ячеек в контейнере и нестабильностью формы самого ТВС, позиционное управление по координатам X и Y РТС должно быть дополнено электрическими или электромеханическими силовыми обратными связями с целью регулирования импеданса и податливости ЭП ИУ [3, 6].
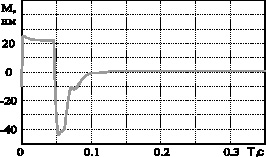
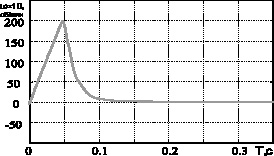
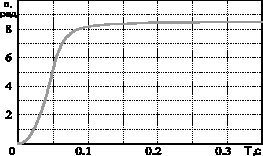
Рис. 5. Переходные характеристики позиционного ЭП с нелинейным регулятором положения
Работа выполнена при финансовой поддержке РФФИ (проект № 13-08-01364).
Рецензенты:
Коростелев В.Ф., д.т.н., профессор, заведующий кафедрой «Автоматизация технологических процессов», Владимирский государственный университет, г. Владимир;
Морозов В.В., д.т.н., профессор, заведующий кафедрой «Технология машиностроения», Владимирский государственный университет, г. Владимир.