


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
THE MODULE OF IMITATING MODELLING OF OPERATING MODES OF DIESELS OF THE AUTOMATED SYSTEM OF TESTS

Структурные схемы наглядно показывают взаимодействие элементов, входящих в систему. При расчете объект управления, в данном случае дизельный двигатель, целесообразно представить в виде структурной схемы, опираясь на конструктивные особенности основных составных элементов [1]. Структурная схема, для получения нагрузочной характеристики, должна включать в себя параметры управляющих воздействий. Используя математическую запись модели дизельного двигателя [2, 3], получим структурную схему, позволяющую смоделировать переходную характеристику при набросе нагрузки на вал двигателя и максимальном перемещении рейки ТНВД.
В структуре среды имитационного моделирования можно выделить 6 функциональных модулей (рис. 1):
– модель двигателя;
– модуль взаимодействия со средой задания технологии испытания дизельных двигателей;
– модуль графического отображения и взаимодействия визуальных блоков;
– транслятор визуальных блоков во внутреннее представление модели;
– математический аппарат, производящий численные вычисления;
– модуль взаимодействия с внешней памятью.
Модель исследуемой динамической системы задается с помощью специальных графических блоков. Взаимодействие блоков между собой происходит при помощи однонаправленных линий связи. Каждый блок инкапсулирует в себе свойство того или иного физического объекта, имитируя его поведение. Для того чтобы создать имитационную модель исследуемой динамической системы, необходимо с помощью элементарных визуальных блоков и линий связи задать функциональную схему системы. В разработанной среде имитационного моделирования имитационная модель описывается при помощи графического языка моделирования, включающего в себя пять основных элементов: Линия связи, Блок «Сигнал», Блок «Cумматор», Блок «Функция», Блок «Результат».
Элементы графического языка моделирования имеют определенные свойства, которые являются общими для всех. Для учета этих свойств и облегчения процесса проектирования был разработан обобщающий абстрактный элемент графического языка, включающий в себя общие закономерности поведения всех элементов, т.е. в терминах объектно-ориентированного программирования он является родителем для всех элементов (рис. 2).
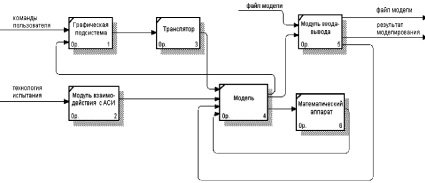
Рис. 1. Структура среды имитационного моделирования
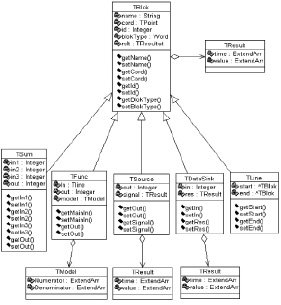
Рис. 2. Диаграмма классов элементов графического языка
На диаграмме классов (рис. 2) класс TBlok является обобщающим абстрактным элементом для остальных элементов графического языка. Классы TSum, TFunc, TSource, TLine, TDataSink являются соответственно шаблонами для блоков: сумматор, функция, сигнал, результат и линии связи.
После построения функциональной схемы исследуемой динамической системы при помощи графического языка моделирования необходимо визуальное представление модели транслировать во внутреннее представление среды имитационного моделирования. Эта задача решается в модуле транслятора. В качестве внутреннего представления используется древовидная структура. Корнем дерева является блок «результат», узлами дерева – сумматоры и блоки «функция», листьями – блоки «сигнал» (рис. 3).

Рис. 3. Внутреннее представление модели в виде дерева
Процесс моделирования происходит снизу вверх, то есть от листьев (блоков «Сигнал») к корню (блок «Результат»).
Данные от выхода одного блока к входу другого передаются в виде двумерного массива, содержащего дискретные значения времени и значения уровня сигнала в соответствующие моменты времени (рис. 4). Шаг дискретизации Δt является постоянным для всей имитационной модели. Он выбирается автоматически в зависимости от продолжительности сигнала либо задается пользователем.
Для построения внутреннего представления разработан построитель дерева. В его задачи входят определение взаиморасположения блоков на рабочем поле и создание поддеревьев для каждого линейного участка имитационной модели, составленной из типовых блоков графического языка моделирования. Каждое поддерево может иметь одного родителя и до трех потомков. Из совокупности таких поддеревьев формируется общее дерево, используемое средой имитационного моделирования в качестве внутреннего представления.
После составления пользователем имитационной модели, для повышения эффективности программы, важной является возможность повторного использования единожды созданной модели. С этой целью в программу имитационного моделирования встроена подсистема взаимодействия с внешней памятью, которая позволяет сохранить созданную модель на внешней памяти, а также при необходимости загрузить уже сохраненные модели.
Имитационная модель хранится в структурированном файле. В табл. 1 приведена структура этого файла.
В табл. 1: 1, 2, … N – номер строки; TYPE – тип элемента, может принимать значения: blFunc, blSum, blSource, blDataSink, blLine; ID – идентификационный номер элемента; X, Y – координаты элемента по оси абсцисс и оси ординат соответственно; NAME – символическое имя элемента.
Свойства блока зависят от его типа (табл. 2).
В табл. 2: OUT – идентификатор линии связи, выходящей из блока; IN – идентификатор линии связи, входящей в блок; NUMS – количество коэффициентов в числителе полинома передаточной функции; n1, n2, … – коэффициенты числителя полинома передаточной функции; DENS – количество коэффициентов в полиноме знаменателя передаточной функции; d1, d2, … – коэффициенты знаменателя полинома передаточной функции; IN1, IN2, IN3 – идентификаторы линий связи, входящих в 1, 2, 3 входы сумматора соответственно; SID – идентификатор блока, определяющий начало линии связи; SP – номер порта блока, определяющий начало линии связи; EID – идентификатор блока, определяющий конец линии связи; EP – номер порта блока, определяющий конец линии связи; SIGNALTYPE – тип сигнала в блоке «Сигнал», может принимать значения: stSingle, stSin, stPoints, stFile; SIGNALPARAMS – параметр сигнала, зависит от типа сигнала (табл. 3).
В табл. 3: BT – время начала сигнала; ET – время окончания сигнала; A – амплитуда синусоидального сигнала; W – круговая частота синусоидального сигнала; F – сдвиг фазы синусоидального сигнала; TS – количество значений времени; t1, t2 … – значения времени; VS – количество значений сигнала; v1, v2 … – значения сигнала в моменты времени t1, t2 … соответственно; FILENAME – название файла с сигналом; AP – номер технологического параметра из среды создания технологии испытания.
Таблица 1
Структура файла модели
|
1 | TYPE | ID | X | Y | NAME | Свойства блока |
|
2 | TYPE | ID | X | Y | NAME | Свойства блока |
|
. . . . . |
|
N | TYPE | ID | X | Y | NAME | Свойства блока |
Таблица 2
Параметры блока
|
Тип элемента |
Название блока |
Параметры |
|
blFunc |
Блок «Функция» |
OUT | IN |NUMS |n1 |n2 | … DENS | d1 | d2|… |
|
blSum |
Блок «Сумматор» |
OUT | IN1 | IN2 | IN3 | SG1 | SG1 | SG1 |
|
blSource |
Блок «Сигнал» |
OUT | SIGNALTYPE | SIGNALPARAMS |
|
blDataSink |
Блок «Результат» |
IN |
|
blLine |
Линия связи |
SID | SP | EID | EP |
Таблица 3
Параметры сигнала
|
Тип сигнала |
Пояснение |
Параметры сигнала |
|
stSingle |
Единичная функция |
BT | ET |
|
stSin |
Синусоидальная функция |
BT | ET | A | W | F |
|
stPoints |
Кусочно-линейная функция |
TS |t1 |t2 | … VS | v1 | v2|…| ET |
|
stFile |
Сигнал из внешнего файла |
FILENAME | AP | ET |
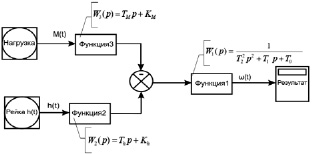
Рис. 4. Имитационная модель дизельного двигателя
Имитационная модель дизельных двигателей, составленная из типовых блоков графического языка моделирования, представлена на рис. 4.
Блоки «Функция 1», «Функция 2», «Функция 3» содержат коэффициенты полиномов передаточных функций, составленных согласно дифференциальному уравнению, описывающему режимы работы дизельных двигателей. Блок «Рейка h(t)» задает закон изменения положения рейки топливного насоса. Блок «Нагрузка» задает закон изменения нагрузки на коленчатый вал. Блок «Результат» является приемником сигнала.
Полученная схема имитационного моделирования позволила построить переходную характеристику работы дизельного двигателя при набросе нагрузки на вал двигателя. Так как при построении исходной экспериментальной характеристики время разгона двигателя и его прогрев не учитывались, то временная ось имеет нулевые координаты [4, 5].
Для определения соответствия полученной характеристики – исходной представим их в одной системе координат (рис. 5).

Рис. 5. Переходные характеристики дизельных двигателей (экспериментальная и смоделированная)
Такое совмещение характеристик дает представление о точности моделирования. По ним видно, что на участках, максимально удаленных друг от друга, погрешность моделирования составляет: по частоте вращения вала двигателя около 10 об./мин, а по времени – 0,1 с.
Для проверки адекватности модели применили сравнение экспериментальной переходной характеристики с характеристикой, полученной в результате имитации. Погрешность составила не более 0,5 % на интересующих нас участках установившейся работы двигателя.
Рецензенты:
Дмитриев С.В., д.т.н., профессор кафедры автомобилей, автомобильных двигателей и дизайна, Набережночелнинский институт (филиал), ФГАОУ ВО «Казанский (Приволжский) федеральный университет», г. Набережные Челны;
Колесников М.С., д.т.н., профессор кафедры машиностроения, Набережночелнинский институт (филиал), ФГАОУ ВО «Казанский (Приволжский) федеральный университет», г. Набережные Челны.
Библиографическая ссылка
Зубков Е.В. МОДУЛЬ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ РЕЖИМОВ РАБОТЫ ДИЗЕЛЕЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ ИСПЫТАНИЙ // Фундаментальные исследования. 2015. № 11-1. С. 49-53;URL: https://fundamental-research.ru/en/article/view?id=39282 (дата обращения: 04.07.2026).