


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
KINEMATIC AND DYNAMIC PARAMETERS OF THE MOVEMENT OF THE TROUGH OF THE INERTIAL CONVEYOR WITH THE CONSTANT PRESSURE OF FREIGHT UPON THE TROUGH BOTTOM

Одним из наиболее прогрессивных видов транспорта, обеспечивающим высокую производительность и технико-экономическую эффективность при больших грузопотоках, является конвейер. Анализ представленных в работе [5] конструкций существующих конвейеров показывает, что на горных предприятиях для транспортирования насыпных грузов с различным гранулометрическим составом (уголь, руда и т.д.) на расстояния от 20 до 100 м целесообразно использовать инерционные конвейеры с постоянным давлением груза на дно желоба. Инерционные конвейеры, как машины, относящиеся к динамическим колебательным системам, обладают высокой степенью стабильности в связи с тем, что амплитуда колебаний желоба в процессе работы конвейера постоянна. За последние десятилетия появились схемы инерционных конвейеров с изменяемыми рабочими параметрами, для которых высокая амплитуда при малой частоте колебаний обеспечивает высокую скорость транспортирования, не вызывая подбрасывания груза. В настоящее время задача оптимального проектирования механизмов конвейера сводится к выбору наиболее совершенной динамической схемы и параметров ее структурных элементов, при которых движения рабочих органов максимально удовлетворяют технологическим требованиям, а условия нагружения элементов машины – конструктивным ограничениям.
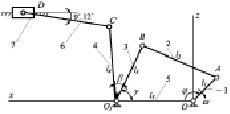
Исследования кинематических и динамических параметров инерционных конвейеров проводятся в основном для схем конвейеров с жесткими звеньями [8, 6]. Учитывая, что жесткость тяги, как последнего звена в кинематической цепи привода конвейера, оказывает наибольшее влияние на кинематику движения рабочего органа, исследования привода инерционного конвейера с тягой с переменной жесткости являются актуальными. В предыдущей работе [4] авторами настоящей статьи была выбрана структурная схема (рис. 1, а), позволяющая регулировать скорость перемещения груза за счет использования тяги с переменной жесткостью и достигать максимальной производительности транспортирования сыпучих материалов с различным гранулометрическим составом. В настоящей работе проводились исследования кинематических и динамических параметров движения желоба инерционного конвейера для транспортировки горных пород с учетом влияния жесткости тяг. Известно, что точность теоретических исследований зависит от полноты представления физических явлений, от принятых допущений и методов решений, т.е. от построения динамической модели и способов ее реализации. В работе [3] была представлена динамическая модель инерционного конвейера с учетом влияния жесткости тяг на колебания желоба, изображенная на рис. 1, б.
Движение желоба инерционного конвейера, согласно этой динамической схеме, при установившемся режиме движения и сухом трении описывалось дифференциальным уравнением
 (1)
(1)
где mk – приведенная масса желоба и груза; x1 – координата вращательной кинематической пары С, так как кинематическая цепь ОАВО1С жесткая (рис. 1); x2 – координата приведенной массы колеблющегося желоба с грузом; Cт – жесткость тяги; Fтр – сила сопротивления движению, знакопеременная на рабочем и холостом ходах желоба конвейера.
 а
а 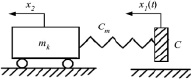 б
б
Рис. 1. Схемы привода инерционного конвейера: а – кинематическая схема привода (кривошип 1; шатун 2; коромысло 3–4; тяга 6; желоб конвейера 7); б – динамическая схема привода инерционного конвейера
Учитывая, что приводной двигатель передает мощность через жесткие звенья цепи ОАВО1С (рис. 1), методом векторных контуров был определен закон движения точки С:
 (2)
(2)
где b – угол между звеньями коромысла СО1В; φ – обобщенная координата кривошипа ОА; φ = ωt; ω – угловая скорость кривошипа; А, В, К, D – величины, определяемые геометрическими параметрами конструкции:




Для решения уравнения (1) был применен кусочно-линейный метод, так как системы, движение которых рассматривается с учетом сухого трения, относятся к нелинейным. Уравнение движения желоба с грузом представляли в виде суммы свободных и вынужденных колебаний с учетом действующей на желоб силы трения Fтр. Знакопеременную скорость желоба выражали единичной функцией  . В соответствии с этим свободные колебания желоба описываются уравнением:
. В соответствии с этим свободные колебания желоба описываются уравнением:
 (3)
(3)
Анализ свободных колебаний желоба проводился методом поэтапного рассмотрения, при этом последовательно выделялись интервалы движения желоба с постоянным знаком скорости [2]. На первом этапе желоб из крайнего правого положения (х2 = А1), движется влево без начальной скорости под действием силы упругости тяги, его скорость  , а уравнение движения желоба
, а уравнение движения желоба
 (4)
(4)
где k – частота свободных колебаний,  ; a1 – максимальное отклонение желоба влево под действием силы трения,
; a1 – максимальное отклонение желоба влево под действием силы трения,  .
.
Уравнение (4) справедливо при А1 > a1, так как при отклонении желоба на величину А1 ≤ a1 силы упругости тяги недостаточно для преодоления силы трения. Область положений желоба –a1 < х2 <+a1 является «зоной застоя». Общим решением уравнения (4) будет выражение

После определения постоянных С1 и С2 из начальных условий движения желоба x0 = A1;  оно примет вид
оно примет вид

 (5)
(5)
Закон движения желоба (5) справедлив до момента времени t1 = π/k, пока скорость желоба отрицательна, так как

В этот момент желоб остановится, а его смещение в левую крайнюю точку будет равно x2 = –(A1 – 2a1). После остановки желоб начнет двигаться вправо.
На втором этапе движения, когда, уравнение движения
 (6)
(6)
может рассматриваться как уравнение гармонических колебаний со смещением (x2 + a1). Это движение также происходит в течение времени π/k. Максимальное отклонение вправо на втором цикле колебания x2 = A1 – 4a1. Процесс движения продолжается до тех пор, пока желоб не попадет в зону застоя и не остановится. Фазовый портрет свободных колебаний желоба с грузом, как системы с сухим трением представлен на рис. 2.
В координатах (х2,  ) гармонический закон движения желоба изображается дугами окружности. На первом этапе, когда
) гармонический закон движения желоба изображается дугами окружности. На первом этапе, когда  , движение изображается полуокружностью радиусом (A1 – a1) с центром в точке (x2 = a1). Второй этап движения (при
, движение изображается полуокружностью радиусом (A1 – a1) с центром в точке (x2 = a1). Второй этап движения (при  ) представляет собой полуокружность с центром в точке (x2 = –a1). И так до тех пор, пока кривая на фазовой плоскости при
) представляет собой полуокружность с центром в точке (x2 = –a1). И так до тех пор, пока кривая на фазовой плоскости при  не попадает в зону застоя.
не попадает в зону застоя.
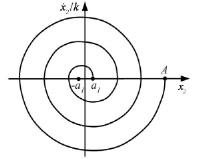
Рис. 2. Фазовый портрет свободных колебаний желоба
Вынужденные колебания желоба возникают при условии, что амплитуда возмущающей силы достаточно велика по сравнению с силой трения Fтр. При этом возмущающая сила выражается функцией Cтx1, изменяющейся по гармоническому закону. Тогда закон вынужденных колебаний желоба описывается уравнением
 (7)
(7)
а скорость и ускорение желоба конвейера определяются выражениями
 (8)
(8)
 (9)
(9)
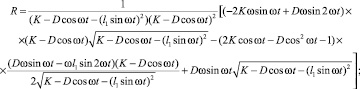
В результате определения констант интегрирования Н0, Н1, Н2 из начальных условий движения желоба с учетом дифференциального уравнения (1) был получен закон движения желоба конвейера с учетом жесткости тяг:
 (10)
(10)
где 
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
 (15)
(15)
При движении желоба с грузом свободные колебания, определяемые уравнением (5), накладываются на вынужденные колебания (10). Наличие сухого трения не изменяет частоту свободных колебаний, так как она во много раз больше частоты вынужденных колебаний, которые и оказывают основное влияние на закон движения желоба конвейера.
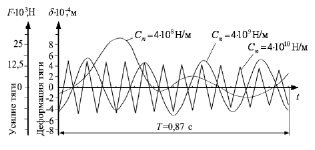
По полученным выражениям (7)–(15) проведены расчеты динамических параметров инерционного конвейера при различной жесткости тяги и построены диаграммы, представленные на рис. 3, а. В расчетах за деформацию тяги принимали величину δ = х2 – х1, а усилия, действующие на тягу F = Cтδ.. Из рис. 3, а видно, что тяга работает на сжатие и на растяжение, т.к. угол между осью тяги и направлением хода желоба невелик и составляет 9…12° (рис. 1, а). При больших углах тяга начинает работать в сложном напряженном состоянии (изгиб – растяжение – сжатие). Наибольшее усилие, действующее на тягу, и ее наибольшая деформация приходятся на начало прямого хода, что соответствует четверти периода Т полного оборота кривошипа ОА. Расчеты также показали, что на инерционном конвейере можно устанавливать тягу c жесткостью 4∙107 ≤ Ст ≤ 4∙109. Для большей жесткости закон движения не отражает действительного колебательного процесса.
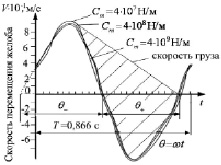
Результаты кинематических расчетов движения желоба и груза для инерционного конвейера с тягами различной жесткости представлены на рис. 3, б.
а
б
Рис. 3. Результаты динамических и кинематических расчетов: а – диаграммы деформаций тяги и усилий, действующих на тягу с различной жесткостью; б – диаграмма скорости желоба инерционного конвейера и груза
Процесс взаимодействия груза и желоба на одном цикле движения состоит в том, что на первом этапе груз перемещается вместе с желобом, удерживаясь на нем силой трения покоя. Когда желоб начинает торможение и сила трения не может удержать груз от проскальзывания по желобу, то скорость груза становится больше скорости желоба. Далее, под действием силы трения скольжения, скорости груза и желоба постепенно сближаются, груз перестает скользить по желобу, и параметры его движения опять совпадают с параметрами движения желоба. Результатом этого взаимодействия является положительное перемещение груза при возвращении желоба в исходное положение [7]. Данные, полученные в настоящей работе (рис. 3, б), подтверждают это описание. На диаграмме скорость груза показана для инерционного конвейера с тягой, имеющей жесткость Ст = 4∙107. Заштрихованная область соответствует абсолютному перемещению груза за один цикл работы инерционного конвейера [1]. Видно, что с уменьшением жесткости тяги увеличивается максимальная скорость желоба на рабочем ходу, а следовательно, и скорость перемещения груза по желобу конвейера.
По результатам проведенных исследований можно сделать следующие выводы:
1. Получено дифференциальное уравнение движения желоба инерционного конвейера с тягой переменной жесткости, позволяющее производить анализ движения груза в зависимости от конструкций приводных звеньев, их взаимного геометрического расположения и динамических характеристик.
2. Разработан алгоритм решения дифференциального уравнения и выполнены расчеты движения одномассной системы с переменной жесткостью. Проведен анализ свободных и вынужденных колебаний желоба инерционного конвейера с тягой переменной жесткости.
3. Результаты теоретических исследований инерционного конвейера с гибкой тягой могут быть использованы для выбора оптимальных параметров при создании инерционного конвейера принципиально нового устройства с продольным приложением возмущающего усилия, характеризующегося компактностью, пониженной материалоемкостью и энергоемкостью.
Библиографическая ссылка
Дьяконова В.Я., Калиновская Т.Г., Дьяконов М.Н. КИНЕМАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ПАРАМЕТРЫ ДВИЖЕНИЯ ЖЕЛОБА ИНЕРЦИОННОГО КОНВЕЙЕРА С ПОСТОЯННЫМ ДАВЛЕНИЕМ ГРУЗА НА ДНО ЖЕЛОБА // Фундаментальные исследования. 2015. № 2-26. С. 5781-5786;URL: https://fundamental-research.ru/en/article/view?id=38504 (дата обращения: 27.06.2026).