


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
EFFICIENCY OF COURTS ELECTRONIC CONTROL COMPLEX

На внутренних водных путях России эксплуатируются сотни разнообразных грузовых судов, причем в некоторых районах они оказываются, единственно возможным видом транспорта, способным перевозить в труднодоступные места значительное количество необходимых грузов. При этом движение даже одного судна может существенно влиять на окружающую среду [3, 9, 10]. Вместе с тем в недалеком прошлом общее количество судов внутреннего плавания было неизмеримо большим, перевозки по водным путям считались самым экономичным видом транспортировки самых разнообразных грузов.
В настоящее время положение значительно изменилось. Это связано, прежде всего, с резким возрастанием эксплуатационных затрат и в первую очередь с весьма значительным увеличением стоимости горюче-смазочных материалов и расходов на текущие ремонты, что, как следствие, предельно снизило конкурентоспособность всей структуры флота внутреннего плавания нашей страны. Необходимо признать, что единственно возможным в современных условиях путем исправления сложившейся ситуации является уменьшение эксплуатационных затрат и, прежде всего, существенное уменьшение расхода топлива судовыми механизмами и увеличение их моторесурса за счет внедрения прогрессивных технологий и современных технических средств, соответствующим образом повышающих экономичность работы флота.
Известно, что проектирование главной энергетической установки создаваемого водоизмещающего грузового судна в предположении повышения производительности его работы ведется при условии достижения максимально возможной номинальной скорости движения, ограниченной пределом появления развитого волнообразования (числом Fr ≈ 0,20). Вместе с тем стремление по возможности повысить грузовместимость судна обеспечивает увеличенную полноту обводов судового корпуса, что, в свою очередь, приводит к повышению нагруженности взаимоувязанного комплекса «главные двигатели – движители». Однако из практики эксплуатации судов внутреннего плавания известно, что движение судна по речному фарватеру с номинальными скоростями вращения главных двигателей (движителей) вовсе не является экономически наивыгоднейшим [4].
Действительно, при сокращении общего ходового времени в рейсе, повышении производительности работы судна, улучшении использования фонда заработной платы заметно ухудшаются другие эксплуатационные составляющие, такие как расход топлива главным двигателем за рейс, износ механизмов и в первую очередь элементов силовой установки, снижается безопасность плавания. Наоборот, если судно движется со слишком малыми скоростями, то ухудшение экономических и эксплуатационных показателей будет наблюдаться за счет увеличения доли заработной платы, ходового времени, снижения объема перевозок. Картина еще более ухудшается, если при работе судна появляются незапланированные простои при ожидании разгрузки, шлюзования и т.п. [7].
С давнего времени предпринимались попытки определения такой оптимальной скорости движения судна в рейсе, при которой эксплуатационные характеристики работы главных двигателей оказались бы экономически наивыгоднейшими. При этом к понятию «оптимальная скорость» добавлялось ограничение в виде некоторой «безопасной» скорости, при которой прохождение мелководных участков происходило бы без сильного увеличения волнообразования, заметной просадки кормовой оконечности судна, недопустимой перегрузки главных двигателей, без опасного увеличения вибрации. Эта сложная задача нашла свое разрешение в работах многих специалистов, однако такие решения оказались лишь приблизительными, не учитывающими полную картину эксплуатации судна.
Это обусловлено тем, что в каждый момент рейса судно движется в постоянно изменяющихся путевых и гидрометеорологических условиях. К ним в первую очередь можно отнести переменную глубину фарватера, извилистость судового хода, ветро-волновые условия, ожидание шлюзования и т.д. Эти величины не поддаются точному прогнозированию, могут приниматься лишь как средние за рейс, однако очень сильно влияют на режимы работы главных двигателей, рулевого комплекса судна, на технико-экономические показатели его работы.
Предпринимались и предпринимаются попытки разделить вероятные основные рейсы судов на отдельные участки, для которых определяют оптимальные скорости и режимы работы силовой установки. Но и эти попытки далеки от совершенства, особенно если принимать во внимание изменение уровня воды в реке на протяжении навигации. Кроме того, такой подход возлагает дополнительную нагрузку на судоводителей и они, естественно, не принимают его в практику судовождения. Поэтому оптимистические результаты испытаний судов при таком подходе искусственны, наблюдаются только при проведении самих испытаний. Кроме того, оптимальные скорости зависят и от технического состояния судна, количества перевозимого груза (посадки судна), характера груза (провозной платы), других условий рейса, например возможных премий за срочную доставку или, наоборот, штрафов за опоздание. Поэтому потребовалась бы огромная работа по составлению объемистых томов по величинам оптимальных скоростей для разнообразных условий, пользоваться которыми было бы крайне затруднительно. А если принять во внимание и разное техническое состояние силовых установок конкретных теплоходов, то такой подход к решению задачи оказывается просто неосуществимым.
Естественно, что управление режимами главных двигателей в целях наивыгоднейшей работы судна необходимо поручить автоматизированному комплексу, который в любой момент времени мог бы достоверно обеспечивать наиболее рациональные режимы движения судна с учетом не только внешних условий, но и его конкретных технических параметров [8]. Таким образом, одной из узловых задач автоматизации и компьютеризации судоходства является задача обеспечения оптимальных, экономически и технически выгодных режимов работы движительно-рулевых комплексов судов, особенно главных двигателей в постоянно меняющихся сложных путевых, гидрометеорологических и экономических условиях их эксплуатации [11].
Эта задача не может быть возложена на судоводителей, т.к. постоянная оценка многочисленных изменяющихся факторов, выработка в каждом конкретном случае единственно правильного решения находится за пределами человеческих возможностей. Попытки хотя бы и не в полной мере обязать судоводителей отрабатывать оптимальные режимы приведут к усложнению и без того напряженной их работы, увеличат число ошибок, снизят показатели безопасности плавания. Вместе с тем, эта задача вполне разрешима на основе современных методов судовождения, базирующихся на достоверной теории работы судового комплекса «корпус судна – средства управления – судовые главные двигатели» [5].
В данной статье рассматриваются результаты многолетней работы по созданию и внедрению на судах АО «Волга-флот» специализированного судового электронного управляющего комплекса, автоматически обеспечивающего в любой момент движения судна такие оптимальные режимы работы главных двигателей, при которых достигаются минимальные эксплуатационные расходы и наибольшая прибыль. При этом учитываются не только постоянные данные рейса, такие как провозная плата и тип груза, загрузка судна, техническое состояние его пропульсивного комплекса и корпуса судна, цена на горюче-смазочные материалы, затраты на зарплату экипажа, премии за досрочную доставку груза и штрафы за опоздание и т.п., но и постоянно меняющиеся путевые и гидрометеорологические условия (глубина и извилистость судового хода, ветро-волновые условия, возможные задержки и т.п.) [1].
Положительные результаты работы подтверждаются материалами нескольких натурных испытаний судов типа «Волго-Дон», а также наблюдениями и сравнительным анализом, проведенными в течение ряда навигаций на малой серии судов, оборудованных судовыми электронными управляющими комплексами (СЭУК). Предварительные расчеты эффективности СЭУК показывают, что может быть достигнута очень высокая экономия топлива, потребного на работу главных двигателей (при сложном фарватере до 20–30 %), а также значительное повышение прибылей (10–15 %). Такие расчеты подтверждаются результатами специально поставленных натурных испытаний [2]. Однако следует заметить, что при подведении итогов за навигацию эти показатели, хотя и вполне ощутимы, но ниже ожидаемых, что объясняется не недостатками комплекса, а особенностями начального периода их внедрения и существующей экономической ситуацией, при которой лихорадит работу флота в целом.
Основой эффективной работы управляющих устройств являются оперативные расчеты, проводимые на ПЭВМ экипажем судна в начале рейса и при возможных изменениях. Программы расчетов построены таким образом, чтобы предельно упростить пользование ими малоподготовленными специалистами. В качестве дополнительных удобств созданы и опробованы сервисные программы по ведению погрузки-разгрузки судна, бухгалтерских расчетов, колпита и т.д. Пользование СЭУК вполне доступно судоводителю средней квалификации. Экипажи судов, на которых эксплуатировались СЭУК, положительно о них отзываются [6].
Судовой электронный управляющий комплекс (СЭУК) представляет собой систему взаимосвязанных вычислительного комплекса (ПЭВМ) и электронного регулятора оптимальных режимов работы главных двигателей. Конструкция СЭУК обеспечивает расчет на ЭВМ и автоматическое поддержание при изменяющихся внешних условиях таких режимов работы главных двигателей, при которых затраты за каждый конкретный рейс являются минимальными, а прибыль за рейс – максимальной. Кроме того, СЭУК обеспечивает минимум расхода топлива в обоснованных случаях, например при наличии резерва ходового времени. Одновременно наличие вычислительного комплекса позволяет упростить и облегчить работу экипажа судна за счет применения пакета сервисных программ.
Электронный регулятор оптимальных режимов работы главных двигателей или электронный регулятор движения (ЭРД) представляет собой электронно-механическое устройство, работающее по заложенной в него программе, параметры которой определяются и настраиваются по результатам расчета рейса на ЭВМ установкой в соответствующее положение настроечных элементов.
Первоначально ЭРД был создан для осуществления оптимального регулирования в автономном режиме без ПЭВМ, т.е. для обеспечения безопасных режимов работы главных двигателей судна при переменном мелководье (1990–1992 г.). К навигации 1993 года ЭРД был подготовлен для работы совместно с ПЭВМ и в настоящее время предназначен для обеспечения наивыгоднейших режимов работы главных двигателей в течение всего рейса [7].
Примечательно, что конструкция ЭРД не требует каких-либо изменений в судовой системе управления главными двигателями. В любой момент времени, по необходимости, ЭРД может быть просто отключен из работы и дальнейшее управление судном будет производиться вручную обычными приемами. Также просто и включение ЭРД в работу при переходе на автоматическое управление. Схема подключения ЭРД к судовой системе ДАУ представлена на рисунке.
ЭРД имеет следующие составные части:
1. Блок питания, преобразующий переменный ток напряжением 220 В в судовой электросети в постоянный ток 12 В для питания блока регулирования, а также в переменный ток напряжением 127 В для питания электродвигателей исполнительных механизмов.
2. Электронный блок регулирования, выдающий сигнал на включение или отключение электродвигателей исполнительных механизмов в зависимости от поступающих к блоку сигналов от датчиков, определяющих степень нагруженности двигателей.
3. Исполнительные механизмы (по одному на каждый двигатель), в которых предусмотрены устройства, обеспечивающие надежность и безопасность работы исполнительного механизма и ЭРД в целом (микровыключатели, пружинные компенсаторы, механизмы экстренного отключения и т.п.).
4. Датчики скорости вращения главных двигателей.
5. Датчики изменения циклового расхода топлива (датчиков обратной связи).
6. Автоматические включатели (по одному на каждый двигатель), автоматически вводящие блок регулирования в действие при установке рукояток управления главными двигателями в режим полного хода (в автоматическом режиме).
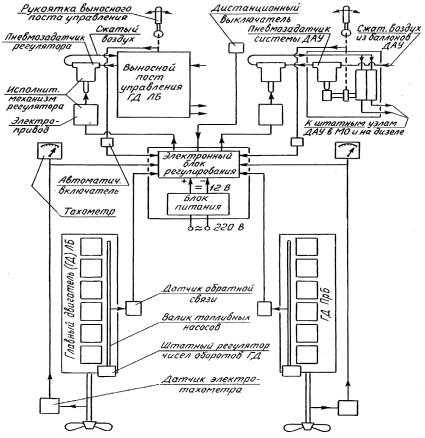
Схема подключения ЭРД к судовой системе ДАУ
7. Переключатель работы ЭРД «Авт.» – «Ручн.», устанавливаемый на рабочем месте судоводителя и служащий для оперативного отключения ЭРД.
Блок регулирования ЭРД, получая сигналы от датчиков, определяющих степень нагруженности двигателей, реагирует на рассогласование этих сигналов при изменении нагрузки движителей в соответствии с положением настроечных задатчиков, т.е. с собственной характеристикой, на которую он настроен по данным расчета на ПЭВМ.
Обычно настроечные режимы рассчитываются для движения судна на свободной глубокой воде. При этом при движении на глубокой воде сигналы датчиков не вызывают рассогласования в блоке регулирования и срабатывания исполнительных механизмов не происходит. Если нагрузка на движителе вследствие каких-либо причин (изменение глубины судового хода в меньшую сторону, вхождение судна в поворот, движение с углом дрейфа и т.п.) изменяется, то появляется рассогласование в блоке регулирования, и исполнительный механизм начинает воздействовать на систему ДАУ, соответственно изменяя подачу топлива на главный двигатель. Происходит изменение скорости вращения главного двигателя до тех пор, пока сигналы с датчиков не придут на нужные уровни. При этом установится наивыгоднейший режим работы главного двигателя. Таким образом, ЭРД реагирует на любое изменение нагрузки на движители, независимо от причин, их вызвавших. Когда действие внешних причин устранится (судно опять перейдет на глубокую воду, установится прямой курс и т.п.), ЭРД снова вернет главные двигатели в настроечные режимы [5].
Блок регулирования, конструктивно объединенный с блоком питания, имеет небольшие массово-габаритные характеристики, легко устанавливается в рубке теплохода. На лицевую панель блока вынесены устройства информации о его работе и настроечные элементы. Он легко доступен для осмотра и обслуживания.
На основании многолетних теоретических исследований, модельных и натурных испытаний к навигации 1993 года была подготовлена необходимая база для разработки алгоритмов следующих программ [2].
1. Программа «REGUL». Это программа оптимизации режимов работы главных двигателей по минимуму приведенных затрат. Позволяет рассчитывать параметры настройки электронного регулятора по следующим исходным данным: цена топлива, цена масла, месячный фонд заработной платы, вес груза и балласта.
2. Программа «REZERV». Это программа оптимизации режимов работы главных двигателей при наличии резерва ходового времени. Позволяет рассчитывать параметры движения судна (оптимальные средние числа оборотов и суммарный расход топлива при движении на одном и на двух двигателях) по следующим исходным данным: расстояние, располагаемое время, средняя осадка судна, средняя глубина судового хода, средняя скорость течения, характеристики судна по результатам теплотехнических испытаний.
3. Программа «TOPLIVO». Позволяет рассчитывать расход топлива в час и на 1 км пути, а также скорость судна относительно берега при движении на одном и на двух главных двигателях по следующим исходным данным: числа оборотов ГД, средняя осадка судна, глубина судового хода, средняя скорость течения, характеристики судна по результатам испытаний [6].
4. Программа «SKOROST». Позволяет рассчитывать расход топлива в час и на 1 км пути, а также число оборотов ГД при движении на одном и на двух ГД по следующим исходным данным: скорость судна относительно берега, средняя осадка судна, глубина судового хода, средняя скорость течения, характеристики судна по результатам испытаний.
5. Программа «POGRУZ». Позволяет с помощью ЭВМ контролировать процесс погрузки и производить ее в соответствии с «инструкцией погрузки, выгрузки и балластировки теплоходов проекта 507Б № 507/5805-19» 2, заложенной в программу: каждый новый этап погрузки начинается с контроля осадки судна в шести точках, который производится или визуально, или автоматически, с помощью датчиков. Вышеупомянутая инструкция устанавливает процесс погрузки, выгрузки и балластировки при перевозке основных спецификационных грузов. Инструкция также определяет порядок балластировки, выполняемой для обеспечения порожних пробегов судна или для осмотра ступицы гребного винта на плаву. Причем прочность корпуса обеспечивается для всех случаев загрузки, предусмотренных этой программой. Использование этой программы позволяет составить электронный журнал погрузо-разгрузочных операций за время всей навигации.
6. Программа «ZARPLATA». Позволяет рассчитать зарплату для всех членов команды и вывести результаты расчетов на печать в табличной форме.
7. Программа «KOLPIT». Позволяет рассчитать и распределить затраты на коллективное питание для всех членов команды и пассажиров и вывести результаты расчетов на печать в табличной форме.
В результате проверки программы «POGRУZ» в навигацию 1993 года на судах «Волго-Дон 137» было сделано одно замечание: поскольку балластная цистерна используется на действующих судах типа «Волго-Дон» в качестве хранилища питьевой воды, то без ее откачки невозможно было загрузить судно на ровный киль.
К навигации 1994 года была разработана новая программа «GRУZ», в которой это замечание было учтено. В соответствии с этой программой погрузка судна на ровный киль без откачки воды из шестой цистерны стала возможной [1].
Кроме этой программы, к навигации 1994 года была разработана принципиально новая программа оптимизации режимов работы главных двигателей по возможному максимуму прибыли за рейс (программа «PRIRES»). Эта программа позволяет рассчитывать параметры настройки электронного регулятора, а также величину прибыли за рейс при движении на оптимальных числах оборотов. При расчете вводятся следующие исходные данные: цена топлива, месячный фонд заработной платы, плата за рейс, расстояние, средняя глубина судового хода, средняя скорость течения, штраф за опоздание, премия за досрочную доставку груза.
Время расчета по каждой из программ, за исключением программ «POGRУZ» и «GRУZ», составляет несколько секунд, т.е. основное время (также очень незначительное) тратится пользователем на ввод в ЭВМ исходных данных. Программы «POGRУZ» и «GRУZ» предусматривают работу в диалоге с ЭВМ в течение всей погрузки.
Программное обеспечение СЭУК в навигации 1995 года и начале навигации 1996 года претерпело некоторые изменения по сравнению с 1994 годом. В навигации 1995 года были вновь разработаны программы «Рейс» и «Бланк», а в программу «Зарплата» были внесены изменения. Программа «Рейс» объединила и заменила ранее использовавшиеся программы «Регул» и «Прирес» («Прибыль за рейс»), повысила точность и достоверность расчета с помощью использования при расчете дополнительных исходных данных. Программа «Бланк» появилась в ответ на потребность экипажа при пересечении границы России с Украиной заполнять ряд документов, бланки которых у экипажа были в ограниченном количестве (а некоторых совсем не было). В программу «Зарплата» были внесены изменения, связанные со спецификой оформления на работу и расчета месячной заработной платы практикантов.
В навигации 1996 года программное обеспечение также изменилось (модернизировалось) по сравнению с предыдущей навигацией [2].
Программа «Рейс» приобрела новую форму, обеспечившую удобство пользования и наглядность. Программа «Колпит» несколько видоизменилась и разделилась на два варианта с возможностью распечатки на целую страницу и с уплотненной распечаткой.
Как показали проведенные расчеты, наблюдения за эксплуатацией грузовых теплоходов, оборудованных СЭУК, а также натурные испытания 1994 года на т/х «Волго-Дон 137» и 1995 года на т/х «Волго-Дон 5020», внедрение СЭУК обеспечивает движение судна на оптимальных режимах с минимальными эксплуатационными расходами за рейс. Так, по сравнению с принятым АО «Волга-флот» эксплуатационным режимом, режим, рассчитанный и поддерживаемый СЭУК, обеспечивает снижение расхода топлива за рейс на 20,7 % при увеличении ходового времени на 13 %, что дает снижение эксплуатационных расходов на 9,8 %. Вычислительно-управляющий комплекс СЭУК имеет и другие дополнительные возможности, такие как расчеты оптимальной погрузки и разгрузки судна, обеспечение заданного времени подхода к шлюзам и портам, расходования топлива, ведение колпита, бухгалтерский учет и многое другое, что существенно облегчает труд судоводителей и вносит дополнительный вклад в повышение рентабельности работы флота. При дальнейшем внедрении СЭУК на судах внутреннего плавания могут быть достигнуты существенно лучшие показатели по экономии топлива, снижению эксплуатационных расходов и повышению прибыли, а также налажен автоматизированный учет и контроль расхода топлива и других показателей работы судна и флота в целом. Возможно придание СЭУК функций «авторулевого» [2].
Одновременно СЭУК может быть использован и для решения сложных эксплуатационных задач, таких как технико-экономическое планирование рейса грузовых и пассажирских судов, толкаемых и секционных составов, нормирование расхода топлива и горюче-смазочных материалов, создание обоснованных и экономичных графиков движения судов, для решения конструкторских задач.
Как показала проводимая в течение ряда лет работа по разработке, созданию, внедрению и эксплуатации СЭУК на судах АО «Волга-флот», натурные испытания судов, оборудованных СЭУК в реальных условиях эксплуатации, сравнительные результаты показателей экономии топлива за навигацию, СЭУК дает существенную прибыль и легко окупается в течение нескольких месяцев эксплуатации. Так, проведенные на грузовом теплоходе «Волго-Дон 137» на р. Волге в сентябре 1994 года испытания показали, что за счет работы комплекса расход топлива может быть уменьшен на 30 %, а прибыль возрасти не менее, чем на 13 %, что в ценах 1994 года составляет 10,3 млн руб. на одно судно за навигацию (см. акты испытаний т/х «Волго-Дон 137» и «Волго-Дон 5020»). Вместе с тем стоимость СЭУК в этом же году составила 3 млн руб. Таким образом, при минимальных начальных затратах на разработку и внедрение СЭУК на большой серии судов за счет его работы может быть достигнуто большое увеличение прибылей от эксплуатации флота, особенно за счет экономии топлива [2].
Кроме экономических выгод, автоматизированный судовой электронный управляющий комплекс, работающий без непосредственного участия капитана и механика судна, улучшает условия работы экипажа. Он прост по конструкции, удобен и надежен в эксплуатации. Нарушения его работы, выхода из строя в процессе опытной эксплуатации головных, а также малой серии судов (5 теплоходов) не наблюдалось.
При этом следует отметить, что аналогов разработанному и внедренному в эксплуатацию СЭУК в мировой практике автоматизации флота не имеется.
Рецензенты:
Кузьмин Н.А., д.т.н., профессор, зав. кафедрой «Автомобильный транспорт», Нижегородский государственный технический университет им. Р.Е. Алексеева, г. Нижний Новгород;
Панов А.Ю., д.т.н., профессор, директор ИПТМ, Нижегородский государственный технический университет им. Р.Е. Алексеева, г. Нижний Новгород.
Библиографическая ссылка
Пачурин Г.В., Васильев С.А., Ребрушкин М.Н. ЭФФЕКТИВНЫЙ СУДОВОЙ ЭЛЕКТРОННЫЙ УПРАВЛЯЮЩИЙ КОМПЛЕКС // Фундаментальные исследования. 2015. № 2-19. С. 4171-4177;URL: https://fundamental-research.ru/en/article/view?id=37924 (дата обращения: 30.06.2026).