


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
STUDY OF THE DYNAMICS OF MECHATRONIC DEVICES FOR REHABILITATION OF PATIENTS WITH MOTOR DISORDERS OF THE LOWER EXTREMITIES

Увеличение продолжительности жизни, урбанизация, изменение характера питания, загрязнение воды и атмосферы – эти и многие другие факторы привели к глубоким изменениям в состоянии популяции. На рубеже второго и третьего тысячелетий инсульт стал одной из основных проблем здравоохранения. Каждый год в мире эта патология поражает около 16 млн человек, из них 5,7 млн умирают, и столько же становятся инвалидами. В Российской Федерации (40–50 %) 1-е место в структуре патологии занимает инсульт, являющийся причиной инвалидности. К сожалению, только 20 % лиц, перенесших инсульт, возвращаются к труду. При этом потери государства от одного больного, получившего инвалидность, составляют порядка 1247000 рублей в год.
Это обусловливает важность проблемы профилактики данного заболевания и реабилитации больных, перенесших инсульт. Наиболее частым последствием, приводящим к инвалидности, является нарушение двигательных функций. По данным регистра мозгового инсульта НИИ неврологии РАМН, к концу острого периода двигательные нарушения наблюдаются у 81,2 % из 100 выживших больных [2].
В последнее время в результате развития вычислительной техники и мехатроники значительно увеличилось число биомехатронных тренажёров для лечебных и реабилитационных целей [1]. Медицинские потребности в таком оборудовании велики. Они связаны с увеличением среднего возраста населения в России и с ростом числа случаев инсульта. Другим источником потребностей в реабилитационных устройствах являются случаи спортивных, автомобильных или военных травм спинного мозга.
Для использования ранних программ реабилитации людей с нарушениями двигательных функций нижних конечностей целесообразно применять современные механотерапевтические устройства, разрабатываемые на основе последних инновационных достижений в области медицины, биоинженерии, мехатроники, компьютерной техники, механики, математики и других фундаментальных дисциплин [5].
Цель: проведение математического моделирования динамического поведения биоинженерного мехатронного устройства, обеспечивающего повышение эффективности реабилитационных программ у больных с нарушениями функций опорно-двигательного аппарата.
Материалы и методы исследования
Поставленные задачи решаются с применением методов теоретической и прикладной механики, теории робототехнических систем, математического моделирования и систем управления.
Результаты исследования и их обсуждение
Исследуемое нами устройство для механотерапии нижних конечностей человека с интегрированным в него мехатронным модулем, представляет собой систему, состоящую из шарнирно закреплённых подвижных звеньев, комбинированного привода линейного перемещения с датчиком угла поворота, датчика нагрузки на опорную пяту и концевых предохранительных выключателей. Управление приводами осуществляется посредством микропроцессорного блока [4].
На рис. 1 представлен коленный мехатронный модуль, включающий в себя жесткое основание 1, которое при помощи гибких эластичных ремней (2) крепится к бедру человека. К нижней части основания (1) присоединена с образованием вращательной кинематической пары поворотная пластина (3), которая с помощью гибких эластичных ремней (2) крепится к голени человека. В верхней части основания (1) присоединен привод поступательного движения (4), выходной вал которого соединен с поворотной пластиной (3) при помощи сферического шарнира. В нижней части бедра, в районе медиальной широкой мышцы, крепится датчик биологического сигнала, соединенный с системой компьютерного управления.
Работа устройства осуществляется следующим образом. Для принудительного совершения движения в коленном суставе из системы компьютерного управления поступает сигнал в виде питающего напряжения, подаваемого на привод поступательного движения (4). Величина напряжения пропорциональна величине требуемого выходного усилия коленного модуля. При этом выходной вал привода (4) совершает поступательное перемещение в необходимом направлении, приводя в движение поворотную пластину (3), которая также совершает угловое перемещение вместе с голенью. Затем, в соответствии с программой управления, выходной вал привода (4) движется в обратном направлении, и поворотная пластина вместе с голенью возвращается в исходное положение. Затем цикл повторяется.
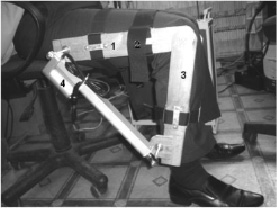
Рис. 1. Коленный мехатронный модуль в составе реабилитационного устройства для механотерапии

Рис. 2. График изменения межзвенного угла
Данный модуль позволяет реализовать только двухмерное движение в сагиттальной плоскости. В устройстве используется комбинированный привод линейного перемещения LAS-1-1-150-12GE с электродвигателем постоянного тока и преобразователем движения – шариковинтовой передачей. Путём математического моделирования были выбраны параметры макета (размеры, массы, моменты инерции звеньев) [3]. Мехатронный модуль оснащен импульсным датчиком, измеряющим угол α. Угловые скорости вычисляются на основе информации об угловых положениях. Датчик крепится к оси мотора и «выдаёт» 2000 импульсов на оборот. Вычисление управляющего сигнала происходит через каждые 5 мс (200 Гц). В программном обеспечении используется язык C++.
Модуль позволяет осуществлять принудительное сгибание-разгибание нижней конечности в коленном суставе, обеспечивая постоянный контроль естественных движений. В ходе исследования была проведена оценка конструктивных решений мехатронного модуля с целью оптимизации по весовым, энергетическим, эргономическим и другим эксплуатационно-техническим показателям, обеспечивающим выполнение заданных требований. Были выявлены значения показателей, полученные в ходе исследования, и осуществлен прогноз их изменения в процессе эксплуатации.
На рис. 2 представлен график изменения межзвенного угла α, полученный при математическом моделировании 1 и в экспериментах 2.
Во время экспериментов, представленных на рис. 2, максимальная скорость перемещения нижней точки поворотной пластины составляет примерно 25 мм/c, что несколько меньше (12 %), чем при математическом моделировании этого процесса. Уменьшив продолжительность фазы двойной опоры, можно увеличить скорость перемещения исполнительного звена мехатронного модуля.
В процессе передвижения учитывалась деформируемость звеньев (костей), из которых состоит опорно-двигательный аппарат. Максимальные ускорения звеньев снижаются почти на порядок, так как при ходьбе происходит рекуперация энергии. Кинетическая энергия движения при постановке ноги не полностью диссипатирует, а частично переходит в потенциальную энергию упруго деформирующихся звеньев, которая, в свою очередь, при смене опорной ноги частично преобразуется в кинетическую энергию при отталкивании.
Особенности конструкции устройства позволяют нагружать нижнюю конечность посредством упражнений, стимулирующих мышечную активность, улучшая функции и предотвращая неблагоприятные эффекты от вынужденной длительной гиподинамии. Программное обеспечение контролирует пациента и оптимизирует прогресс физиотерапии. Предусмотрен широкий набор физических упражнений с различными уровнями сложности для оптимизации индивидуальной нагрузки. Разновариантные комплексы упражнений позволяют существенно расширить доступный объем движений. Разработанное программное обеспечение регистрирует движения нижней конечности, позволяя врачу в реальном времени контролировать состояние пациента и процесс механотерапии.
Разработанный мехатронный коленный модуль может применяться отдельно для восстановления функции тугоподвижных суставов. При этом используется методика статического прогрессивного вытяжения. В основе методики лежит механическое растяжение тугоподвижного сустава и его последующая релаксация, чередуемые каждые 5–8 минут в течение 30–40 минут. В отличие от динамического вытяжения с помощью других методик данный модуль позволяет получать эффективные результаты. Методика проста в использовании: пациент имеет возможность самостоятельно регулировать нагрузку, ориентируясь на свои ощущения. Разработанный биоинженерный мехатронный модуль может использоваться в суставах с ограниченным уровнем подвижности в тех случаях, когда невозможно пассивное движение – в том числе при болезненных движениях в суставах.
Приводы мехатронных модулей разработанного реабилитационного устройства обладают стабильной угловой скоростью, которая предотвращает адгезии и контрактуры. Особенности конструкции устройства минимизируют переднее большеберцовое смещение и обеспечивают минимальную нагрузку на коленный сустав, осуществляя его синхронную разработку, а также поддерживает регулировку движений голеностопного сустава для полного пассивного восстановления подвижности нижней конечности.
Меры безопасности включают контроль всех операций блоком управления, который изменяет направление движения при выключении и включении, а также изменяет нагрузку при сопротивлении пациента движениям аппарата или когда движение устройства по каким-либо причинам затруднено. Данное устройство реализует принудительное движение.
Выводы
Таким образом, в ходе исследования был теоретически обоснован принцип движения реабилитационных устройств, основанный на биомеханических возможностях человека и соответствующий фазам движения конечности. В результате проведенного анализа динамической модели мехатронной системы выявлена нелинейная зависимость сил, действующих на нижнюю конечность человека, и установлены законы управляющего напряжения, позволяющие уменьшить ускорение и снижать уровень негативного влияния на состояние пациента. Отклонение экспериментальных данных от значений, полученных в ходе математического моделирования, связано с погрешностью измерений и составляет в среднем 8–10 %.
Полученные результаты экспериментов подтверждают правильность предложенной математической модели, воспроизводящей динамику системы «реабилитационное устройство – нога человека», что может быть использовано при отработке различных программ реабилитации в кинезиологии и физиотерапи.
Работа выполнена в рамках Гранта РНФ № 14-39-00008.
Рецензенты:
Савин Л.А., д.т.н., профессор, заведующий кафедрой «Мехатроника и международный инжиниринг», ФГБОУ ВПО «Государственный университет – ГНПК», г. Орел;
Шевякин В.Н., д.т.н., профессор, профессор кафедры механики, мехатроники и робототехники, ФГБОУ «Юго-Западный государственный университет», г. Курск.
Библиографическая ссылка
Яцун С.М., Лунева Н.В., Соколова И.А., Яцун А.С. ИССЛЕДОВАНИЕ ДИНАМИКИ МЕХАТРОННОГО УСТРОЙСТВА ДЛЯ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С НАРУШЕНИЯМИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ НИЖНИХ КОНЕЧНОСТЕЙ // Фундаментальные исследования. 2015. № 1-6. С. 1264-1267;URL: https://fundamental-research.ru/en/article/view?id=37756 (дата обращения: 21.07.2026).