


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
TECHNOLOGICAL MACHINES BASED MECHANISMS WITH A CLOSED SYSTEM OF THE ROLLING ELEMENTS

Производство изделий машиностроения предполагает реализацию процессов, требующих придания исполнительным органам технологических машин сложного движения. Примерами подобных технологических операций могут являться: перемешивание различных компонентов (сухих, жидких, вязких), шлифование или полирование плоских поверхностей. Механизмы со сложным движением одного из звеньев получили широкое распространение и довольно успешно применяются в представленных выше технологических операциях. Анализ существующих конструкций механизмов данного вида показывает, что все эти устройства включают в себя, как правило, комбинацию механизмов, призванных обеспечить заданный закон движения рабочего органа. Вследствие этого машины, разработанные на их основе, становятся нетехнологичными, дорогостоящими и сложными в изготовлении, а также обладающими относительно большими габаритными размерами и массой. Кроме этого, при работе данные механизмы создают высокий шум, что приводит к быстрой утомляемости рабочего и, соответственно, к низкой производительности труда. Повышение скорости выполнения и расширение диапазона технологических операций требуют использования новых конструкторских решений на стадиях проектирования или модернизации технологического оборудования.
Процесс модернизации и развития промышленного потенциала России в условиях импортозамещения показывает актуальность поиска новых структурных схем механизмов, позволяющих реализовывать сложные движения звеньев при минимально возможном числе подвижных соединений. Это дает возможность формировать приводы технологического оборудования с требуемыми свойствами и показателями качества. Перечисленным свойствам соответствуют механизмы с замкнутой системой тел качения (ЗСТК).
Механизмы с ЗСТК обладают структурой, образованной совокупностью двух колец с дорожками качения, сепаратором (водило) и замкнутой системой тел качения с диаметрами равной или разной величины (рис. 1, 2).
Тела качения могут обладать гладкими рабочими поверхностями (фрикционные) [2, 4–13] или поверхностями с выступами (зубчатые) [1, 3]. Наличие сепаратора в структуре механизмов с ЗСТК позволяет исключить контакт тел качения друг с другом, обеспечив между ними наличие зазора. Передача движения между звеньями осуществляется посредством непосредственного контакта тел качения с дорожками качения обоих колец. Механизмы рассматриваемого вида являются представителями эпициклических механизмов, следовательно, обладают прямым, обратным и внутренним передаточными отношениями. В зависимости от сочетания подвижных и неподвижных звеньев эпициклические механизмы данного вида являются либо планетарными, либо дифференциальными, которые могут работать в режиме редуктора (при i > 1) или мультипликатора (при i < 1).
Коллектив авторов проводит исследования геометрических и кинематических параметров технологического оборудования, обладающего приводом, который разработан на базе механизмов с ЗСТК с диаметрами разной (эксцентриковые) [1–3, 7, 9–13] или равной (соосные) [4–6, 8] величины. В ходе исследований установлено: если структура механизма содержит замкнутую систему тел качения, то задача определения номинальных значений геометрических параметров механизмов с ЗСТК должна решаться при начальных условиях, что исходные параметры являются постоянными величинами больше нуля при наличии или отсутствии зазора между телами качения [2, 6, 8, 10]. Дальнейшие исследования показали, что для решения задачи по определению номинальных величин геометрических параметров при данных условиях необходим ввод поправки в расчет, считая один из исходных параметров величиной переменной. Вариация значениями радиуса тел качения и зазора не позволяет достичь требуемого результата. В этом случае получаем, что решение имеет два возможных направления ввода поправки по радиусу дорожки качения одного из колец наружного или внутреннего.
Настоящее исследование проводится с целью расширения области применения механизмов с замкнутой системой тел качения с диаметрами как равной, так и неравной величины для любого вида симметричной структурной схемы при вариации ведущими звеньями и направлениями ввода поправок в расчет номинальных величин геометрических параметров. Полученные результаты позволяют разрабатывать технологические машины на базе механизмов с ЗСТК, обладающих требуемыми свойствами и показателями качества.
Методы исследования, применяемые в настоящей работе, основаны на принципах структурного, кинематического и силового анализа механизмов при использовании положений геометрии и тригонометрии.
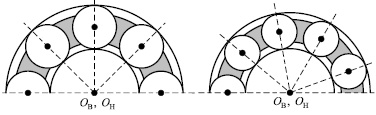
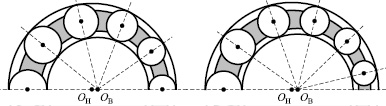
Для механизмов с ЗСТК с диаметрами равной величины характерно наличие двух видов симметричных структурных схем (рис. 1), а при ЗСТК с диаметрами разной величины характерно наличие нескольких видов симметричных структурных схем механизмов (рис. 2).
а б
Рис. 1. Виды симметричных структурных схем механизмов с ЗСТК с диаметрами равной величины
а б
в г
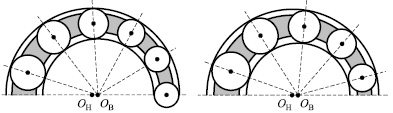
Рис. 2. Виды симметричных структурных схем механизмов с ЗСТК с диаметрами разной величины
Анализ структурных схем механизмов с ЗСТК, приведенных на рис. 1 и 2, указывает на наличие горизонтальной оси симметрии при отсутствии вертикальной оси, что обеспечивает существование нескольких видов симметричных структурных схем [2].
Каждая симметричная структурная схема (рис. 1, 2) может быть реализована как с зазором между телами качения, так и при отсутствии данного параметра в структуре механизма. В результате получаем, что для механизмов с ЗСТК с диаметрами равной величины имеют место два варианта условия симметрии [9]:
Вариант 1. На горизонтальной оси расположены два тела качения (рис. 1, а).
Вариант 2. На горизонтальной оси расположено одно тело качения (рис. 1, б).
При диаметрах разной величины существуют четыре варианта условия симметрии [9]:
Вариант 1. На горизонтальной оси расположено два тела качения: максимальное и минимальное (рис. 2, а).
Вариант 2. На горизонтальной оси расположено только максимальное тело качения (рис. 2, б).
Вариант 3. На горизонтальной оси расположено минимальное тело качения (рис. 2, в).
Вариант 4. На горизонтальной оси нет тел качения (рис. 2, г).
Учет указанных вариантов условия симметрии позволил усовершенствовать ранее разработанный метод решения задачи по определению номинальных величин геометрических параметров механизмов с замкнутой системой тел качения с диаметрами как равной, так и разной величины для обоих направлений ввода поправки в расчет для любого вида симметричных структурных схем (рис. 1). Дальнейшие исследования позволили разработать алгоритмы определения кинематических и силовых параметров механизмов данного вида. Полученные результаты дали возможность авторам формировать привода технологических машин на базе механизмов с замкнутой системой тел качения, обладающих требуемыми свойствами и показателями качества. С целью повышения эффективности как научных исследований, так и конструкторских разработок авторами разработано программное обеспечение, которое представляет собой программный комплекс «Эксцентрик», зарегистрированный в Реестре программ для ЭВМ Федеральной службы по интеллектуальной собственности (РОСПАТЕНТ № 2012614197).
Авторами разработан и изготовлен ряд технологических машин на базе механизмов с замкнутой системой тел качения, конструкторское решение которых абсолютно отличается от всех ранее известных механизмов подобного вида.
Одним из таких механизмов является насадка, которая позволяет расширить функциональное применение ручной сверлильной электрической машины марки ИЭ-1036Э ТУ 16-95. С целью исключения осевых сил в конструкции насадки с ЗСТК предусмотрено наличие компенсаторов осевых усилий. Использование насадки с механизмом с замкнутой системой тел качения обеспечивает преобразование вращательного движения шпинделя ручной сверлильной электрической машины в сложное движение рабочего органа. В зависимости от вида инструмента насадка с механизмом с ЗСТК позволяет использовать ручную сверлильную электрическую машину в качестве: смесителя (рис. 3, а), затирочной машины, шлифовальной или полировальной машины (рис. 3, б).
В процессе эксплутационных испытаний ручной сверлильной электрической машины с механизмом с замкнутой системой тел качения в качестве смесителя подтверждена ее работоспособность, а также более высокая интенсивность перемешивания. Испытания проводились при смешивании краски и приготовлении штукатурного раствора. В результате установлено, что время приготовления раствора с использованием механизма с замкнутой системой тел качения снижается. При использовании ручной сверлильной электрической машины с насадкой механизма с ЗСТК для выполнения затирочных операций выявлено сокращение времени на их проведение по сравнению с периодом времени, затрачиваемым при использовании специализированных машин фирм Bosch и Makita при наличии схожего по качеству результата [2].
Примером других устройств, разработанных на базе механизмов с замкнутой системой тел качения (рис. 4), является технологическая машина, предназначенная для шлифования и полирования плоских поверхностей [1, 2].
Данная машина приводится в движение электродвигателем, к которому крепится рабочий орган с механизмом с замкнутой системой тел качения. Стружка и пыль, образующиеся в процессе обработки поверхностей, удаляются из рабочей зоны с помощью вентилятора или подключаемого пылесоса, через специальный канал, который выполнен в защитном кожухе технологической машины. Отводной канал посредством патрубка связан с бункером, в котором происходит утилизация отходов, получаемых при реализации данного вида технологической операции. Исключение попадания отходов обработки в рабочую зону обеспечивает более высокое качество обработки поверхности.


а б
Рис. 3. Виды функционального применения ручной сверлильной электрической машины с механизмом с ЗСТК

Рис. 4. Рабочий орган технологической машины с механизмом с замкнутой системой тел качения
Заключение
По результатам проведенных исследований авторами опубликовано более 50 научных работ как в журналах РФ, так и в зарубежных изданиях, а также издана одна монография и защищены две диссертации. Используя результаты исследования, авторы разработали программное обеспечение, которое представляет собой программный комплекс «Эксцентрик», зарегистрированный в Реестре программ для ЭВМ Федеральной службы по интеллектуальной собственности (РОСПАТЕНТ № 2012614197). Это позволяет повысить эффективность формирования технологических машин на базе механизмов с ЗСТК, обладающих требуемыми свойствами и показателями качества. Разработанные и изготовленные технологические машины с механизмами с замкнутой системой тел качения показали хорошую работоспособность и подтвердили при сравнительных работах со специализированными машинами фирм Bosch, Makita и PEUGEOT преимущество над ними по габаритным размерам, массе и времени выполнения технологических операций при получении схожего по качеству результата.
Рецензенты:Меновщиков В.А., д.т.н., профессор кафедры «Прикладная механика», ФГАОУ ВПО «Сибирский федеральный университет», г. Красноярск;
Носков М.В., д.ф.-м.н., профессор-наставник, руководитель НУЛ методики электронного обучения кафедры ПМиКБ, Институт космических и информационных технологий, ФГАОУ ВПО «Сибирский федеральный университет», г. Красноярск.
Работа поступила в редакцию 01.04.2015.
Библиографическая ссылка
Мерко М.А., Колотов А.В., Мерко И.С., Митяев А.Е., Кайзер Ю.Ф., Лысянников А.В., Лысянникова Н.Н., Белякова С.А., Литвинов П.С., Бурова В.В. ТЕХНОЛОГИЧЕСКИЕ МАШИНЫ НА БАЗЕ МЕХАНИЗМОВ С ЗАМКНУТОЙ СИСТЕМОЙ ТЕЛ КАЧЕНИЯ // Фундаментальные исследования. 2015. № 2-11. С. 2344-2349;URL: https://fundamental-research.ru/en/article/view?id=37443 (дата обращения: 02.07.2026).