


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
ON THE DETERMINATION OF DEPENDENCE OF THE VELOCITY OF THE CAR FROM THE VISIBILITY DISTANCE ON THE CURVE PLAN

Допустимую скорость движения на участке с криволинейной траекторией выбираем исходя из требования полной остановки автомобиля в пределах зоны видимости без потери устойчивости. При расчете примем следующие допущения:
1. В процессе торможения движение останется управляемым, водитель удерживает автомобиль в пределах полосы движения. Будем считать, что радиус поворота на всем участке торможения остается постоянным.
2. Величина угловой скорости поворота управляемых колес мала.
3. Водитель осуществляет торможение таким образом, что полностью используются тормозные свойства наименее нагруженного колеса.
4. Коэффициент сопротивления увода шин мало зависит от изменения нагрузок на шину.
5. Сопротивление качению мало.
Из теории движения автомобиля известно [1], что при криволинейном движении ускорение центра тяжести автомобиля может быть найдено следующим образом:
 (1)
(1)
 (2)
(2)
где jx, jy – соответственно ускорения, действующие в поперечном и продольном направлениях; ν – мгновенная скорость автомобиля; R – радиус поворота; L – база автомобиля; b – расстояние от центра тяжести до оси заднего моста; θ – угол поворота управляемых колес.
Поперечные реакции (рис. 1), действующие на передний и задний мосты автомобиля, определяются по выражениям
 (3)
(3)
 (4)
(4)
где дополнительно обозначено:
Ma – масса автомобиля; a – расстояние от центра тяжести до оси переднего моста; ρ – радиус инерции автомобиля относительно вертикальной оси, проходящей через центр тяжести.
В этих выражениях  , если происходит ускоренное движение автомобиля.
, если происходит ускоренное движение автомобиля.
При криволинейном движении автомобиля под действием поперечной силы кузов автомобиля поворачивается относительно оси крена на угол ψ (рис. 1). Угол крена кузова в данном случае может быть найден по выражению
 (5)
(5)
где Mn – подрессоренная масса; hψ – плечо крена (расстояние от центра тяжести подрессоренной массы до оси крена);  – угловые жесткости передней и задней подвески.
– угловые жесткости передней и задней подвески.
При приближенных расчетах в знаменателе выражения (5) можно не учитывать второе слагаемое. Тогда угол крена определяется по выражению
 (6)
(6)
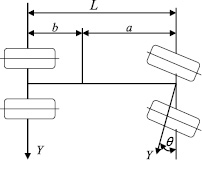
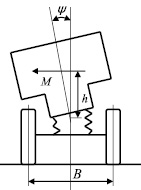
Рис. 1. Схема сил, действующих на автомобиль при его движении на повороте
Вследствие крена кузова автомобиля реакция на внутренних колесах уменьшается, а на внешних возрастает на величину 

 (7)
(7)
где B1 и B2 соответственно колеи переднего и заднего мостов автомобиля.
Подставляя уравнение (6) в (7), имеем
Нормальные реакции на внутренних колесах

 (8)
(8)
Реакции  и
и  – определяются по выражениям
– определяются по выражениям

 (9)
(9)
где hg – высота центра тяжести автомобиля.

 (10)
(10)
В этих выражениях


Продольная составляющая горизонтальной реакции дороги внутреннего колеса, которая может быть использована для торможения автомобиля, находится из соотношений

 (11)
(11)
Если коэффициент сцепления на дороге меньше расчетного по оптимальному торможению, то ограничение интенсивности торможения происходит по опасности потери управляемости автомобиля вследствие юза передних колес. Рассмотрим процесс торможения в этом случае. Суммарная тормозная сила, развиваемая автомобилем в этом случае, будет
 (12)
(12)
где βT – коэффициент распределения тормозной силы, который соответственно равен

Замедление автомобиля связано с тормозной силой соотношением
 (13)
(13)
Тогда ускорение, направленное вдоль оси автомобиля jx, исходя из (2), определяется выражением
 (14)
(14)
Или же при заданном значении jx тормозная сила PT должна быть равна

В данном случае знак (–) указывает, что сила PT направлена в сторону, противоположную движению автомобиля, обычно слагаемое  значительно меньше продольного ускорения. Поэтому при приближенных расчетах можно принять
значительно меньше продольного ускорения. Поэтому при приближенных расчетах можно принять
 (15)
(15)
В данном выражении знак силы принят положительным, т.к. направление силы учтено в формулах, определяющих перераспределение нормальных реакций при торможении. Тогда из формул (12) и (15) имеем
 (16)
(16)
Если принять условие, что отношение продольной и поперечной составляющих у внутреннего переднего колеса определяется из выражения:  , то из (11) и (16) получим уравнение для нахождения допустимого замедления автомобиля:
, то из (11) и (16) получим уравнение для нахождения допустимого замедления автомобиля:
 (17)
(17)
Или, используя выражение (10), имеем

После преобразования получим
 (18)
(18)
Аналогичным способом, если принять условие, что ограничение тормозной силы происходит по блокировке колес заднего моста, получим следующие:




 (19)
(19)
В выражениях замедления обозначение показывает, что расчет проводится с учетом зависимости сцепления от скорости, а именно
 (20)
(20)
где φ0 – коэффициент сцепления, замеренный при малой скорости; A – коэффициент, зависящий от состояния покрытия, типа шины и скорости движения (А = 0,015...0,03).
Если коэффициент сцепления на дороге меньше расчетного по оптимальному торможению, то ограничение интенсивности торможения происходит по опасности потери управляемости автомобиля вследствие юза передних колес. В этом случае допустимое замедление автомобиля находится по формуле (18).
Если коэффициент сцепления на дороге больше расчетного по оптимальному торможению, то ограничение тормозной силы происходит по блокировке колес заднего моста. Допустимое замедление в этом случае определяют по формуле (19). Двойным интегрированием формулы (18) или (19) определяется тормозной путь автомобиля Sτ.
Полный остановочный путь автомобиля  складывается из пути, проходимого автомобилем за время реакции S0, и тормозного пути Sτ:
складывается из пути, проходимого автомобилем за время реакции S0, и тормозного пути Sτ:

Длина пути S0 зависит от начальной скорости автомобиля v0, продолжительности реакции водителя tp, времени срабатывания привода tпр и времени нарастания замедления tз.
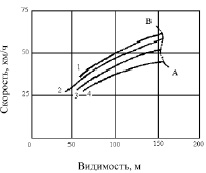
Рис. 2. Зависимость скорости движения автомобиля от расстояния видимости на кривых в плане (R = 100): 1, 2, 3 и 4 при коэффициенте сцепления соответственно 0,8; 0,6; 0,4; 0,3
Таким образом
 (21)
(21)
Сопоставляя полный остановочный путь с имеющейся зоной видимости, определяем допустимую скорость движения.
Расчет допускаемой скорости движения производится для грузового автомобиля, у которого неоптимальная развесовка, тормозная система с большим запаздыванием. Водитель имеет замедленную реакцию.
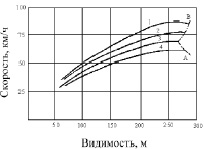
Рис. 3. Зависимость скорости движения автомобиля от расстояния видимости на кривых в плане (R = 200 м): 1, 2 ,3 и 4 – при коэффициенте сцепления соответственно 0,8; 0,6; 0,4; 0,3
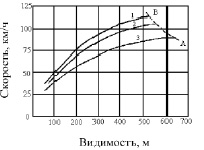
Рис. 4. Зависимость скорости движения автомобиля от расстояния видимости на кривых в плане (R = 500 м): 1, 2, 3 – при коэффициенте сцепления соответственно 0,7; 0,5; 0,3
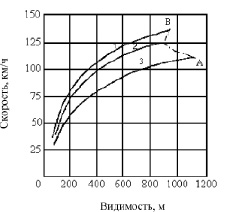
Рис. 5. Зависимость скорости движения автомобиля от расстояния видимости на кривых в плане (R = 1000 м): 1, 2, 3 – при коэффициенте сцепления соответственно 0,7; 0,5; 0,3
Линия АВ на рис. 2–5 соответствует значению предельных скоростей, превышение которых, согласно теоретическим расчетам может привести к потере устойчивости автомобиля.
Рецензенты:Сушков С.И., д.т.н., профессор кафедры технологии и машин лесозаготовок, ФГБОУ ВПО «Ухтинский государственный технический университет», г. Ухта;
Павлов А.И., д.т.н., профессор кафедры лесных, деревообрабатывающих машин и материаловедения, ФГБОУ ВПО «Ухтинский государственный технический университет», г. Ухта.
Работа поступила в редакцию 18.03.2015.
Библиографическая ссылка
Бурмистрова О.Н., Тимохова О.М., Пластинина Е.В. К ВОПРОСУ ОПРЕДЕЛЕНИЯ ЗАВИСИМОСТИ СКОРОСТИ ДВИЖЕНИЯ АВТОМОБИЛЯ ОТ РАССТОЯНИЯ ВИДИМОСТИ НА КРИВЫХ В ПЛАНЕ // Фундаментальные исследования. 2015. № 2-10. С. 2074-2078;URL: https://fundamental-research.ru/en/article/view?id=37359 (дата обращения: 02.08.2026).