


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
ANALYSIS TO NOISE-IMMUNITY INFORMATION-MEASURING SYSTEMS

Проблема помехоустойчивости информационно-измерительных систем является одной из важнейших проблем современной теории передачи информации. Эта проблема возникает при проектировании и эксплуатации информационно-измерительных систем, имеющих ограниченный энергетический потенциал. Это, прежде всего, относится к информационно-измерительной технике, в которой в качестве носителя информации используется оптическое излучение.
Оптоэлектронные информационно-измерительные системы передачи информации эффективно работают при условии, что соотношение «сигнал/шум» на входе приемника излучения превышает некоторое пороговое значение. Уменьшение соотношения «сигнал/шум» на входе приемника излучения при работе в области порога приводит к быстрому росту погрешности измерения и, соответственно, к резкому ухудшению качества измерения [1].
До настоящего времени нет единых и четких определений для порогового режима, порогового сигнала и порогового соотношения «сигнал/шум». Разные авторы вводят различные определения [4, 5, 6, 7, 9].
Работа информационно-измерительных систем при пороговых режимах мало изучена. Известно лишь, что вместе с полезным сигналом через элементы оптоэлектронной информационно-измерительной системы практически всегда проходят помехи, называемые шумами, которые могут генерироваться и в самих элементах системы. Накладываясь на полезный сигнал, эти помехи искажают его параметры, что неизбежно ведет к возникновению погрешностей измерения. В большинстве случаев эти помехи являются случайными, статистические характеристики которых зависят от характера задачи, структуры и состава элементов оптоэлектронной информационно-измерительной системы. Для уменьшения инерционности оптоэлектронной информационно-измерительной системы и снижения значения ее динамических погрешностей полоса пропускаемых частот частотной характеристики системы расширяется, что ведет к повышению уровня помех и росту искажений параметров полезного сигнала от них. Таким образом, тенденции изменения динамических погрешностей и погрешностей от шумов при уменьшении инерционности информационно-измерительных систем противоположны, и существуют такие параметры системы, определяющие ее частотную передаточную функцию, при которых сумма динамической погрешности и погрешности от шумов будет минимальной для заданных условий работы.
На стадии предварительного проектирования из суммарной допустимой дисперсии погрешности оптико-электронной информационно-измерительной системы σ2Σдоп сначала оценивают сумму дисперсий методической и инструментальной погрешностей, а затем определяют ту часть погрешности, которая может иметь место при функционировании системы из-за динамической погрешности и погрешности от шумов по формуле [3, 7]:
 (1)
(1)
Из формулы (1) видно, что при уменьшении погрешности от шумов можно увеличить предельное значение составляющей динамической погрешности, не выходя за рамки σ2Σдоп. При этом можно увеличить полосу пропускаемых частот частотной характеристики и, соответственно, максимально допустимую скорость движения подвижного отражателя при работе устройства.
Другим немаловажным фактором является то, что интенсивность оптического излучения для информационно-измерительных систем уменьшается с увеличением измеряемого расстояния. Падение амплитуды переменной составляющей интерференционного сигнала описывается выражением [8]
 (2)
(2)
где 
 Zоп – длина опорного плеча; L – длина измерительного плеча; A – интенсивность соответствующих переменных сигналов в плечах, поступающих на фотоприемник; θ и λ – расходимость и длина волны излучения; r0 – радиус минимального сечения лазерного пучка.
Zоп – длина опорного плеча; L – длина измерительного плеча; A – интенсивность соответствующих переменных сигналов в плечах, поступающих на фотоприемник; θ и λ – расходимость и длина волны излучения; r0 – радиус минимального сечения лазерного пучка.
Интенсивность лазерного оптического пучка при измеряемом расстоянии L = 60 м уменьшается на порядок. При этом уменьшается контраст интерференционных полос на фотоприемнике, который определяется выражением [4, 7]
 (3)
(3)
где I1, I2 – интенсивности опорного и измерительного лучей;  , I1 + I2 – переменная и постоянная составляющие интенсивности на фотоприемнике.
, I1 + I2 – переменная и постоянная составляющие интенсивности на фотоприемнике.
При L > 60 м снижается мощность принимаемых оптических сигналов на фотоприемнике, ведущая к неработоспособности системы из-за больших помех. Поэтому для измерения на расстояниях L > 60 м, а также измерения нескольких координат при использовании одного оптического источника актуальна задача повышения соотношения «сигнал/шум» измерительного сигнала.
Точность измерения физического параметра с помощью лазерных интерферометров зависит от определения действительного значения длины волны лазерного излучения в воздухе λвозд. Определение λвозд производится посредством измерения коэффициента преломления воздуха nвозд и при известном значении длины волны лазерного излучения в вакууме. Расчетное значение λвозд определяется по формуле
 (4)
(4)
где lвак – значение длины волны лазерного излучения в вакууме.
Показатель преломления сухого воздуха при нормальных условиях на длине волны гелий-неонового лазера 0,63299138 мкм составляет nн = 1,0002765. Изменение температуры, давления и влажности воздуха учитывается соотношением [8]
 (5)
(5)
где t – температура, °С; P – давление воздуха, мм рт. ст.; p – парциальное давление водяного пара, мм рт. ст.
Параметры t, P, p определяются с помощью датчиков температуры, давления и влажности, имеющих унифицированные выходные сигналы. Затем осуществляется вычисление Δn. Если в качестве коэффициента масштабного преобразования в блоке индикации интерферометра записано значение длины волны лазера для нормальных условий воздуха λн, то отклонение оперативно вводится в качестве поправок на результат измерений:
 (6)
(6)
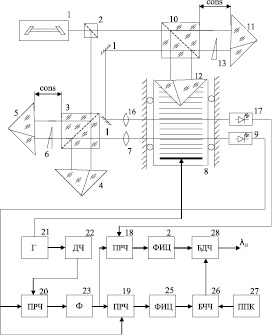
Схема информационно-измерительной системы для определения действительного значения длины волны лазерного излучения
Недостатком такого способа определения λвозд. является то, что коэффициент преломления воздуха nвозд. определяется в локальных точках пространства, часто удаленных от трассы измерения. Неопределенность закона распределения коэффициента преломления вдоль трассы, по которой перемещается подвижный отражатель интерферометра, приводит к неопределенности среднего действительного значения длины волны лазерного излучения на всем участке измерения [2].
На рисунке представлена разработанная схема для определения действительного значения длины волны лазерного излучения для интерференционных измерений [10].
Исходное лазерное излучение от источника 1 через светоделительный элемент 2 направляют в два независимых интерференционных канала, каждый из которых может быть сформирован различными типами интерферометров. После прохождения первого интерференционного канала, образованного светоделительным элементом 3, жестко скрепленных с ним уголковыми отражателями 4, 5 и оптическим клином 6, два интерференционных световых пучка направляют после фокусирующей системы 7 для просвечивания через акустооптический модулятор 8. Световые пучки распространяются под углом друг к другу, кратным углу дифракции.
После пространственного разделения в фокальной плоскости фокусирующей системы совмещенные по направлению, но различные по временным частотам дифракционные порядки, направляют на фотоприемник 9. Например, на фотоприемнике могут быть «0»-й дифракционный порядок от информационной световой волны и «+1»-й дифракционный порядок от референтной световой волны. С выхода фотоприемника 9 выделяют сигнал, следующий на несущей частоте, равной разности фотосмешиваемых частот.
Второй интерференционный канал образован светоделительным элементом 10, уголковым отражателем 11, жестко скрепленным с акустооптическим модулятором уголковым отражателем 12 и оптическим клином 13. После прохождения этого канала два интерференционных световых пучка, распространяющихся под углом, кратным углу дифракции друг к другу, направляют через поворотные зеркала 14 и 15 после фокусирующей системы 16 также для просвечивания через акустооптический модулятор 8.
В данной схеме фотоприемники 9 и 17 регистрируют информацию отдельно о перемещении акустооптического модулятора и о перемещении подвижного отражателя интерферометра и акустооптического модулятора. Электрические сигналы с фотоприемников направляют на преобразователи частоты 18 и 19. Электрический сигнал с фотоприемника 9 также направляют на преобразователь частоты 20, где происходит перенос его на другую несущую частоту при помощи однополосной амплитудной модуляции. На второй вход преобразователя частоты 20 подают электрический сигнал с генератора частоты 21 через делитель 22. С выхода преобразователя частоты 20 электрический сигнал через фильтр 23 подают на вторые входы преобразователей частоты 18 и 19. В преобразователе частоты 18 выделяют сигнал разностной частоты (фазы) между электрическими сигналами с преобразователей частоты 20 и фотоприемника 17. Фаза выходного сигнала с преобразователя частоты 18 смещается синфазно фазе световой волны. Электрические сигналы с преобразователей частот 18 и 19 подают на фазометры 24 и 25. В цифровых интегрирующих фазометрах 24 и 25 происходит счет значений периодов (фаз) световой и ультразвуковой волн, уложившихся в расстоянии, равном перемещению акустооптического модулятора. Электрический сигнал с фазометра 25 показывает значение числа периодов (фаз) ультразвуковой волны, уложившейся в расстоянии, равном перемещению акустооптического модулятора. Этот электрический сигнал направляют в блок умножения чисел 26, где происходит умножение его на значение длины волны ультразвука с панели преднабора константы 27, которая при данном способе является метрологической константой. С выхода блока умножения чисел 26 электрический сигнал подают в блок деления чисел 28, где происходит его деление на значение числа периодов (фаз) световой волны, уложившихся в расстоянии, равном перемещению акустооптического модулятора, полученное с фазометра 24. С блока деления чисел 28 получают электрический сигнал, равный действительному усредненному по трассе измерения значению длины волны лазерного излучения.
Погрешность определения значения длины волны оптического излучения не превышает ±1,5∙10–9, следовательно, и максимальная накопленная погрешность измерения длины волны лазера на участке, где проводилось определение λд, не превышает этого значения [6].
Использование протяженного акустооптического модулятора в качестве устройства воспроизведения эталонных линейных перемещений повышает точность измерения действительного значения длины волны лазерного излучения.
Рецензенты:
Таранцева К.Р., д.т.н., профессор, проректор по научной работе, заведующая кафедрой «Биотехнология и техносферная безопасность», Пензенский государственный технологический университет, г. Пенза;
Ломтев Е.А., д.т.н., профессор кафедры «Информационно-измерительная техника и метрология», Пензенский государственный университет, г. Пенза.
Работа поступила в редакцию 09.02.2015.
Библиографическая ссылка
Базыкин С.Н., Базыкина Н.А. АНАЛИЗ ПОМЕХОУСТОЙЧИВОСТИ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ СИСТЕМ // Фундаментальные исследования. 2015. № 3. С. 19-22;URL: https://fundamental-research.ru/en/article/view?id=37077 (дата обращения: 07.06.2026).