


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
METHOD OF MINIMUM ORDER FILTER DESIGNING FOR TURBOGENERATOR DIAGNOSTIC SYSTEM

В рамках разработки функциональной системы диагностики витковых замыканий в обмотке ротора синхронного генератора (СГ) требуется выделить полезный сигнал с датчика магнитного поля рассеяния, пропорциональный величине повреждения [2–5]. Способ, лежащий в основе разрабатываемой системы диагностики, основан на выделении из синусоидального сигнала ЭДС на выходе датчика информационного сигнала путем преобразования ЭДС в однополярный сигнал, из которого отфильтровывается субгармоническая равная частоте вращения ротора СГ (f1 = fs/p, где fs – частота сети; p – количество пар полюсов СГ). Сложность задачи заключается в малой величине полезного сигнала – 1,5…3 % от основной гармоники – и наличии большого количества шумов – высших гармонических, импульсных шумов и т.д.
Целью статьи является изложение методики синтеза цифрового фильтра минимального порядка, необходимого для выделения полезного сигнала системы функциональной диагностики виткового замыкания в обмотке ротора СГ.
Постановка задачи
Требуется синтезировать оптимальный полосовой фильтр, способный надёжно выделить информационную субгармоническую с частотой f1 = fs/p.
Синтез фильтра
Для устройства диагностики требуется низкочастотный полосовой фильтр (ПФ), который эффективно подавляет постоянную составляющую и гармонические удвоенной f1 и выше частоты, а f1 пропускает и усиливает. При этом в соответствии с требованиями необходимо получить наименьший порядок ПФ при заданном уровне подавления.
ПФ выполнен в виде последовательно соединенных фильтра высоких частот (ФВЧ), задача которого состоит в подавлении постоянной составляющей сигнала, и фильтра низких частот (ФНЧ), подавляющего гармонические удвоенной f1 и выше частоты.
Исходя из специфики работы ПФ, в данном случае каких-либо особых требований к порядку ФВЧ не предъявляется.
Оптимизация ПФ производилась путем сравнения порядка ФНЧ фильтров Баттерворта, Чебышева и эллиптического при заданном уровне подавления.
На первом этапе определяется соотношение амплитуд – А полезного к общему уровню сигнала, что позволяет вычислить необходимый уровень подавления RS:
 (1)
(1)
Из [2, 5] ясно, что минимально необходимый уровень выделяемого сигнала Δe = 1,5 % от общего уровня. На рис. 1 приведена зависимость необходимого уровня подавления от уровня полезного сигнала. Для минимально возможного Δe = 1,5 % необходим уровень подавления RS = 60 дБ.
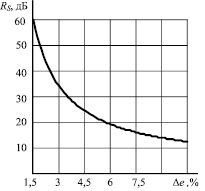
Рис. 1. Величина подавления от уровня полезного сигнала
Взяв за основу фильтры Баттерворта, Чебышева и эллиптический фильтр, по формулам (2), (3) и (4) определили порядки фильтров с уровнем подавления RS = 60 дБ. На рис. 2 приведена зависимость необходимого порядка фильтров от уровня полезного сигнала Δe при заданном уровне подавления [1, 6].
Порядок ФНЧ по аппроксимации Баттерворта:
 . (2)
. (2)
Порядок ФНЧ по аппроксимации Чебышева:
 . (3)
. (3)
Порядок ФНЧ по аппроксимации Кауэра:
 (4)
(4)
где Nb, Nch, Nk – порядок фильтров Баттерворта, Чебышева и эллиптического фильтра; RP – уровень искажения сигнала в полосе пропускания; RS – уровень подавления шума; ω0 – частота пропускания; ω1 – частота подавления; arch – гиперболический арккосинус; К – полный эллиптический интеграл; K′ – комплементарный эллиптический интеграл.
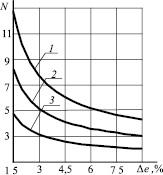
Рис. 2. Зависимость порядка фильтров от уровня полезного сигнала Δe при заданном уровне подавления: 1 – по Баттерворту; 2 – по Чебышеву; 3 – по Кауэру
Исходя из требования наименьшего порядка для минимально возможного ∆е, в качестве оптимального определен эллиптический фильтр.
Для системы диагностики СГ, при заданной величине полезного сигнала на выходе датчика Δe = 1,5 % был разработан эллиптический ПФ, при этом его порядок составил Nk = 5, уровень подавления RS = 60 дБ, уровень искажения сигнала в полосе пропускания RP = 0,5 дБ.
В частном случае в качестве примера строился ПФ, состоящий из ФВЧ и ФНЧ звена для f1 = 50 Гц. На рис. 3 приведена ЛАЧХ разработанного фильтра. Как видно из рис. 3, уровень подавления шума на частоте 2fs = 100 Гц составил не менее 60 дБ, что полностью удовлетворило требованиям, предъявляемым к ПФ.
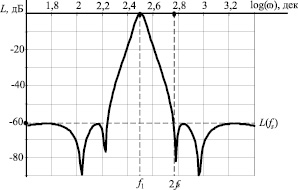
Рис. 3. ЛАЧХ ПФ
Экспериментальная проверка ПФ проводилась на базе системы диагностики от виткового замыкания обмотки ротора лабораторного синхронного генератора ГАБ-4-Т/230. В качестве источника информации использовался индукционный датчик магнитного поля рассеяния. Сигнал с датчика преобразовывался в однополярный (выпрямлялся) и проходил через разработанный ПФ. В ходе эксперимента проводилось физическое замыкание 2 % витков обмотки ротора. На рис. 4 приведены результаты этого эксперимента. На участке I выпрямленный синусоидальный сигнал симметричен, а на участке II симметрия нарушена вследствие виткового замыкания 2 % витков обмотки ротора. При замыкании обмотки на выходе ПФ (Vвых) наблюдался усиленный в 60 раз полезный сигнал Vвых. ПФ качественно выделил полезный.
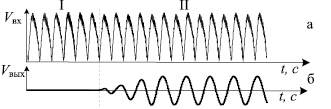
Рис. 4. Фильтрация экспериментального сигнала: I – симметричный сигнал, II – сигнал с несимметрией ∆е = 2 %
Выводы
1. В процессе синтеза полосового фильтра получены зависимости, позволяющие строить цифровой фильтр минимального порядка, удовлетворяющий требованиям по уровню подавления неинформативных гармоник.
2. В ходе экспериментальной проверки доказана эффективность работы разработанного фильтра минимального.
Рецензенты:
Хрущев Ю.В., д.т.н., профессор кафедры ЭСиЭ ЭНИН, ФГАОУ ВПО «Национальный исследовательский Томский политехнический университет», г. Томск;
Лукутин Б.В., д.т.н., профессор кафедры ЭПП ЭНИН, ФГАОУ ВПО «Национальный исследовательский Томский политехнический университет», г. Томск.
Работа поступила в редакцию 18.11.2014.
Библиографическая ссылка
Васильева Ю.З., Елгина Г.А. МЕТОДИКА ПОСТРОЕНИЯ ФИЛЬТРА МИНИМАЛЬНОГО ПОРЯДКА ДЛЯ ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ ГЕНЕРАТОРА // Фундаментальные исследования. 2014. № 11-9. С. 1897-1900;URL: https://fundamental-research.ru/en/article/view?id=35864 (дата обращения: 01.07.2026).