


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
STRUCTURE DESIGN OF THE INFORMATION MEASUREMENT SYSTEM FOR MOBILE PLATFORM ENERGY MONITORING

В последнее время уделяется очень много внимания окружающей среде, а именно снижению воздействия факторов, которые её загрязняют. Одним из них являются выхлопные газы автомобилей. В связи с этим наметилась тенденция к экологически чистому транспортному средству, в рамках города – это городской электрифицированный транспорт. Специалисты утверждают, что электротранспорт может вытеснить дизельные автомобили уже в конце текущего десятилетия. Вследствие чего возникает ряд вопросов, связанных с эффективным использованием электроэнергии на электротранспортных средствах [9]. Ответы на вопросы можно получить при использовании системы энергомониторинга (СЭМ) [7] на модели электромобиля, в качестве которой выступает мобильная интеллектуальная платформа (МИП) [2].
Функции системы энергомониторинга
После рассмотрения существующих систем выделим требования и функции, которые должна выполнять СЭМ [8]: фиксация положения МИП на карте, её маршрута; контроль уровня заряда батареи, потребляемого тока и скорости движения МИП; мониторинг погодных условий и др. Данные, полученные на основе выполняемых функций, должны быть наглядно представлены пользователю СЭМ.
В зависимости от вида платформы исполнение системы может быть трех типов, краткое описание которых представлено в таблице.
Объект энергомониторинга
Для обеспечения функции энергомониторинга возьмем МИП, представляющую собой четырехколесную платформу с приводом на все колеса. Исходя из концепции трехуровневой автоматизированной системы [3], структурная схема, представленная на рис. 1, содержит: первый – полевой подуровень, который включает в себя набор датчиков и исполнительных механизмов, второй – контроллерный подуровень включает в себя контроллер управления исполнительными органами, контроллер сбора данных и главный (интеллектуальный) контроллер. Третий уровень – система связи с оператором.
Описание структур систем энергомониторинга
|
Тип исполнения |
Описание |
|
Система навесного типа |
Всё оборудование, необходимое для выполнения функций СЭМ, устанавливается поверх существующих сенсорной (СС) системы и системы управления (СУ) МИП |
|
Интегрированная система |
Для выполнения функций СЭМ используется оборудование СС МИП, а в СУ МИП встраивается ряд задач, которые выполняют функции СЭМ |
|
Система смешанного типа |
Для выполнения функций СЭМ используется оборудование МИП, а для выполнения задачи энергомониторинга используется отдельный контроллер |
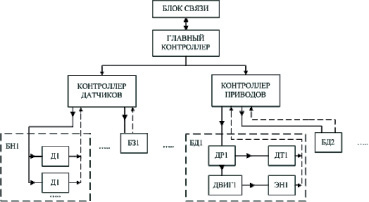
Рис. 1. Структурная схема мобильной платформы: Д – датчик; БН – блок независимых датчиков; БЗ – блок зависимых датчиков; БД – блок двигателя; ДР – драйвер двигателя; Двиг – двигатель; ДТ – датчик тока; ЭН – энкодер
Для управления силовыми исполнительными механизмами в данной системе представлена типовая схема драйвера (рис. 2).
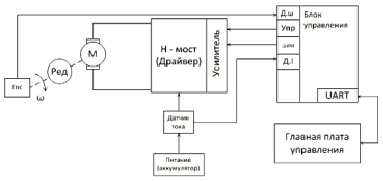
Рис. 2. Блок-схема управления силовыми механизмами платформы МИП
Для управления двигателем в схему включен H-мост на силовых транзисторах. На вход с блока управления приходит сигнал направления вращения, разрешения вращения и выход ШИМ. В схеме организована обратная связь по току и по скорости двигателя. В качестве датчика скорости применяется поворотный энкодер. Связь блока управления осуществляется по порту UART, через который отсылаются команды в блок управления.
Сенсорная подсистема – это совокупность измерительных средств и методов измерений робота, с помощью которых он не только ориентируется в пространстве, но и осуществляет контроль своего состояния и параметров окружающей среды [4].
Уровень дистанционного управления представлен автоматизированным рабочим местом, с которого и поступают команды на интеллектуальную систему управления, систему управления исполнительными механизмами и систему управления сенсорами.
Разработка системы энергомониторинга МИП
Для решения проблемы энергомониторинга мобильной платформы были рассмотрены готовые решения для мобильных объектов. За основу готовой системы были взяты три варианта рассматриваемых систем.
Рассмотрим типовую схему информационно-измерительной и управляющей системы для энергомониторинга МИП [5], представленную на рис. 3.

Рис. 3. Функциональная схема системы энергомониторинга
В системе имеются две батареи питания, у которых необходимо отслеживать температуру для коррекции емкости, напряжение и ток, за счет которых рассчитывается мощность. Для ввода корректирующих параметров и расчета энергопотребления необходимо отслеживать параметры окружающей среды. Чтобы рассчитать потребляемую мощность исполнительными органами, необходимо отслеживать так же параметры двигателей. Для связи с диспетчером применим GSM модуль. Чтобы отследить положение платформы, в системе предусмотрен GPS/Глоннас приемник.
Первый вариант системы рассматривается как полностью автономное решение, выполненное в виде навесного модуля и набора датчиков. Система состоит из двух аккумуляторных батарей робота, первая батарея предназначена для питания силовых нагрузок, представленных исполнительными механизмами, для управления логическими уровнями, они подключены через управляющие драйверы. Вторая батарея меньшей емкости предназначена для питания электроники, датчиков и других маломощных потребителей. Для отслеживания разряда батарей предусмотрены два комплекта датчиков напряжения и тока, путем перемножения которых можно получить потребляемую мощность. Кроме этого, в системе предусмотрены датчики температуры аккумуляторных батарей, так как емкость батарей напрямую зависит от температуры. Таким образом, в зависимости от данного параметра можно ввести поправочный коэффициент, на который будет умножаться номинальная емкость и с целью получения ее действительного значения.
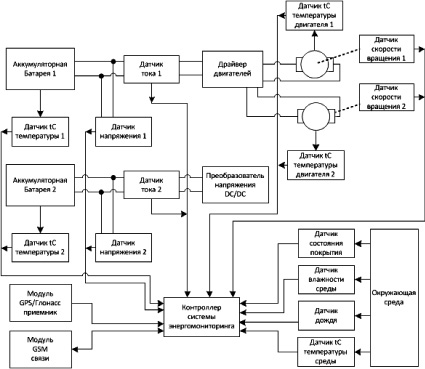
Рис. 4. Автономная система энергомониторинга
Для отслеживания энергопотребления исполнительных органов в системе предусмотрены датчики скорости вращения двигателей и датчики температуры, так как сопротивление обмоток двигателей напрямую зависит от их температуры, можно также ввести коэффициент поправки и спрогнозировать увеличение потребляемой мощности. Для отслеживания параметров окружающей среды установлены датчики температуры, влажности, дождя, состояния покрытия, от всех этих факторов также будет зависеть энергопотребление робототехнической платформы. Достоинствами применения данной системы являются: быстродействие, отказоустойчивость и способность к расширению, кроме того, мы получаем универсальную систему, которая может быть подключена в работу путем добавления. Недостатками являются: потребление энергии самой системой и обеспечение дополнительного пространства на объекте мониторинга.
Второй вариант системы – интегрированная система энергомониторинга. МИП имеет на борту различного рода датчики, которые также отслеживают параметры окружающей среды, скорость двигателей и характеристики аккумуляторных батарей. Наиболее рациональное решение – дополнить систему необходимыми датчиками и модулями, где функции контроллера энергомониторинга вшиты в контроллер робототехнической системы. Таким образом, мы получаем систему, структурная схема которой схожа с системой навесного типа, при этом мы получаем экономию энергии и пространства, упрощаем систему в целом. Недостатки данной системы очевидны, путем перекладывания функций и подключения дополнительных датчиков мы усложняем систему, уменьшаем ее надежность и перегружаем основной контроллер.
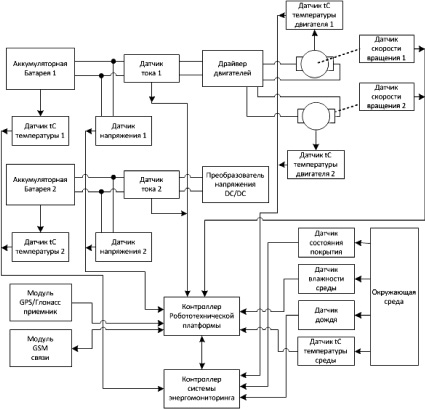
Рис. 5. Структурная схема системы смешанного типа
Третий вариант системы – система смешанного типа, в которой система энергомониторинга интегрирована в систему управления платформой (рис. 5).
Заключение
В предложенных вариантах структурной организации системы энергомониторинга мобильной платформы встроены датчики напряжения и тока, датчики отслеживания параметров окружающей среды, модули связи и навигации. Сбором и передачей измерительной информации управляет основной контроллер платформы, и при его дополнении модулями связи с удаленным сервером можно получить довольно гибкую и надежную систему энергомониторинга подвижного объекта, пригодную для системных исследований энергоэффективности для транспорта [1, 6].
Рецензенты:
Бочкарёв С.В., д.т.н., доцент, профессор кафедры «Микропроцессорные средства автоматизации», ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь;
Щербинин А.Г., д.т.н., доцент, профессор кафедры «Конструирование и технологии в электротехнике», ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь.
Работа поступила в редакцию 06.11.2014.
Библиографическая ссылка
Артемов С.А., Кычкин А.В. РАЗРАБОТКА СТРУКТУРЫ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ ДЛЯ ЭНЕРГОМОНИТОРИНГА МОБИЛЬНОЙ ПЛАТФОРМЫ // Фундаментальные исследования. 2014. № 11-7. С. 1450-1455;URL: https://fundamental-research.ru/en/article/view?id=35785 (дата обращения: 20.06.2026).