


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
TESTING OF VISUAL-MOTOR SYSTEM OF VEHICLE DRIVER USING THE REACTION TO MOVING OBJECT METHOD

Предупреждение и сокращение количества дорожно-транспортных происшествий (ДТП) является одной из актуальных проблем общества. К факторам, обуславливающим возможность ДТП, наряду с другими относятся уровень квалификации водителя, его физические и психофизиологические характеристики [2]. При этом исключительно важное значение имеет время реакции водителя, являющееся интегральным показателем состояния зрительно-моторной системы. Большое время реакции увеличивает риск возникновения ДТП, что может повлечь за собой как экономические потери, так и человеческие жертвы.
Как показано в работе [8], большинство исследователей принимают за время реакции водителя АТС время от момента предъявления внешнего стимула, например светового или звукового сигнала, до адекватного дорожной ситуации воздействия на органы управления АТС, например, нажатия на педаль тормоза, поворота руля или задействования рычага стояночного тормоза.
Профессиональная деятельность водителя АТС как представителя разновидности человеко-машинной системы «водитель – АТС – дорога – среда», сопряжена с возможностью возникновения экстремальных ситуаций, требующих экстренного торможения в условиях, связанных с дефицитом времени.
Время реакции при экстренном торможении состоит из времени обнаружения стимула, осознания и принятия решения о необходимости торможения и первичного движения ноги. В то же время выделяют интервалы времени, соответствующие срабатыванию тормозной системы, нарастанию замедления АТС и непосредственно торможению [3]. В данной работе авторы в качестве зрительно-моторных характеристик водителя АТС рассматривают два интервала времени, первый из которых соответствует времени Tp реакции от момента предъявления стимула до момента касания педали тормоза, второй – времени Tнаж нажатия на педаль тормоза от момента касания педали до окончания нарастания замедления АТС.
Одним из широко распространенных показателей, оценивающих восприятие временных и пространственных характеристик движения, является точность в реакциях на движущийся объект (РДО) [4]. Поскольку классический подход применения метода РДО не предполагает наличия дефицита времени, авторами ранее разработан метод [5], позволяющий определить индивидуальное значение минимального времени, необходимого для зрительного восприятия внезапно появляющейся метки и останова движущегося объекта в момент предполагаемого совпадения его положения с положением метки, при котором сохраняется точность двигательных действий, проявляющаяся в РДО.
Ввиду близости процедуры тестирования предложенным методом и профессиональной деятельности водителя АТС в условиях дефицита времени задача тестирования зрительно-моторной системы водителя АТС предложенным методом РДО является выполнимой.
Цель исследования – показать возможность тестирования зрительно-моторной системы водителя АТС предложенным методом РДО.
Материал и методы исследования
В обследовании приняло участие 15 обученных испытуемых, курсантов автошколы Казанского национального исследовательского технического университета им. А.Н. Туполева, в возрасте от 16 до 20 лет. Измерения выполнялись в первой половине дня с 9 до 12 ч.
Для определения индивидуальных значений зрительно-моторных характеристик водителя АТС проводились измерения по методике, описанной авторами ранее в работе [9].
Испытуемые выполняли серии измерений, в первой из которых задавалось время tзад, равное 0,8 с, обуславливающее дефицит времени при выполнении испытуемым задачи экстренного торможения. Это время необходимо испытуемому для зрительного восприятия появляющегося на экране видеомонитора препятствия, отпускания правой ноги с педали подачи топлива, переноса ее на педаль тормоза и прикосновения к ней (время Tp реакции) и выполнения полного нажатия на нее (время Tнаж).
Если в первой серии измерений испытуемым не было допущено столкновений с препятствием, то уменьшали значение времени tзад на 0,1 с, испытуемый аналогичным образом выполнял вторую и последующие серии измерений с уменьшением времени tзад до тех пор, пока не допустит в очередной серии столкновения с препятствием. В случае если в первой серии измерений испытуемым были допущены столкновения, то увеличивали значение времени tзад на 0,1 с, испытуемый аналогичным образом выполнял вторую и последующие серии измерений до тех пор, пока в очередной серии не допускал столкновений.
Искомое время  реакции принимали равным среднеарифметическому значению
реакции принимали равным среднеарифметическому значению  времени реакции в серии с минимальным значением
времени реакции в серии с минимальным значением  заданного времени, в которой испытуемый не допустил столкновений АТС с препятствием, время
заданного времени, в которой испытуемый не допустил столкновений АТС с препятствием, время  – среднеарифметическому значению
– среднеарифметическому значению  времени нажатия в этой серии.
времени нажатия в этой серии.
Для определения индивидуальных значений  минимального времени, необходимого для зрительного восприятия внезапно появляющейся на экране видеомонитора метки и останова движущегося объекта в момент предполагаемого совпадения его положения с положением метки, проводились измерения времени tотк отклонения – абсолютного значения ошибки несовпадения останова точечного объекта и метки по методике, описанной авторами ранее в работе [5].
минимального времени, необходимого для зрительного восприятия внезапно появляющейся на экране видеомонитора метки и останова движущегося объекта в момент предполагаемого совпадения его положения с положением метки, проводились измерения времени tотк отклонения – абсолютного значения ошибки несовпадения останова точечного объекта и метки по методике, описанной авторами ранее в работе [5].
Испытуемые выполняли серии измерений, в которых последовательно задавалось время tзад, обуславливающее дефицит времени при выполнении испытуемым задачи останова движущегося объекта, последовательно равное 0,1, 0,2, …, 0,8 с. Вычисленное в каждой серии измерений среднеарифметическое значение  времени отклонения отмечалось в координатах «заданное время tзад – оценка
времени отклонения отмечалось в координатах «заданное время tзад – оценка  времени РДО», строился график функции
времени РДО», строился график функции  . На графике определялась точка окончания переходного процесса и начала квазистационарного процесса, в котором наблюдается естественная вариабельность значений
. На графике определялась точка окончания переходного процесса и начала квазистационарного процесса, в котором наблюдается естественная вариабельность значений  времени отклонения, обусловленная стохастичностью организма испытуемых, как сложного биологического объекта. По положению этой точки оценивалось искомое значение
времени отклонения, обусловленная стохастичностью организма испытуемых, как сложного биологического объекта. По положению этой точки оценивалось искомое значение  (абсцисса) и точность двигательных действий, характеризуемая стабилизированным значением времени
(абсцисса) и точность двигательных действий, характеризуемая стабилизированным значением времени  РДО (ордината).
РДО (ордината).
Измерения зрительно-моторных характеристик водителя АТС выполнялись с использованием разработанного аппаратно-программного комплекса контроля навыка торможения водителя АТС «Тест водителя-1» [6], измерения времени отклонения по методу РДО – программы для ПЭВМ оценки времени РДО [7]. Параметры тестирования по обоим методам были схожими друг с другом.
Результаты исследования и их обсуждение
В результате измерений зрительно-моторных характеристик водителя АТС для одного из испытуемых Ш. получены значения, представленные в виде графика на рис. 1. В таблице приведено количество столкновений АТС с препятствием, допущенных испытуемым в сериях измерений.
Таким образом, стабилизация значений времени  реакции испытуемого, равного 0,352 с, и времени
реакции испытуемого, равного 0,352 с, и времени  нажатия на педаль тормоза, равного 58 мс, произошла в серии измерений при минимальном заданном времени
нажатия на педаль тормоза, равного 58 мс, произошла в серии измерений при минимальном заданном времени  , равном 0,5 с.
, равном 0,5 с.
Результаты измерений зрительно-моторных характеристик испытуемого Ш.
|
Заданное время tзад, с |
0,8 |
0,7 |
0,6 |
0,5 |
0,4 |
|
Количество столкновений |
0 |
0 |
0 |
0 |
2 |
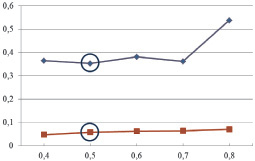
Рис. 1. Графики функций  и
и  испытуемого Ш. По горизонтальной оси – заданное в серии измерений время tзад, с; по вертикальной оси – среднеарифметические значения времени
испытуемого Ш. По горизонтальной оси – заданное в серии измерений время tзад, с; по вертикальной оси – среднеарифметические значения времени  и
и  , с; верхний график – время
, с; верхний график – время  реакции; нижний график – время
реакции; нижний график – время  нажатия на педаль тормоза. Овалами выделены искомые значения времени
нажатия на педаль тормоза. Овалами выделены искомые значения времени  реакции и
реакции и  нажатия на педаль тормоза
нажатия на педаль тормоза
В результате измерений времени отклонения точечного объекта от метки по методу РДО для этого же испытуемого Ш. получены следующие среднеарифметические значения  времени отклонения, мс: 137,9; 59; 21,3; 19,2; 25,5; 26,7; 13,6; 19,6.
времени отклонения, мс: 137,9; 59; 21,3; 19,2; 25,5; 26,7; 13,6; 19,6.
Ввиду вариабельности значений времени отклонения точку ( ;
;  ) выхода графика функции
) выхода графика функции  на плато находили исходя из условия окончания переходного процесса, после которого имеет место неравенство [1]:
на плато находили исходя из условия окончания переходного процесса, после которого имеет место неравенство [1]:
 , (1)
, (1)
где  – среднеарифметическое значение оценок
– среднеарифметическое значение оценок  в квазистационарном процессе;
в квазистационарном процессе;  – вариационный размах значений оценок
– вариационный размах значений оценок  в квазистационарном процессе;
в квазистационарном процессе;  – максимальное значение оценок
– максимальное значение оценок  в квазистационарном процессе;
в квазистационарном процессе;  – минимальное значение оценок
– минимальное значение оценок  в квазистационарном процессе.
в квазистационарном процессе.
При рассмотрении в качестве квазистационарного процесса последовательностей по 3 точки графика, первая из которых удовлетворяет условию (1), получены 2 последовательности при значениях заданного времени tзад 0,3–0,5 с и 0,5–0,7 с. Из них выбрана первая, так как вариационный размах значений оценок  времени РДО в ней меньше. График функции
времени РДО в ней меньше. График функции  показан на рис. 2.
показан на рис. 2.
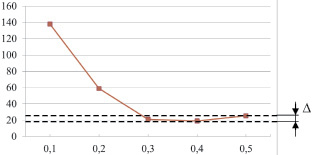
Рис. 2. График функции  испытуемого Ш. По горизонтальной оси – заданное в серии измерений время tзад, с; по вертикальной оси – среднеарифметическое значение
испытуемого Ш. По горизонтальной оси – заданное в серии измерений время tзад, с; по вертикальной оси – среднеарифметическое значение  в серии измерений, мс. Обозначения величин в тексте
в серии измерений, мс. Обозначения величин в тексте
Таким образом, для данного испытуемого стабилизация времени  РДО, равного 23,1 мс, произошла при заданном в серии измерений времени
РДО, равного 23,1 мс, произошла при заданном в серии измерений времени  , равном 0,3 с.
, равном 0,3 с.
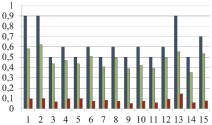
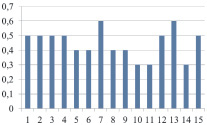
Диаграммы индивидуальных результатов испытуемых по обследованной группе представлены на рис. 3.
Установлено, что индивидуальное значение времени  стабилизации зрительно-моторных характеристик водителя АТС по обследованной группе составило от 0,5 до 0,9 с; значение времени
стабилизации зрительно-моторных характеристик водителя АТС по обследованной группе составило от 0,5 до 0,9 с; значение времени  реакции – от 0,353 до 0,620 с; значение времени
реакции – от 0,353 до 0,620 с; значение времени  нажатия – от 50 до 144 мс; индивидуальное значение времени
нажатия – от 50 до 144 мс; индивидуальное значение времени  стабилизации времени РДО – от 0,3 до 0,6 с; значение времени
стабилизации времени РДО – от 0,3 до 0,6 с; значение времени  РДО – от 10,5 до 30,8 мс.
РДО – от 10,5 до 30,8 мс.
 а
а
 б
б
Рис. 3. Диаграммы индивидуальных результатов измерений по группе из 15 человек: а – результаты измерений зрительно-моторных характеристик водителя АТС; по горизонтальной оси – порядковые номера испытуемых; по вертикальной оси – значения времени, с; столбцы испытуемых слева направо: первый – минимальное заданное время  ; второй – время
; второй – время  реакции; третий – время нажатия; б – результаты измерений времени отклонения методом РДО; по горизонтальной оси – порядковые номера испытуемых; по вертикальной оси – время
реакции; третий – время нажатия; б – результаты измерений времени отклонения методом РДО; по горизонтальной оси – порядковые номера испытуемых; по вертикальной оси – время  стабилизации оценки времени РДО, с.
стабилизации оценки времени РДО, с.
Непараметрический корреляционный анализ значений результатов измерений зрительно-моторных характеристик водителя АТС по обследованной группе показал наличие значимой корреляции заданного времени  со временем
со временем  реакции по коэффициенту R ранговой корреляции Спирмена, составившему 0,904 при уровне значимости p, равном 0,001, а также со временем
реакции по коэффициенту R ранговой корреляции Спирмена, составившему 0,904 при уровне значимости p, равном 0,001, а также со временем  нажатия (R = 0,614, p = 0,015). Таким образом, успешность выполнения экстренного торможения в большей степени зависит от скорости реагирования на опасность, чем от скорости нажатия на педаль тормоза, что также объясняется порядками величин и их значимой корреляцией (R = 0,672, p = 0,006).
нажатия (R = 0,614, p = 0,015). Таким образом, успешность выполнения экстренного торможения в большей степени зависит от скорости реагирования на опасность, чем от скорости нажатия на педаль тормоза, что также объясняется порядками величин и их значимой корреляцией (R = 0,672, p = 0,006).
Анализ взаимосвязи результатов измерений времени отклонения по методу РДО и величин зрительно-моторных характеристик водителя АТС показал наличие значимой корреляции заданного времени  со временем
со временем  (R = 0,583, p = 0,022) реакции водителя АТС и со временем
(R = 0,583, p = 0,022) реакции водителя АТС и со временем  (R = 0,625, p = 0,012) нажатия на педаль тормоза.
(R = 0,625, p = 0,012) нажатия на педаль тормоза.
Заключение
Таким образом, показана возможность применения предложенного метода РДО для тестирования зрительно-моторной системы водителя АТС, что может быть использовано при предрейсовом контроле состояния водителя АТС.
Рецензенты:
Захаров В.М., д.т.н., профессор кафедры компьютерных систем, ФГБОУ ВПО «Казанский национальный исследовательский технический университет им. А.Н. Туполева ‒ КАИ», г. Казань;
Шалагин С.В., д.т.н., доцент кафедры компьютерных систем, ФГБОУ ВПО «Казанский национальный исследовательский технический университет им. А.Н. Туполева ‒ КАИ», г. Казань.
Работа поступила в редакцию 28.07.2014.
Библиографическая ссылка
Песошин А.А, Чернышов Д.Е, Роженцов В.В ТЕСТИРОВАНИЕ ЗРИТЕЛЬНО-МОТОРНОЙ СИСТЕМЫ ВОДИТЕЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА МЕТОДОМ РЕАКЦИИ НА ДВИЖУЩИЙСЯ ОБЪЕКТ // Фундаментальные исследования. 2014. № 8-6. С. 1322-1326;URL: https://fundamental-research.ru/en/article/view?id=34761 (дата обращения: 12.06.2026).