


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
SIMILARITY CRITERIA AND CRITERIAL EQUATIONS FOR SIMULATION OF SPACECRAFT RELATIVE MOTION

В работе рассматривается процесс сближения-стыковки-расхождения (ССР) космических аппаратов (КА) на околоземной орбите на заключительном этапе после вывода активного космического аппарата (АА) на орбиту сближения с пассивным космическим аппаратом (ПА). Стыковка аппаратов в этом случае рассматривается как заключительная фаза этапа сближения, а расстыковка – как начальная фаза их расхождения. Фактически это означает, что речь идет о дистанциях между двумя КА, не превышающих нескольких километров на начальной стадии или десятков-сотен метров на заключительной стадии процесса сближения. Расстыковка как специфический процесс расхождения аппаратов на безопасное расстояние для последующих операций движения в околоземном пространстве формально описывается теми же уравнениями, что и процесс стыковки. В функции ПА в процессе ССР входит ориентация главной оси стыковочного узла по линии визирования (ЛВ) двух КА. Наземный центр управления полетом (ЦУП) на этой стадии не способен, по сути, эффективно управлять собственно процессом ССР КА. При этом реализуют варианты автономного управления процессом ССР как с применением бортовой ЦЭВМ АА и/или ПА, так и в телеоператорном режиме (ТОР) [2, 10]. В качестве ПА может рассматриваться, например, международная космическая станция (МКС), а в качестве АА – пилотируемый или беспилотный транспортный КА одной из стран-участниц международного проекта, например Российские корабли модифицированных серий «Союз» или «Прогресс» при стыковке с российскими сегментами стыковочных модулей МКС.
Актуальность задачи разработки критериальных уравнений обусловлена малой изученностью нелинейных многомерных процессов ССР именно на стадии, когда происходит встреча КА и, соответственно, проблемами, требующими разработки новых подходов к решению задач качественной оценки возможностей управления вблизи так называемых бифуркационных точек фазовых траекторий относительного движения КА [8]. Проблемы стыковки и нештатные ситуации при этом достаточно подробно описаны в [10].
Основная часть
Полагаем, что ПА находится на круговой орбите, дистанция между сближающимися КА много меньше расстояния от них до центра притяжения Земли, а сближение происходит в безгравитационном поле. Примем также иные известные допущения об отсутствии сил аэродинамического сопротивления, о несферичности Земли, неоднородности распределения ее масс и т.п. [2, 8].
При описании относительного движения КА будем использовать одну из наиболее распространенных в практике автономного сближения кораблей визирную систему координат (СК) [2, 4, 8], описывающую процессы ССР в полярной СК. Рассматриваемый динамический процесс после ряда преобразований при переходе от орбитальной к визирной СК в скалярной форме может быть представлен системой дифференциальных уравнений [4, 8]:
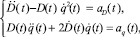 (1)
(1)
где  – соответственно относительное расстояние между стыковочными узлами КА по ЛВ, относительные линейные скорость и ускорение аппаратов;
– соответственно относительное расстояние между стыковочными узлами КА по ЛВ, относительные линейные скорость и ускорение аппаратов;  – относительные угловые скорость и ускорение вращения ЛВ в плоскости орбиты сближающихся аппаратов; aD(t), aq(t) – ортогональные управляющие ускорения центра масс АА, пропорциональные сигналам управления ДУ малой тяги.
– относительные угловые скорость и ускорение вращения ЛВ в плоскости орбиты сближающихся аппаратов; aD(t), aq(t) – ортогональные управляющие ускорения центра масс АА, пропорциональные сигналам управления ДУ малой тяги.
В теории управления двигательными установками (ДУ) КА принято оперировать не «управляющими ускорениями» (понятие, принятое инженерами в области общей теории навигации и управления), а таким эквивалентным понятием, как «импульс скорости». Фактически и в том, и в другом случае речь идет о приращении скорости (м/с), полученной КА в конкретном направлении под действием импульса тяги ДУ за время работы ДУ. Современные электрореактивные двигатели, работающие в режимах малой тяги, способны реализовать, в частности, широтно-импульсное управление приращением скорости с периодами выдачи импульсов тяги, не превышающим нескольких микросекунд [7]. Это позволяет говорить о возможности реализации квазианалогового управления ДУ малой тяги, применяемых в качестве сближающе-корректирующих двигателей или двигателей причаливания и ориентации. При этом реализуется аппроксимация импульсно модулированных управлений их непрерывными зависимостями.
Пусть имеется вторая динамическая система, описываемая уравнениями, аналогичными (1), которую будем рассматривать в качестве имитационной модели:
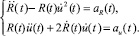 (2)
(2)
Физическая и математическая сущности переменных в уравнениях (2) аналогичны (1). Заметим, что обе математические модели (1) и (2) описывают плоское движение материальных точек в некоторых системах отсчета. Имитационная модель (2) может описывать подобную ей систему сближения двух КА в визирной СК. Тогда начало координат визирной СК помещают в точку визирования ПА, а управляющие ускорения, реализуемые ДУ малой тяги, прикладывают к центру масс АА. Но имитационная модель (2) может описывать и некий наземный испытательный стенд, осуществляющий плоское движение и формирующий в некоторой его точке кажущиеся ускорения (перегрузки), подобные управляющим ускорениям ССР модели (1). Тогда начало координат подвижной СК можно поместить на оси вращения стенда (рис. 1), вдоль радиуса вращения которого перемещают некоторую материальную точку, для которой в силу ее плоского движения справедливы соотношения (2). Тогда, связывая эту материальную точку с центром чувствительности двухосевого акселерометра, можно сформировать в ней два ортогональных ускорения, направленных вдоль радиуса вращения (по оси y) и по касательной к траектории вращения точки (по оси x).
На рис. 1 приняты следующие СК стенда: OX0Y0Z0 – неподвижная (абсолютная) СК; OX1Y1Z1 – подвижная СК, связанная со стендом; mxyz – подвижная СК, связанная с перемещаемой точкой m.
Одна из возможных кинематических структур [5, 6, 9] такого наземного испытательного стенда приведена на рис. 2. Ротационный стенд содержит несущую конструкцию (НК) 1, поворачиваемую вокруг вертикальной оси с помощью электропривода 2, и испытательную платформу (ИП) 3, перемещаемую радиально вдоль НК с помощью электропривода 4 и передачи 5 «винт-гайка». На ИП установлен двухосевой акселерометр 6 (датчик перегрузок). Радиальное перемещение ИП может быть реализовано с применением иного типа кинематической передачи или с помощью реверсивного линейного электропривода.
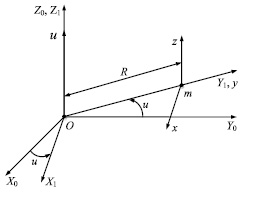
Рис. 1. Системы координат стенда
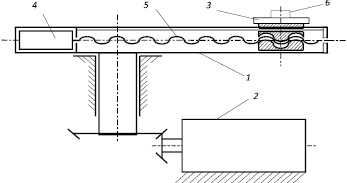
Рис. 2. Кинематическая схема ротационного стенда
Разумеется, в наземных условиях невозможно имитировать процессы ССР КА со сколь угодно произвольными начальными или конечными дистанциями между кораблями. Это означает, что необходимо установить критерии подобия имитационной модели (1) и натуры (2).
Метод теории подобия, применение которого здесь более чем оправдано, призван оптимизировать алгоритмы процессов ССР и распространить их на движение КА. Как известно, для любой динамической системы можно составить достаточно большое число критериев подобия, но, в любом случае, они должны отражать сущность тех или иных физических процессов [1].
Полагая, что геометрическое и временное подобие рассматриваются в процессах ССР как данность (это непременные атрибуты как минимум кинематического подобия [1, 3]), приведем эти уравнения к безразмерной форме.
Для этого сначала введем критерий-симплекс, устанавливающий геометрическое подобие процессов, отвечающих имитационной модели и натуре:
K1 = R/D. (3)
Введем число подобия, характеризующее размерность управляющих ускорений в международной системе единиц:
N1 = 1 м/с2. (4)
Заметим, что при K1 = const имеем:
 . (5)
. (5)
Помножим члены уравнения (1) на выражение (3) и разделим на выражение (4). С учетом соотношений (5) в результате получим критериальные уравнения процесса плоского движения безотносительно модели и натуры в виде:
 (6)
(6)
где  – безразмерные фазовые переменные (расстояние, скорость и ускорение) линейного движения двух объектов;
– безразмерные фазовые переменные (расстояние, скорость и ускорение) линейного движения двух объектов;  – безразмерные фазовые переменные (угловые скорость и ускорение) вращательного движения двух объектов вокруг оси начала координат полярной СК одного из объектов; aR0(t), au0(t) – безразмерные управляющие ускорения, действующие соответственно по нормали и по касательной к траектории плоского движения одного подвижного объекта по отношению к другому.
– безразмерные фазовые переменные (угловые скорость и ускорение) вращательного движения двух объектов вокруг оси начала координат полярной СК одного из объектов; aR0(t), au0(t) – безразмерные управляющие ускорения, действующие соответственно по нормали и по касательной к траектории плоского движения одного подвижного объекта по отношению к другому.
Критериальные уравнения (6) пригодны для описания любого плоского движения, в том числе и процесса ССР двух КА.
Заметим, что определяющие параметры  , входящие в левые части уравнений имитационной модели (2), имеют независимые размерности. Поскольку в соответствии с π – теоремой [1] число нетривиальных критериев подобия меньше числа определяющих физических параметров с различными размерностями на величину, равную числу определяющих параметров с независимыми размерностями, то вопрос об установлении иных критериев подобия теряет смысл.
, входящие в левые части уравнений имитационной модели (2), имеют независимые размерности. Поскольку в соответствии с π – теоремой [1] число нетривиальных критериев подобия меньше числа определяющих физических параметров с различными размерностями на величину, равную числу определяющих параметров с независимыми размерностями, то вопрос об установлении иных критериев подобия теряет смысл.
Для соблюдения подобия рассматриваемых динамических процессов требуется соблюсти также подобие начальных и граничных условий для всех сходственных точек (координат) натуры и модели. С учетом выражений (5), (6) на основе элементарных логических умозаключений несложно доказать, что при соблюдении геометрического подобия (3) никакие варианты введения иных, кроме единичных, коэффициентов подобия для угловых фазовых переменных (угла смещения ЛВ в плоскости орбиты относительно заданного направления, угловой скорости и углового ускорения ЛВ) не способны удовлетворить одновременно уравнениям (1) и (2), а следовательно, критериальному уравнению (6). Результаты моделирования процессов ССР в соответствии с уравнениями (6) в системе Matlab/Simulink полностью подтвердили адекватность рассматриваемых критериев подобия и критериальных уравнений.
Выводы
- Относительное движение КА в заключительной фазе сближения и стыковки, описываемое в визирной СК, может быть представлено имитационной моделью плоского движения материальной точки в абсолютной системе координат наземного двухстепенного испытательного стенда. При этом начало координат визирной СК, размещенной в точке визирования ПА, соответствует точке на оси вращения стенда, а центр масс АА – точке размещения акселерометров на радиально перемещаемой платформе стенда.
- Определяющим критерием подобия имитационного моделирования в наземных условиях является геометрический критерий, представляющий собой отношение текущих значений радиуса перемещения некоторой материальной точки вдоль несущей конструкции стенда, и дистанции между КА по линии визирования. Этот параметр в общем случае является нестационарным, т.е. по мере сближения двух КА его целесообразно увеличивать с целью снижения относительных погрешностей имитационного моделирования.
- Для соблюдения подобия имитационной модели и натуры необходимо соблюсти симплексный геометрический критерий подобия ко всем линейным фазовым переменным, входящим в критериальное уравнение (дистанции, линейной скорости и ускорению). Ко всем угловым координатам необходимо применять единичный индикатор подобия, т.е. угловые переменные (скорость вращения и угловое ускорение), связанные со стендом, должны быть равны угловым скорости и ускорению ЛВ КА.
Рецензенты:
Бочкарев С.В., д.т.н., доцент, профессор кафедры микропроцессорных средств автоматизации, Пермский национальный исследовательский политехнический университет, г. Пермь;
Цаплин А.И., д.т.н., профессор, зав. кафедрой общей физики, Пермский национальный исследовательский политехнический университет, г. Пермь.
Работа поступила в редакцию 11.04.2014.
Библиографическая ссылка
Казанцев В.П., Даденков Д.А. КРИТЕРИИ ПОДОБИЯ И КРИТЕРИАЛЬНЫЕ УРАВНЕНИЯ В ЗАДАЧАХ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ // Фундаментальные исследования. 2014. № 6-2. С. 246-250;URL: https://fundamental-research.ru/en/article/view?id=34143 (дата обращения: 10.07.2026).