


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
APPLICATION OF FUZZY LOGIC FOR INTELLECTUALIZATION LEARNING OF PARAMETRIC SYNTHESIS COMBINED CONTROL SYSTEMS

При автоматизации технологического объекта управления (ТОУ) возможны случаи, когда одноконтурные САУ не обеспечивают удовлетворительного качества регулирования ни при каких настройках регулятора. Одной из причин низкого качества регулирования является воздействие на ТОУ существенных возмущений. Если имеется возможность автоматического измерения наиболее «сильного» возмущающего воздействие на ТОУ, то применяется комбинированная САУ. Действие контролируемого возмущения компенсируется специальным устройством, компенсатором [7, 2], а с помощью регулятора, находящегося в контуре обратной связи, устраняется действие других (неконтролируемых) возмущений. Таким образом, регулирующее воздействие формируется на основании двух принципов регулирования: по отклонению регулируемой переменной от заданного значения и по возмущению. Компенсация возмущений осуществляется путём введения дополнительного управляющего воздействия либо на вход канала регулирования ТОУ, либо непосредственно на вход регулятора. Эти системы находят применение в различных отраслях промышленности: в пищевой и химической промышленности [7], в нефтехимии [3], в теплоэнергетике [1]. Основой расчёта комбинированных САУ является принцип инвариантности. Применительно к рассматриваемым системам в соответствии с этим принципом отклонение выходной координаты ТОУ под действием возмущения должно быть тождественно равно нулю [4].
С учётом востребованности и эффективности подобных систем управления на производстве существует необходимость обучения персонала для их сопровождения и обслуживания. При этом одной из наиболее важных задач обслуживания САУ является параметрический синтез (ПС).
Одними из наиболее востребованных средств обучения являются автоматизированные обучающие системы (АОС), организованные на базе информационных и коммуникационных технологий (ИКТ). При этом процесс анализа выполненных в АОС учебных заданий, как правило, возлагается на человека, что не всегда удобно в условиях ограниченных временных и человеческих ресурсов, так как процесс обучения тесно связан с субъективным мнением обучающего, он сложно поддаётся автоматизации, что усложняет его алгоритмизацию и внедрение в АОС. Для этого необходимо интеллектуализировать процесс анализа проведённых учебных заданий как наиболее зависимых от преподавателя.
Постановка задач
Предлагается интеллектуализировать определение уровня знаний ПС комбинированной САУ за счёт применения аппарата нечёткой логики как наиболее эффективного средства, позволяющего алгоритмизировать рассуждения обучаемого в условиях нечёткости и размытости их определения.
Для расчёта оптимальных значений настроечных параметров реальных компенсаторов комбинированной САУ известен [8] графо аналитический метод. Недостатком этого метода является сложность его реализации на ЭВМ. В связи с этим осложняется автоматизированное проектирование подобных систем регулирования, так как процесс машинной обработки прерывается. Для повышения эффективности ПС и возможности интеллектуализации контроля его проведения предлагается аналитический метод определения параметров компенсирующих устройств в виде реальных дифференцирующих[4], интегро-дифференцирующих [5] и неминимальнофазовых инерционных звеньев [6]. Данный метод позволит алгоритмизировать ПС и использовать его при интеллектуализации обучения ПС комбинированной САУ.
Интеллектуализация обучения ПС комбинированной САУ
ПС состоит из двух основных этапов: из расчёта настроечных параметров регулятора, аналогично ПС одноконтурной САУ [9], и расчёта настроечных параметров компенсирующего устройства.
Структурный и параметрический синтез компенсаторов включает в себя построение вектора АФХ идеального компенсатора, выбор реального компенсатора и определение его оптимальных настроечных параметров.
Процесс контроля проведения ПС комбинированной САУ начинается с выбора типа реального компенсатора. Результат выбора типового звена для реализации реального компенсатора оценивается ЛП «Тип компенсатора» по термам «Лучший», «Хороший», «Нормальный», «Плохой» (рис. 1).
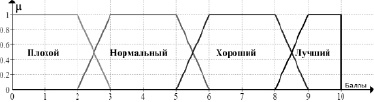
Рис. 1. Функции принадлежности лингвистической переменной «Тип компенсатора»
Термы ЛП «Тип компенсатора» описываются с помощью трапециевидной функции принадлежности. Выбор точки, соответствующей рабочей частоте на графике АХФ реального компенсатора, согласно экспертному опросу оценивается по ЛП «Расстояние до точки» (рис. 2).
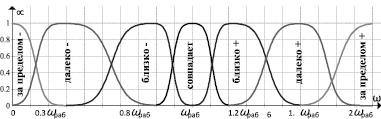
Рис. 2. Функции принадлежности ЛП «Расстояние до точки» для точки ωраб на графике АФХ реального компенсатора
На рис. 3 изображена схема контроля полученных обучаемым знаний при проведении ПС комбинированной САУ. На рисунке видно, что контроль усвоения расчета настроечных параметров регулятора проводится аналогично одноконтурной САУ [9], а его результат является входным параметром для БЗ по определению общего УЗ материала по ПС комбинированной САУ совместно с оценкой проведения расчета компенсатора.
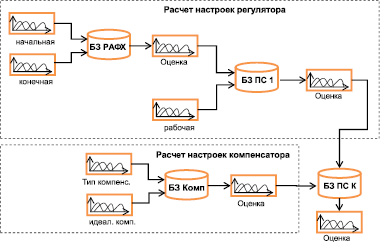
Рис. 3. Схема контроля обучения ПС комбинированной САУ
Общий критерий УЗ ПС комбинированной САУ определяется на основе данных критериев уровня знаний нахождения настроечных параметров компенсатора и регулятора. При этом критерий уровня знаний нахождения настроечных параметров компенсатора является определяющим при выборе общего критерия УЗ ПС.
Точка, расположенная на графике АФХ, характеризуется координатами в комплексной плоскости для конкретной частоты. В связи с этим нечёткое множество критериев правильности выбора частоты  является частью множества точек, принадлежащих графику АФХ. Также необходимо учитывать, что множество критериев выбранной частоты Ak должно принадлежать множеству координат реализации реального компенсатора K, которое зависит от типа используемого звена. Для реализации области реального компенсатора необходимо выполнение условий
является частью множества точек, принадлежащих графику АФХ. Также необходимо учитывать, что множество критериев выбранной частоты Ak должно принадлежать множеству координат реализации реального компенсатора K, которое зависит от типа используемого звена. Для реализации области реального компенсатора необходимо выполнение условий
в виде реального дифференцирующего звена:

в виде интегро-дифференцирующего звена:


в виде неминимальнофазового инерционного звена:

где Re – вещественная часть комплексной плоскости, Im – мнимая часть комплексной плоскости; k – коэффициент усиления реального компенсатора.
Исходя из вышеописанных правил реализуемости рассматриваемых типовых компенсаторов, сформированы значения термов ЛП «Тип компенсатора».
При правильном выборе точки на графике АФХ идеального компенсатора (совпадение выбранной точки с точкой на рабочей частоте ωраб, полученной на первом этапе ПС), возможна ситуация, при которой этот выбор даст нулевую оценку уровня знаний ПС комбинированной САУ из-за неправильного выбора типа компенсатора, так как в этом случае  .
.
Далее, используя заполненную экспертом БЗ, определяется критерий УЗ этапов проведения ПС комбинированной САУ по ЛП «Знания». Для определения уровня знаний настройки компенсатора используются правила нечётких продукций в формате (1), где А – ЛП «Тип компенсатора», В – ЛП «Расстояние до точки» для точки рабочей частоты на графике АФХ реального компенсатора, а C – ЛП «Знания» для определения уровня знаний настройки компенсатора.
ЕСЛИ A = ai И B = bi, ТО C = ci, (1)
где А, В, С – лингвистические переменные; ai, bi, ci – термы соответствующих лингвистических переменных.
Для определения уровня знаний ПС комбинированной САУ используются правила нечётких продукций в формате (1), где А и В – ЛП «Знания» для определения уровня знаний настройки компенсатора и регулятора, а C – ЛП «Знания» для определения общего уровня знаний проведения ПС комбинированной САУ.
Моделирование системы нечёткого вывода
Для создания и моделирования созданной системы нечёткого вывода использовались специализированная программа FuzzyTECH. Так как программа FuzzyTECH не поддерживает кириллические шрифты все элементы моделируемой системы нечёткого вывода (термы, лингвистические переменные, база знаний и их правила) обозначаются буквами латинского алфавита.
Входные данные системы нечёткого вывода для определения критерия уровня знаний ПС комбинированной САУ базируются на лингвистической переменной «Расстояние до точки», а также на лингвистической переменной «Тип компенсатора» с термами {«bеst» (Лучший), «good» (Хороший), «normal» (Нормальный), «badly» (Плохой)}.
Для создания данной модели в программе FuzzyTECH в качестве входных данных используются следующие лингвистические переменные:
- «W1_AFH» – расстояние до точки начальной частоты на графике РАХФ объекта управления;
- «W2_AFH» – расстояние до точки конечной частоты на графике РАХФ объекта управления;
- «dest_point_D_1» – расстояние до точки рабочей частоты на линии Д-разбиения;
- «conpens_type» – определение правильности выбора типа звена реального компенсатора;
- «dest_point_3» – расстояние до точки рабочей частоты на графике АФХ идеального компенсатора.
Выходные данные системы базируются на лингвистической переменной «Знания» и реализуются в ЛП «rating_ComboAS» для определения уровня знаний ПС комбинированной САУ. Также на этой лингвистической переменной базируются промежуточные ЛП:
- «rating_RAFH» – УЗ нахождения начальной и конечной частоты на графике РАФХ;
- «rating_OneLoopAS» – УЗ определения настроечных параметров регулятора;
- «rating_ComboAS» – УЗ определения настроечных параметров компенсатора;
- «rating_Work3» – УЗ ПС комбинированной САУ.
Рассматриваемая нечёткая модель содержит 4 блока правил нечётких продукций для определения итогового уровня знаний проведения ПС комбинированной САУ.
Первые два блока правил «RAFH_Rule» и «OneLoopAS_Rule» используются для определения УЗ по нахождению настроечных параметров регулятора аналогично описанным в [9] блокам определения УЗ одноконтурной САУ.
Третий блок правил «ComboAS_Rule» используется для определения УЗ по нахождению настроечных параметров компенсатора. Входными ЛП этого блока являются переменные «dest_point_D_1» и «conpens_type», а выходной ЛП «rating_ComboAS».
Четвёртый заключительный блок правил «rating_Work3» суммирует полученные результаты УЗ нахождения настроечных параметров регулятора и компенсатора на основе переменных «rating_OneLoopAS» и «rating_ComboAS». Полученный результат помещается в переменную «rating_Work3».
Для анализа рассматриваемой системы построена поверхность нечёткого вывода (рис. 4, а) в плоскости выбора рабочей частоты на графике АФХ и выбора типа звена реального компенсатора. По поверхности нечёткого вывода устанавливается уровень знаний нахождения настроечных параметров компенсатора.
Поверхность нечёткого вывода на графике (рис. 4, б) позволяет установить зависимость уровня знаний ПС комбинированной САУ от уровня знаний настройки регулятора и от уровня знаний настройки компенсатора.
а 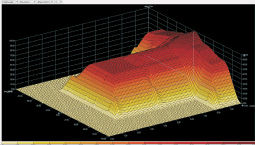 б
б 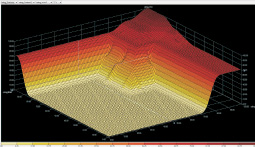
Рис. 4. Зависимость уровня знаний: а – нахождения настроек компенсатора от выбора рабочей частоты на графике АФХ и от типа звена реального компенсатора; б – ПС комбинированной САУ от уровня знаний настройки регулятора и реального компенсатора
Выводы
Описанные выше методы определения уровня знаний параметрического синтеза комбинированных САУ позволят повысить качество самостоятельной работы обучаемых и значительно сократят время на контроль выполнения лабораторных работ по ПС. Использование описанных способов интеллектуализации обучения ПС САУ ТП при создании лабораторного практикума, входящего в состав обучающей системы, дополнит существующие подходы при автоматизации учебного процесса. В частности, данный подход даёт возможность включать практические задания в системы тестирования, а также в адаптивные и экспертные обучающие системы.
Отсутствие разрывов на поверхности нечёткого вывода (рис. 4) свидетельствует об устойчивости созданных нечётких моделей, что вместе с её адекватностью свидетельствует о возможности её применения на практике для определения уровня знаний обучаемых параметрическому синтезу комбинированных систем автоматического управления технологическими процессами.
Проведённое моделирование системы нечёткого вывода показало, что:
- предложенные правила нечёткой базы знаний обучающей системы адекватно реагируют на все действия обучаемого, необходимые для проведения ПС САУ;
- экспертная система корректно обрабатывает исходные данные, подаваемые в блок логического вывода;
- полученные на выходе критерии УЗ всех промежуточных и конечных этапов проведения ПС САУ соответствуют ожиданиям экспертов.
Модель системы нечёткого вывода, созданная при помощи программы FuzzyTECH, показала, что её можно использовать для создания экспертной обучающей системы. Это даст возможность выдавать оценку УЗ обучаемого и рекомендации по их повышению в ответ на любые его действия при выполнении всех этапов ПС.
Рецензенты:
Игнатюк В.А., д.ф-м.н., профессор Владивостокского государственного университета экономики и сервиса, г. Владивосток,
Дыда А.А., д.т.н., профессор Морского государственного университета им. адм. Г.И. Невельского, г. Владивосток.
Работа поступила в редакцию 11.02.2014.
Библиографическая ссылка
Сачко М.А., Кривошеев В.П. ПРИМЕНЕНИЕ НЕЧЁТКОЙ ЛОГИКИ ДЛЯ ИНТЕЛЛЕКТУАЛИЗАЦИИ ОБУЧЕНИЯ ПАРАМЕТРИЧЕСКОГО СИНТЕЗА КОМБИНИРОВАННОЙ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ // Фундаментальные исследования. 2014. № 3-3. С. 484-489;URL: https://fundamental-research.ru/en/article/view?id=33700 (дата обращения: 17.07.2026).