


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
MODULAR ORGANIZATION FOR SENSOR AND CONTROL SYSTEM OF INTELLEGENT MOBILE PLATFORM

Классификация мобильных колесных роботов по их конструктивному исполнению, а также аппаратно-техническому обеспечению крайне широка [1–3]. Обилие вариантов реализации платформ обуславливается широким спектром применения: перевозка грузов, исследование или обработка/очистка территории, экологический мониторинг, измерения параметров протяженных объектов, тушение пожаров, поиск пострадавших в завалах, исследование труднодоступных мест и др.
На практике колесные роботизированные платформы ориентированы на решение конкретной задачи, что в целом затрудняет их применимость в смежных приложениях. Часто небольшое изменение условий эксплуатации робота или постановка новой задачи приводят к необходимости существенного изменения аппаратно-технического обеспечения. Перспективным направлением обеспечения эффективного наращивания функций в рамках единой структуры мобильного колесного робота представляется модульная организация систем измерений и управления. Модульная структура аппаратно-технического обеспечения расширяет диапазон функциональных возможностей и создает предпосылки для автоматического выбора конфигураций робота.
Модульный принцип построения сенсорной и управляющей систем мобильной платформы
Основные задачи разрабатываемой платформы, такие как обеспечение возможности анализа сцен окружающего мира и возможности избегания опасных режимов функционирования, определение параметров наблюдаемых объектов, решаются с использованием сенсорной системы [3]. Выделим базовые сенсоры, используемые для решения сформулированных задач (табл. 1).
На рис. 1 выделено бортовое и дистанционное управление мобильным роботом. Уровень дистанционного управления представлен автоматизированным рабочим местом (АРМ), с которого поступают основные команды управления на интеллектуальную систему управления (ИСУ) мобильного робота, систему управления исполнительными механизмами (СУИМ) и систему управления сенсорами (СУС).
Таблица 1
Базовый набор сенсорной подсистемы
|
Задача |
Подзадачи |
Сенсоры |
|
Обеспечение возможности анализа сцен окружающего мира: |
Анализ сцен окружающего мира |
Бортовая видеокамера |
|
Определения параметров наблюдаемых объектов: |
Положение объекта в дальней зоне |
Лазерный дальномер |
|
Положение объекта в ближней зоне |
Сонар |
|
|
Расстояние до объекта |
Лазерный дальномер, сонар |
|
|
Скорость и направление движения объекта |
||
|
Цвет объекта |
Датчик цвета |
|
|
Температура объекта |
Пирометр |
|
|
Обеспечение возможности избегания опасных режимов функционирования: |
Наезд на препятствие |
Тактильный датчик |
|
Низкий заряд батареи |
Датчик разряда батареи |
|
|
Неисправность исполнительных механизмов |
Энкодер Датчик давления в шинах |
|
|
Продолжительная работа в предельных режимах |
Датчик тока |
|
|
Обнаружение непроходимой среды: |
Водная преграда, болотистая местность |
Датчик влаги |
|
Яма, обрыв |
ИК-датчик |
|
|
Обнаружение агрессивных факторов внешней среды: |
Высокая или низкая температура |
Датчик температуры |
|
Химически активная среда |
Биосенсор |
|
|
Ориентация: |
Отслеживание положения исполнительных механизмов |
Энкодер |
|
Определение наклона плоскости движения (без наклона, подъем, спуск) |
Акселерометр |
|
|
Определение сторон света |
Компас |
|
|
Определение факторов внешней среды: |
Время суток (день, ночь, сумерки) |
Датчик света |
|
Погодные условия (дождь, туман, снег) |
Датчик дождя, тумана, снега |
|
|
Оценка других факторов: |
Дым, пыль |
Датчик дыма (пыли) |
|
Шум |
Микрофон |
К ИСУ от АРМ подаются команды высокого уровня с указанием направления движения или целевого объекта, для СУИМ – например, команды ограничения скорости, а для СУС – команды на отключение или включение сенсоров. В ИСУ заложены алгоритмы поведения мобильного робота, например, алгоритм объезда препятствий, алгоритм «инстинкта самосохранения», самодиагностика и др.
С учетом особенностей задач и данных табл. 1 построим модульную структуру сенсорной системы [4] и покажем ее связь с системой управления [5] (см. рис 1).
Сенсоры разделены на две категории: группа независимых сенсоров НС (показания не зависят или не должны зависеть от факторов окружающей среды) и группа зависимых сенсоров ЗС (показания зависят от факторов окружающей среды).
Данные поступают с ЗС на ИСУ в основном для выполнения задач по определению параметров наблюдаемых объектов. Каждый сенсор относится к определенной категории влияющих факторов внешней среды (ФВС): зависимые от времени суток (ЗВС), зависимые от погодных условий (ЗПУ), зависимые от дыма, пыли (ЗДП) или зависимые от шума (ЗШ). У каждого сенсора есть ключ, управляемый СУС, разрешающий (ключ замкнут) или запрещающий (ключ разомкнут) работу сенсора.
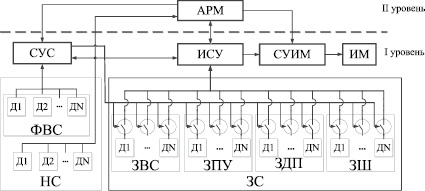
Рис. 1. Модульная структура сенсорной подсистемы мобильной платформы
Информация с НС передается на СУС, ИСУ и АРМ. В СУС поступает информация с НС, которые определяют ФВС. Исходя из этих данных, СУС осуществляет управление включением-выключением сенсоров. СУС может получать данные и с других НС, например, с датчика разряда батареи для своевременного отключения энергоемких сенсоров, с датчика температуры, для отключения сенсоров, которые при данной температуре отображают недостоверную информацию.
В ИСУ поступает информация с НС, необходимая для ориентации в пространстве (компас, акселерометр, энкодер и т.д.) и для определения работоспособности робота (датчик разряда батареи, энкодер, датчик температуры). В АРМ поступает информация с НС, зависящая от конкретных целей, обычно, с небольшого числа сенсоров, обусловленного большим расстоянием между мобильным роботом и диспетчерским пунктом управления.
Формирование состава сенсорной и управляющей систем мобильной платформы
На основе опыта проектирования мобильных приложений [6] и с учетом приведенной схемы построим обобщенную структурную схему мобильной интеллектуальной платформы (рис. 2), содержащую Д – датчик; БН – блок независимых датчиков; БЗ – блок зависимых датчиков; БД – блок двигателя; ДР – драйвер двигателя; Двиг – двигатель; ДТ – датчик тока; ЭН – энкодер.
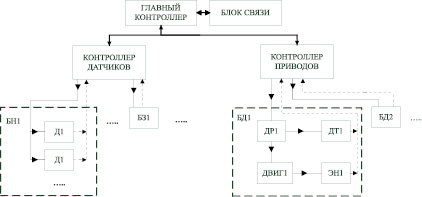
Рис. 2. Обобщенная структурная схема мобильной платформы
Формирование состава сенсорной и управляющей систем будем осуществлять по последовательному алгоритму с учетом блоков обобщенной схемы. Схема формирования состава представлена на рис. 3.

Рис. 3. Схема формирования состава сенсорной и управляющей систем
Элементы мобильной платформы будем выбирать согласно характеристикам, выбранным по критериям табл. 2 [7].
Заключение
Предложенный подход к модульной организации представляет собой концепцию наращиваемой структуры аппаратно-технического обеспечения измерений и управления мобильной интеллектуальной платформы и последовательный алгоритм выбора ее элементов.
На основании исходных данных объекта роботизации формируются входные критерии, которые поступают на вход блоков выбора элементов систем. На выходе блоков формируются параметры, которые в свою очередь определяют элемент системы измерений и управления и так же поступают на входы других блоков схемы. Полный набор элементов платформы производится путем последовательного выбора выходных параметров в соответствии с набором частных критериев.
Таблица 2
Обозначение частных критериев для выбора элементов модульной структуры мобильной платформы
|
Обозначение |
Характеристика |
|
Скорость перемещения – К1 |
|
|
СК1 |
< 1 м/с |
|
СК2 |
1–5 м/с |
|
СК3 |
> 5 м/с |
|
Грузоподъемность – К2 |
|
|
ГР1 |
Свой вес |
|
ГР2 |
< 25 % |
|
ГР3 |
25–50 % |
|
ГР4 |
50–100 % |
|
ГР5 |
> 100 % |
|
Проходимость – К3 |
|
|
ПР1 |
Низкая (сухой грунт, асфальт) |
|
ПР2 |
Средняя (пересеченная местность) |
|
ПР3 |
Полная с возможностью преодоления водных препятствий |
|
Управляемость – К4 |
|
|
УП1 |
Ручное |
|
УП2 |
Полуавтоматическое |
|
УП3 |
Автоматическое |
|
Автономность – К5 |
|
|
АВ1 |
< 1 ч |
|
АВ2 |
1–3 ч |
|
АВ3 |
3–10 ч |
|
АВ4 |
10–24 ч |
|
АВ5 |
> 24 ч |
|
Простота конструкции – К6 |
|
|
ПК1 |
Универсальная, расширяемая |
|
ПК2 |
Уникальная + универсальная, расширяемая |
|
ПК3 |
Уникальная |
|
Габариты – К7 |
|
|
ГБ1 |
< 0,1 м3 |
|
ГБ2 |
0,1–0,5 м3 |
|
ГБ3 |
0,5 – 1 м3 |
|
ГБ4 |
> 1м3 |
|
Маневренность – К8 |
|
|
МН1 |
Прямое движение |
|
МН2 |
Поворот, разворот с радиусом R |
|
МН3 |
Разворот на месте |
|
Защита от внешних факторов – К9 |
|
|
УС1 |
Не предусмотрено |
|
УС2 |
Туман |
|
УС3 |
Дождь |
|
УС4 |
Снег |
|
УС5 |
Ветер |
|
УС6 |
Пыль |
|
УС7 |
Шум |
|
УС8 |
Дым |
|
УС9 |
Удар |
|
УС10 |
Изменение нагрузки |
|
УС11 |
Сбой подсистем |
|
УС12 |
Электромагнитное и радиационное излучение |
|
Дополнительные критерии |
|
|
Шумность – К10 |
|
|
ШМ1 |
< 20 Дб |
|
ШМ2 |
20–40 Дб |
|
ШМ3 |
40–60 Дб |
|
ШМ4 |
> 60Дб |
|
Исполнение – К11 |
|
|
IP XX |
Индекс защиты IP |
|
КИ Х |
Климатическое исполнение |
|
КР Х |
Категория размещения изделий |
|
Точность движений – К12 |
|
|
ТД1 |
< 0,5 % |
|
ТД2 |
0,5–1 % |
|
ТД3 |
1–5 % |
|
ТД4 |
> 5 % |
|
Анализ сцен окружающего мира – К13 |
|
|
АС1 |
Без возможности анализа |
|
АС2 |
Отображение состояния |
|
АС3 |
Распознавание 2D-объектов |
|
АС4 |
Распознавание 3D-объектов |
|
Отслеживаемые параметры – К14 |
|
|
ОП1 |
Расстояние до объекта |
|
ОП2 |
Цвет |
|
ОП3 |
Освещенность |
|
ОП4 |
Положение в пространстве |
|
ОП5 |
Присутствие газа |
|
ОП6 |
Шум/звук |
|
ОП7 |
Дым/пыль/туман/дождь/снег |
|
ОП8 |
Влажность |
|
ОП9 |
Температура |
|
ОП10 |
Давление |
|
Избегание опасных режимов функционирования – К15 |
|
|
ИО1 |
Избегание внешних опасных ситуаций |
|
ИО2 |
Избегание внутренних опасных режимов работы |
|
Дальность связи – К16 |
|
|
ДС1 |
< 1 м |
|
ДС2 |
1–10 м |
|
ДС3 |
10–1000 м |
|
ДС4 |
> 1000 м |
|
Скорость передачи данных – К17 |
|
|
СС1 |
< 128 кб/с |
|
СС2 |
128–1024 кб/с |
|
СС3 |
> 1024 кб/с |
Рецензенты:
Кавалеров Б.В., д.т.н., доцент, заведующий кафедрой электротехники и электромеханики, ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь;
Казанцев В.П., д.т.н., профессор кафедры микропроцессорных средств автоматизации, ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь.
Работа поступила в редакцию 30.10.2013.
Библиографическая ссылка
Кычкин А.В., Артемов С.А., Власов В.А. МОДУЛЬНАЯ ОРГАНИЗАЦИЯ СЕНСОРНОЙ И УПРАВЛЯЮЩЕЙ СИСТЕМ МОБИЛЬНОЙ ИНТЕЛЛЕКТУАЛЬНОЙ ПЛАТФОРМЫ // Фундаментальные исследования. 2013. № 10-10. С. 2147-2152;URL: https://fundamental-research.ru/en/article/view?id=32725 (дата обращения: 02.07.2026).