


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
IMPROVING THE DESIGN OF GAS-MAGNETIC SUPPORTS HIGH SPEED ROTARY MACHINES

Развитие машиностроительной отрасли выдвигает новые требования к скорости вращения ротора газотурбинных установок, электрических машин, шпиндельных узлов станков и т.д. Рост скорости вращения и мощности роторных машин при одновременной тенденции к уменьшению массогабаритных показателей ставит проблему повышения долговечности подшипниковых узлов как первоочередную. В металлообработке помимо задачи повышения долговечности подшипникового узла стоит проблема повышения качества и точности обработки, что особенно актуально для высокоскоростной обработки.
Оценка влияния различных факторов показывает, что на 80 % точность обработки определяет шпиндельный узел [3]. Повышение точности обработки может идти как по пути совершенствования известных конструкций подшипниковых опор, так и основываться на разработке новых конструкций комбинированных опор, сочетающих преимущества разных подшипников и нивелирующих их недостатки. Так, в Комсомольском-на-Амуре государственном техническом университете была предложена конструкция высокоскоростной комбинированной газомагнитной опоры (ГМО), которая показала хорошие результаты по повышению точности вращения шпинделя (рис. 1).
Работа представленной на рис. 1 ГМО описана в работах [4–7]. Через обмотку электромагнита пропускали постоянный ток определенной величины. Найдено положение оси вала, не совпадающее с осью опоры, при котором достигается максимальная точность вращения шпинделя. Кроме того, несущая способность данной конструкции выше, чем у чисто газового подшипника за счет суммарного действия газовых и магнитных сил [9, 10].
Кроме очевидных достоинств, эта опора обладает и определенными недостатками. Так, асимметричное положение электромагнита позволяет компенсировать только механические силы, направленные вертикально вниз. Наличие всего одного электромагнита не дает возможность стабилизировать положение вала даже в случае управления магнитной силой за счет изменения тока намагничивающей катушки. Стабилизацию положения вала осуществляет только газовый подшипник, который является самоустанавливающимся. Еще один недостаток связан с направлением магнитного потока поперек оси вала. При вращении вала в этом случае возникают токи Фуко, приводящие к появлению заметного магнитного трения, нагреву и торможению ротора.
С целью устранения выявленных недостатков были предложены новые технические решения, направленные на улучшение конструкции и характеристик ГМО. В частности, с помощью программы T-FLEX CAD разработана конструкция управляемой ГМО (рис. 2).
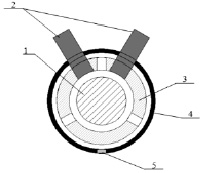
Рис. 1. Поперечное сечение ГМО: 1 – вал; 2 – полюсы электромагнита; 3 – вкладыш газостатического подшипника; 4 – герметичный корпус для создания давления газа; 5 – отверстие для наддува газа
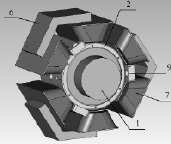
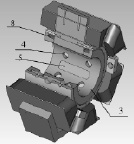
Рис. 2. ГМО с поперечным расположением магнитопроводов: 1 – ферромагнитный вал; 2 – рубашка и 3 – вкладыш газостатического подшипника; 4 – отверстия для пористых вставок; 5 – полюсы и 6 – ярмо элекромагнита; 7 – катушка; 8 – газовый канал; 9 – крепления датчиков перемещения
Конструкция опоры имеет поперечное относительно вала расположение трех магнитопроводов, шесть полюсов которых раздвинуты на 60 градусов по отношению друг к другу. Соосно с каждым электромагнитом устанавливается вихретоковый датчик перемещения вала. Использование обратных связей по перемещению вала и трехканального ПИД регулятора для управления электромагнитами позволяет магнитными силами компенсировать механические усилия на шпиндель, прикладываемые в произвольном радиальном направлении. Следовательно, увеличивается жесткость опоры и точность вращения шпинделя. В свою очередь газовый слой помимо вклада в общую несущую способность ГМО является страховкой от аварийной ситуации в случае потери управляемости магнитной частью опоры.
Недостатком ГМО с поперечным расположением магнитопроводов является возникновение магнитного торможения, вызванного токами Фуко. Для подавления токов Фуко требуется увеличивать электрическое сопротивление участка вала, находящегося под опорой, сохраняя его магнитные свойства. Например, на вал может быть насажена цапфа, шихтованная из ферромагнитных пластин, или непроводящая ток ферритовая втулка [1]. При этом для высокоскоростных роторных систем необходимо учитывать механическую прочность таких насадок. Также для изготовления валов могут использоваться сплавы, обладающие высоким удельным сопротивлением.
Для ГМО с поперечным расположением магнитопроводов было выполнено 2D-моделирование магнитного поля в среде Ansoft Maxwell. Полученное распределение силовых линий представлено на рис. 3. Приведен случай, когда включены все магниты одновременно, токи в обмотках равны и магнитные потоки направлены одинаково.
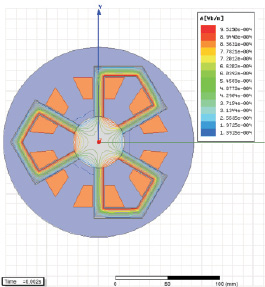
Рис. 3. Распределение силовых линий магнитного поля в ГМО с поперечным расположением магнитопроводов
Соседство разноименных магнитных полюсов смежных электромагнитов приводит к тому, что магнитные потоки замыкаются не только по «своему» магнитопроводу, но и частично ответвляются в цепь соседних магнитопроводов, что в некоторой степени уменьшает эффективность действия магнитных сил.
В случае, когда ротор должен быть цельнометаллическим и нет возможности шихтовки и насадки на вал ферритовых втулок, для уменьшения магнитного торможения предлагается источники магнитного поля располагать таким образом, чтобы в плоскости, перпендикулярной оси вращения ротора, находились одноименные полюса [8]. Силовые линии магнитного поля в этом случае лежат в плоскостях, проходящих через ось вращения вала. С помощью программы T-FLEX CAD разработана конструкция осесимметричной управляемой ГМО с продольным расположением магнитопроводов (рис. 4).
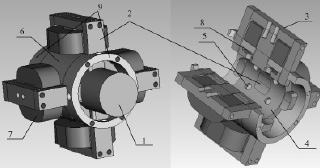
Рис. 4. ГМО с продольным расположением магнитопроводов: 1 – вал; 2 – полюсы и 3 – ярмо элекромагнита; 4 – вкладыш и 6 – рубашка газостатического подшипника; 5 – отверстия для пористых вставок; 7 – катушка; 8 – газовый канал; 9 – продолжение рубашки для фиксации полюсов и крепления датчиков перемещения
Данная конструкция имеет четыре магнитопровода, расположенных вдоль вала, полюсы которых раздвинуты на 90 градусов по отношению друг к другу. Предложено использовать Ш-образные магнитопроводы, которые хорошо вписываются в конструкцию газового подшипника. Кроме того, катушка электромагнита оптимальным образом заполняет окна магнитопровода, а суммарная площадь трех полюсов обеспечивает повышенную силу притяжения магнита. Задавая одинаковое направление токов в катушках, можно добиться параллельного прохождения магнитных потоков вдоль вала и снижения потерь на вихревые токи, а также существенного уменьшения магнитного торможения.
В случае использования четырех электромагнитов достаточно иметь два ортогонально расположенных датчика перемещения и два канала ПИД регулирования. Токи в противоположно расположенных электромагнитах должны дополнять друг друга: если в первом ток увеличивается, то во втором – уменьшается.
Для ГМО с продольным расположением магнитопроводов было выполнено 2D-моделирование магнитного поля в среде Ansoft Maxwell. Выбрано сечение ГМО вдоль оси вала. Полученное распределение силовых линий представлено на рис. 5. Приведен случай, когда включены магниты, расположенные на противоположных сторонах опоры, токи в обмотках равны и магнитные потоки направлены одинаково.
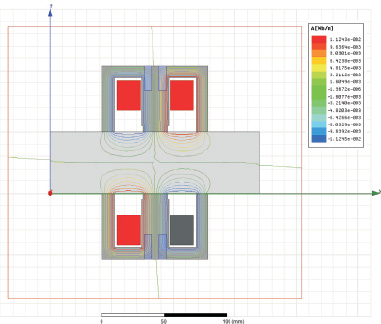
Рис. 5. Распределение силовых линий магнитного поля в ГМО с продольным расположением магнитопроводов
Выявленная картина силовых линий показывает, что магниты не завязаны между собой по магнитным потокам.
Особенностью газомагнитных опор является малая толщина рабочего зазора, которая не превышает 100 мкм. В связи с этим предъявляются жесткие требования к точности изготовления вкладыша и обработке вала. Тем не менее толщина зазора может оказаться не постоянной по окружности вала, что может влиять на работу регулятора. Для устранения влияния неидеальности окружности вала на измерение зазора предложено производить обработку значений датчиков перемещения [2].
Итак, предложенные конструкции ГМО позволяют улучшить силовые характеристики шпиндельного узла за счет дополнения ограниченной несущей способности газового подшипника силовым действием магнитного подшипника. Жесткость газового подшипника, обусловленную самоустанавливающимся принципом его действия, можно существенно повысить с помощью активного регулирования магнитным полем.
Рецензенты:
Иванов С.Н., д.т.н., профессор кафедры «Электромеханика», ФГБОУ ВПО «Комсомольский-на-Амуре государственный технический университет», г. Комсомольск-на-Амуре;
Башков О.В., д.т.н., доцент, директор Центра коллективного доступа ФГБОУ ВПО «Комсомольский-на-Амуре государственный технический университет», г. Комсомольск-на-Амуре.
Работа поступила в редакцию 01.08.2013.
Библиографическая ссылка
Копытов С.М., Космынин А.В., Ульянов А.В., Щетинин В.С., Хвостиков А.С. СОВЕРШЕНСТВОВАНИЕ КОНСТРУКЦИЙ ГАЗОМАГНИТНЫХ ОПОР ВЫСОКОСКОРОСТНЫХ РОТОРНЫХ МАШИН // Фундаментальные исследования. 2013. № 10-1. С. 25-29;URL: https://fundamental-research.ru/en/article/view?id=32208 (дата обращения: 04.07.2026).