


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
OPTIMIZATION OF ENERGY COSTS MARTIAL MECHANISM OF THE SHUTTLE WEAVING MACHINE FOR PRODUCTION OF FABRICS OF SPECIAL PURPOSE

На сегодняшний момент в текстильной отрасли особое внимание уделяется ткацким станкам, способным удовлетворять потребности современной промышленности в тканях технического и специального назначения. Рассмотрим общую схему конструкции боевого механизма ткацкого станка для выработки технических многослойных тканей, состоящих из угля и стекловолокон (рис. 1). Механизм работает следующим образом: ведущий шкив 1, расположенный на электродвигателе, посредством ременной передачи приводит в движение промежуточный шкив 2, который соединен ременной передачей 4 с натяжным шкивом 3. Погонялка 5 кинематически связана с ременной передачей 4, что при работе механизма обеспечивает ее перемещение. В свою очередь погонялка 5 разгоняет челнок 6 и обеспечивает его прокидку на другую сторону станка.
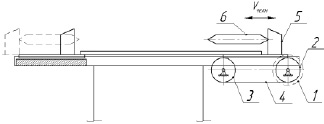
Рис. 1. Общая схема конструкции боевого механизма станка для выработки технических тканей
Цикловая диаграмма движения челнока представлена на рис. 2, в которой процесс движения челнока состоит из следующих фаз: разгон – полет – торможение – выстой.
αразг + αпол + αторм + αвыст = 180°.
Рассмотрим уравнение свободного полета челнока:
ΔE = ΔA, (1)
отсюда
 (2)
(2)
где m – масса челнока; Vн – начальная скорость полета челнока; Vк – конечная скорость полета челнока; g – ускорение свободного падения; f – коэффициент трения челнока по склизу батана; Lп – длина свободного полета челнока.
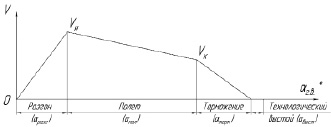
Рис. 2. Цикловая диаграмма движения челнока
С другой стороны:
 (3)
(3)
 (4)
(4)
где tп – время свободного полета челнока.
Объединяя выражения (2) и (4), получим:
 и
и  (5)
(5)

где L – длина челнока; hm – ширина заправки станка; Lр – длина разгона челнока; a – расстояние от «носика» челнока в момент отрыва от погонялки до входа в зев; b – положение «носика» челнока в момент начала торможения челнока.

где n – частота вращения главного вала станка.
Уравнение движения челнока в режиме разгона имеет вид:
 (6)
(6)
где Pдв – движущая сила;
mпр = m + m1,
где m1 – приведенная масса системы привода.
Предположим, что время контакта погонялки с челноком минимально, т.е. движущая сила, действующая на челнок в этот промежуток времени, изменяется незначительно, поэтому принимаем ее постоянной величиной Pдв = const.
Тогда из уравнения (6) имеем:
 (7)
(7)
Максимальная мощность, потребляемая на прокладывание челнока, равна N = PдвVн.
По цикловой диаграмме (рис. 2) на фазу боя челнока отводится αразг угла поворота главного вала, что при его частоте вращения главного вала n составляет:

Для обеспечения полета челнока через зев необходимо придать ему начальную скорость Vн, для чего требуется иметь угловую скорость ремня, охватывающего промежуточный и натяжной шкивы (поз. 2 и 3, рис. 1), определяемую из выражения:
 (8)
(8)
где R2 – радиус промежуточного шкива (поз. 2 рис. 1).
Угловая скорость ведущего шкива (поз. 1, рис. 1) равна

где R1 – радиус ведущего шкива (поз. 1, рис. 1).
Принимая в первом приближении линейный закон изменения угловой скорости ротора двигателя в процессе разбега, найдем величину углового ускорения ротора:
 (9)
(9)
Приведенный к оси ротора момент инерции звеньев механизма боя челнока определим из условия равенства кинетических энергий действительной и упрощенной систем:
 (10)
(10)
где Jпр – момент инерции массы ротора сервопривода; J1 – момент инерции массы ведущего шкива (поз. 1, рис. 1); J2 – момент инерции массы промежуточного шкива (поз. 2, рис. 1); J3 – момент инерции массы натяжного шкива (поз. 3, рис. 1);
Учитывая, что V = ω2R2, определим:
 (11)
(11)
Зная приведенный момент инерции масс механизма, определим величину приведенного к оси двигателя крутящего момента:
 (12)
(12)
Отсюда максимальная потребляемая механизмом мощность за цикл равна
N = Mпрω.
Для ткацкого станка с заправочной шириной 160 см (на 10 тыс. нитей основы в заправке) разработана программа для определения требуемой мощности на прокидку челнока, а также его скорости в зависимости от частоты вращения главного вала (αразг = 40°, αвыст = 5°, αторм = 25°). При расчетах частота вращения главного вала варьировалась в диапазоне 50…100 об./мин.
На рис. 3 изображен график зависимости скорости полета челнока от частоты вращения главного вала, из которого видно, что при увеличении частоты вращения главного вала в диапазоне 50…100 об./мин для согласованной работы механизмов станка требуется увеличивать скорость прокидки челнока в диапазоне 5…9,5 м/с.
На рис. 4 изображен график зависимости требуемой мощности на прокидку челнока от частоты вращения главного вала станка при массах челнока равных: 0,5; 0,6; 0,66 кг. В связи с тем, что меньшая масса челнока обеспечивает наиболее стабильную работы боевого механизма, а также требуется меньшая мощность для работы механизма (0,05…0,1 кВт), на практике принят челнок с массой 0,5 кг, что с точки зрения экономических показателей дает положительный результат при выборе привода боевого механизма.

Рис. 3. График изменения скорости полета челнока в зависимости от частоты вращения главного вала ткацкого станка
Выводы
1. Разработана методика аналитического расчета кинематических параметров боевого механизма прокладывания утка челночного ткацкого станка для выработки тканей специального назначения.
2. Составлена программа кинематического расчета боевого механизма, с помощью которой за счет варьирования массовых характеристик челнока обеспечена согласованная работа механизмов прибоя и прокладывания утка ткацкого станка.
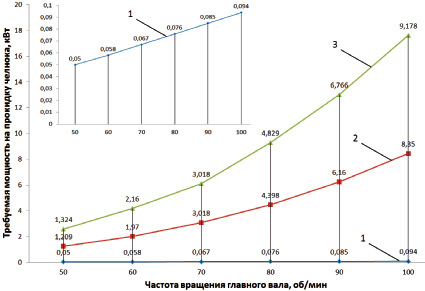
Рис. 4. График изменения требуемой мощности на прокидку челнока в зависимости от частоты вращения главного вала ткацкого станка1 – масса челнока 0,5 кг; 2 – масса челнока 0,6 кг; 3 – масса челнока 0,66 кг
3. Для данной конструкции боевого механизма ткацкого станка с рабочей шириной заправки 160 см на основании проведенных исследований рекомендуется применять челнок массой, равной 0,5 кг, для которого показатель требуемой мощности на прокладывание челнока минимален и варьируется в зависимости от частоты вращения главного вала в пределах 0,05…0,1 кВт.
Рецензенты:
Блиничев В.Н., д.т.н., профессор, зав. кафедрой «Машины и аппараты химического производства», ИГХТУ, г. Иваново;
Краснов А.А., д.т.н., профессор кафедры «Строительная механика», ИВГПУ, г. Иваново.
Работа поступила в редакцию 11.07.2013.
Библиографическая ссылка
Гречин В.А., Тувин А.А., Гущин А.В. ОПТИМИЗАЦИЯ ЗАТРАТ ЭНЕРГИИ БОЕВЫМ МЕХАНИЗМОМ ЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА ДЛЯ ВЫРАБОТКИ ТКАНЕЙ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ // Фундаментальные исследования. 2013. № 8-4. С. 818-821;URL: https://fundamental-research.ru/en/article/view?id=32002 (дата обращения: 16.06.2026).