


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
INFLUENCE OF EVOLUTION AIRCRAFT TO FORCES ACTING IN GTE

Характерной особенностью авиационного газотурбинного двигателя является наличие массивного быстровращающегося ротора. Это обстоятельство выступает причиной возникновения дополнительных внешних нагрузок на двигатель, в частности, гироскопического момента, возникающего при эволюциях летательного аппарата (рис. 1) [2].
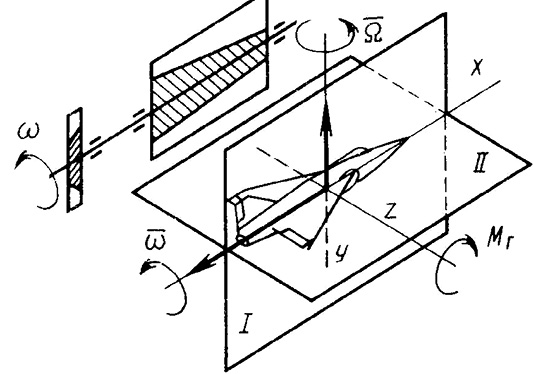
Рис. 1. Схема направлений действия гироскопического момента для одного из видов эволюции. Кроме того, на ГТД действуют инерционные нагрузки и сила тяжести самолета [2]: w – угловая скорость ротора ГТД; W – угловая скорость эволюции летательного аппарата; Мг – гироскопический момент
Ориентация ротора ГТД в соответствии с направлением векторов внешних сил позволяет изменить величину суммарного вектора внешних сил и уменьшить нагрузку на двигатель. Для решения поставленной задачи разработана модель поступательного движения вращающегося тела.
1. Обоснование модели
Задача решается на примере совместного поступательного и вращательного движения тела – шара.
Допущения.
1. Используется принцип суперпозиции.
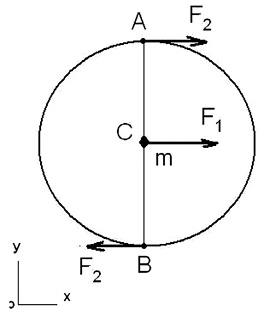
2. Рассматривается движение центра масс тела по окружности в инерциальной системе координат XOY с центром в точке О (рис. 2).
3. Решается первая задача механики: при заданной траектории движения найти действующие силы. К телу приложены постоянные по величине внешняя сила F1 в центре масс точке С, направленная по касательной к окружности, и момент пары сил (F2, F2’) (рис. 2, а) В результате чего тело движется плоскопараллельно, а центр масс (точка С) – равномерно по окружности. Такое движение описывается системой дифференциальных уравнений [6]
m ас x = SFi,x, (1)
m ас y = SFi,y, (2)
Ic∙e = SMc, (3)
где m – масса тела; а = dV/dt – ускорение центра масс поступательного движения; Ic – момент инерции центра масс; Fi – внешние силы; e – угловое ускорение; Mc – момент сил относительно центра масс.
 б)
б) 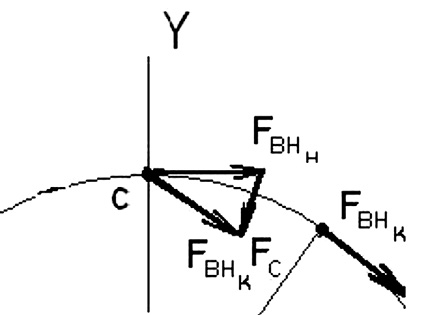
Рис. 2 Схема действующих сил
Рассмотрим движение центра масс – точки С – по окружности (рис. 1, б,в). В соответствии с теоремой о движении центра масс момент от пары сил F2 равен нулю (рис. 1,б). В этом случае вращательная часть движения не рассматривается, а уравнение (3) не используется. Тогда сумма внешних сил, действующих на точку С – центр масс тела, равна SFi = F1 ≠ 0.
Схема сил на рис. 2, в получена путём параллельного переноса суммарного вектора внешних сил из конечного Fвнк в начальное положение Fвнн на бесконечно малой дуге перемещения. Откуда видно, что центростремительная сила является результирующей действия внешних сил, т.е. эквивалентна одной центральной силе Fс, вызывающей движение тела по окружности.
Для материальной точки С система (1-3) принимают следующий вид
m∙аC x = SFi,x; (4)
m∙аCy = SFi,y. (5)
При переходе к одной центральной силе соотношения (4), (5) можно записать в следующем виде
m∙аC = SFвн, = Fc, (6)
где ac = dVx/dt + dVy/dt. (7)
Таким образом, теорема о движении центра масс позволяет исключить из рассмотрения все наперёд неизвестные внутренние силы [6].
Движение точки С по дуге DE моделируется кусочно-линейной траекторией DKE, которая на бесконечно малом отрезке времени стягивается в дугу (рис. 3). Тогда
Sdxi = DK Sdyi = KE.
То есть DK и KE – суммарные проекции на оси OX и OY элементарных линейных перемещений соответственно.
Так как проекции центральной силы Fcx и Fcy – переменные величины (рис. 3), то точка С перемещается по суммарным отрезкам DK и KE с переменным ускорением
ax = a∙sinj; ay = a∙cosj,
где j – угловое перемещений т. С.
Кусочно-линейная модель позволяет свести динамическую задачу, описываемую соотношениями (1)–(3) к задаче прямолинейного равноускоренного движения точки под действием проекций центральной силы.
4. В соответствии с положениями механики [4] приращение кинетической энергии частицы dK на некотором перемещении равно алгебраической сумме работ всех сил dA, действующих на частицу на том же перемещении
dK = dA. (8)
Соотношение (8) справедливо в инерциальной и неинерциальной системах координат [3].
Причём
Ax = –maxSdxi = –max∙r;
Ay = maySdyi = may∙r.
Тогда для прямолинейного и равноускоренного перемещения материальной точки С по суммарным отрезкам DK и KE (рис. 3) можно записать соотношения
![]()
![]() (9)
(9)
где r = OD = DK = KE (для точки С – центра масс – r = 150 млн км, т.к. точка не вращается); ax, ay, Vx, Vy – средние значения проекций ускорения и скорости. При этом результирующие значения работы и энергии на дуге DE равны нулю, что не противоречит исходным данным.
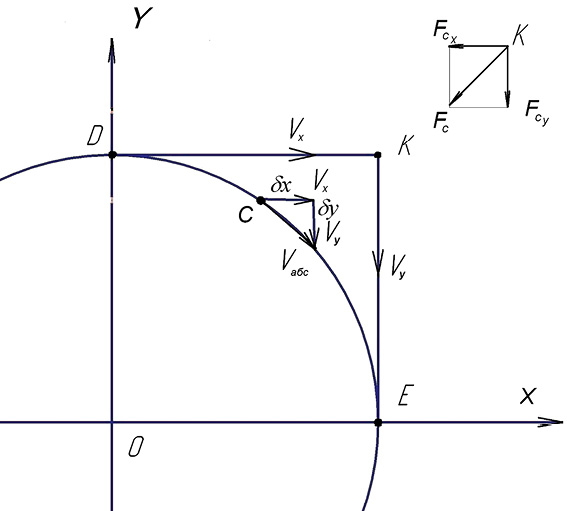
Рис. 3. Схема движения центра масс
Поскольку |ax| = |ay| = aср, то базовая формула расчёта среднего значения центростремительного ускорения для точки С – центра масс, которое определяет движение тела по суммарным отрезкам DK и KE, имеет вид
![]() (10)
(10)
Формула (10) согласуется с известным соотношением для равноускоренного прямолинейного движения по суммарным отрезкам DK и KE, когда начальная (или конечная) скорость равна нулю
![]()
или
![]()
где S = DK = KE = r; Vср – средняя скорость на рассматриваемом отрезке.
5. При моделировании движения центра масс тела – точки С – по окружности (в частности, по дуге DE) кусочно-линейной суммарной траекторией DKE, которая в пределе стягивается в дугу DE, ускорение определяется по соотношению (10). Проекции скоростей на оси координат изменяются следующим образом (рис. 3):
1) при перемещении из точки D в точку K под действием силы Fc,x проекция Vx изменяется от Vmax до 0, а проекция Vy = 0;
2) в точке K скорость равна нулю: Vx = 0; Vy = 0, изменяется направление движения за счёт вращения тела Vmin = 0;
3) при перемещении из точки K в точку E под действием силы Fcy проекция Vx = 0, а проекция Vy изменяется от 0 до Vmax.
Так, на суммарном отрезке DK абсолютная скорость Vабс = Vx и изменяется от Vmax до 0, а на суммарном отрезке KE абсолютная скорость Vабс = Vy и изменяется от 0 до Vmax.
Таким образом, определена динамика движения по окружности точки С – центра масс, которая определяет движение всего тела – шара, но не учитывает его вращение.
Кроме того, определены экстремальные значения скорости Vmax и Vmin.
6. При переходе от движения точки С к движению шара в целом эпюры скоростей показаны на рис. 4, а, б, в. В частности, для вращательной части движения шара эпюра скоростей представлена на рис. 4, в.
 |
||
|
а |
б |
в |
Рис. 4. Эпюры скоростей
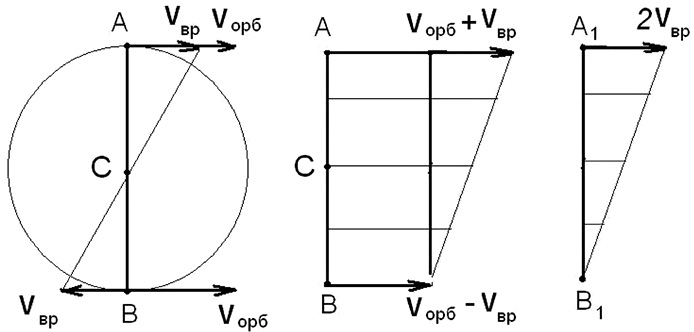
Для кинематического анализа сложного движения шара и определения среднего значения ускорения (а, следовательно, и скорости) используется теорема Шаля: всякое перемещение свободного твёрдого тела из одного положения в другое за время Dt может быть осуществлено посредством поступательного его перемещения, равного перемещению некоторой точки тела и повороту около этой точки (рис. 5) [3]. Причём вращение тела вокруг неподвижной точки можно свести к рассмотрению движения двух точек [3], например, точек А и В.
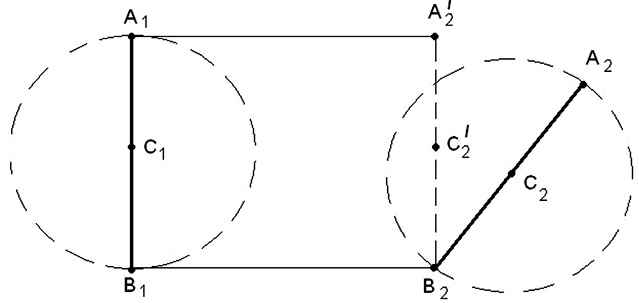
Рис. 5. Схема к теореме Шаля
В качестве «некоторой точки», т.е. полюса, принимается точка В. Если рассматривать движении тела по составляющим на некотором малом участке В1В2 (рис. 5), то вследствие сложения векторов линейная скорость V1 в точке А будет больше, чем V2 в точке В (рис. 4, а, б)
V1 = Vорб + Vвр; V2 = Vорб – Vвр. (11)
Для вращательной части движения при перемещении из т. А’2 в т. А2 (рис. 5) имеет место соотношение
(Vорб + Vвр) – (Vорб – Vвр) = 2Vвр.
В соответствии с теоремой Шаля схема модели перемещения точек А и В по окружности с радиусом OD показана на рис. 6.
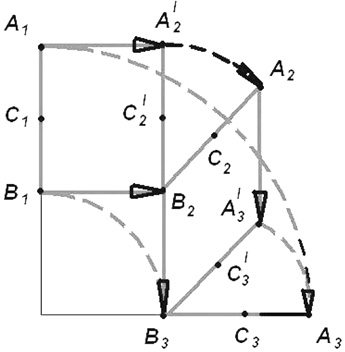
Рис. 6. Схема движения шара с диаметром АВ
Из рис. 6 видно, что из т. В1 в т. В3 полюс В перемещается поступательно по линейным отрезкам В1В2 и В2В3.
В свою очередь, точка А перемещается из т. А1 в т. А3, имея две составляющие движения: поступательную на линейных отрезках А1А’2, А2А’3 и вращательную – по дугам А’2А2 и А’3А3.
Это означает, что для т. А в соответствии с принятой моделью вращательная часть движения совершается с радиусом кривизны равным АВ.
При переходе от движения материальной точки С к движению объёмного тела (шар с диаметром АВ, который движется как показано на рис. 6) максимальное значение скорости т. А (когда центр масс шара находится в точке D на рис. 3) определяется по соотношению
Vmax = Vабс = Vx = Vорб + 2Vвр, (12)
а минимальная скорость будет определяться положением полюса в точке В2 и равна нулю Vmin = 0 (рис. 6).
Необходимо отметить, все точки, принадлежащие окружности с диаметром АВ при сложном движении, проходят через экстремальные точки А и В.
Результатом такого моделирования является средняя по модулю скорость Vабс = const, что не противоречит положению о равномерном движении по окружности.
Тогда скорость V произвольной точки тела на окружности диаметром АВ определяется как среднее значение Vmax и Vmin, т.е. при Vmin = 0
Vср = 0,5(Vорб + 2Vвр). (13)
Таким образом, в соответствии с разработанной моделью определён радиус кривизны вращательной части движения шара, равный диаметру АВ. Кроме того, определены экстремальные значения скоростей, которые имеют место на окружности с диаметром АВ.
Экстремальные значения скоростей позволяют найти интеграл функции ускорения (скорости) или в простейшем случае – среднее значение ускорения (скорости) в произвольной точке, принадлежащей поверхности шара с диаметром АВ.
2. Анализ адекватности модели
Адекватность модели подтверждается сравнением результатов расчёта с экспериментальными (справочными) данными на следующих примерах.
Пример 1.
Рассматривается движение планеты Земля вокруг Солнца в инерциальной гелиоцентрической системе координат XOY из точки D в точку Е (рис. 3) с дополнительными допущениями.
1. Рассматривается движение по окружности с радиусом r = OD (рис. 3).
2. Тело движется плоскопараллельно из т.D в т.E по эквипотенциальной траектории, т.е. в однородном поле гравитации.
3. На Землю воздействует внешняя центростремительная сила, т.е. имеет место соотношение (10).
Тогда в соответствии с разработанной моделью поступательного движения вращающегося тела центростремительное ускорение на поверхности Земли определяется по соотношению (10) с учётом (13) и результат расчёта принимает вид
aср = (0,5(Vорб+ 2Vвр))2/2D =
= (0,5(30∙103+2∙0,5∙103))2/2∙12,744∙103 = 9,43 м/с2, (14)
где D = 2R = 12,744∙103 км (R – средний радиус Земли); Vорб = 30 км/с; Vвр = 0,5 км/с.
Справочное значение ускорения силы тяжести 9,80 м/с2. Расхождение определения ускорения силы тяжести по сравнению со справочным значением [5] составляет 3,7 %.
На основе разработанной модели рассчитывается и гравитационная постоянная, по формуле, приведённой в работе [1]
![]() (15)
(15)
где G – гравитационная постоянная; M – масса Земли; x = R – rэ; r = 4,70∙106 мэ – эксцентриситет вращения Земли [6].
Справочное значение гравитационной постоянной 6,67∙10–11 Нм2/кг2 [5]. Размерность м3/(кг∙с2) тождественна Нм2/кг2. Расхождение определения гравитационной постоянной по сравнению со справочной величиной составляет 0,9 %.
Пример 2.
Рассматривается движение Луны вокруг Земли в той же системе координат.
В соответствии с разработанной моделью центростремительное ускорение на поверхности Луны определяется по соотношению (14)
aср = (0,5(Vорб+ 2Vвр))2/2D = = (0,5(1∙103+2∙30∙103))2/2∙384∙106 = 1,23 м/с2,
где D = 384∙106 м – среднее расстояние от Луны до Земли; Vорб = 1∙103 м/с; Vвр = (4,6+30∙103) ≈ 30∙103 м/с – экстремальное значение скорости при совпадении вектора скорости вращения Луны с вектором орбитальной скорости Земли.
Ускорение силы тяжести на Луне, определённое по закону всемирного тяготения, составляет
![]()
где Mл – масса Луны; Rл – радиус Луны [5]. Расхождение составляет 24 %.
Удовлетворительная сходимость результатов расчёта ускорения силы тяжести и гравитационной постоянной с экспериментальными данными подтверждает адекватность модели.
Разработанная модель позволяет объяснить гироскопический эффект (рис. 7).
Вследствие совместного переносного и относительного (орбитального и вращательного) движения ротора возникает центростремительная сила, которая обеспечивает устойчивость гироскопа к внешним воздействиям. В частности, не даёт ему упасть под действием силы тяжести mg (рис. 7).
Ориентация ротора ГТД в соответствии с направлением векторов внешних сил позволяет изменить величину суммарного вектора внешних сил и уменьшить нагрузку на двигатель.
Одним из частных случаев реализации предлагаемой модели применительно к ГТД является использование ориентации ротора двигателя и летательного аппарата с целью снижения внешних нагрузок.
Например, можно расположить летательный аппарат в соответствии с направлением векторов скоростей Vорб, Vвр так, чтобы центростремительное ускорение, возникающее вследствие вращения ротора ГТД, было направлено в противоположную сторону ускорения силы тяжести. В результате получим уменьшение величины силы тяжести, действующей на летательный аппарат.
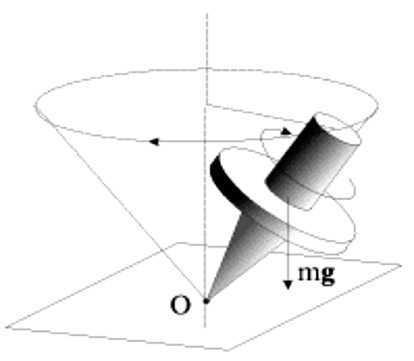
Рис. 7. Схема прецессии гироскопа
Выводы
Применение разработанной модели силы тяжести позволяет заложить основу для снижения нагрузок на двигатель (тем самым повысить долговечность элементов ГТД); увеличения подъёмной силы летательного аппарата за счёт соответствующей ориентации векторов действующих сил; объяснения физической сущности гироскопического эффекта.
Рецензенты:
Газизов Х.Ш., д.т.н., профессор кафедры сопротивления материалов, ФГБОУ ВПО УГАТУ, г. Уфа;
Целищев В.А., д.т.н., профессор, заведующий кафедрой прикладной гидромеханики ФГБОУ ВПО УГАТУ, г. Уфа.
Работа поступила в редакцию 08.04.2013.
Библиографическая ссылка
Бадамшин И.Х. ВЛИЯНИЕ ЭВОЛЮЦИЙ ЛЕТАТЕЛЬНОГО АППАРАТА НА УСИЛИЯ, ДЕЙСТВУЮЩИЕ В ГТД // Фундаментальные исследования. 2013. № 6-2. С. 251-257;URL: https://fundamental-research.ru/en/article/view?id=31492 (дата обращения: 07.07.2026).