


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
ASSESSMENT OF QUALITY OF MOVING OF OUTPUT UNIT OF THE ROLLER SCREW MECHANISM

В процессе разработки и исследования функционирования роликовинтового механизма возникает необходимость оценки качества различных вариантов конструкций, сравнения с уже существующими моделями либо анализа на соответствие заданным входным параметрам. Одними из основных показателей качества работы РВМ, определяющими его пригодность для решения тех или иных задач, является точность и плавность перемещения выходного звена.
Для оценки различных механизмов линейного движения применяют показатели кинематической точности, регламентированные ISO 3408-3. В нём в качестве критериев, характеризующих класс точности, используются максимальная величина отклонения средней линии действительного перемещения (е) и ширина полосы линии отклонений действительного перемещения (Vи). На рис. 1 показана схема для определения параметров кинематической верности передачи.
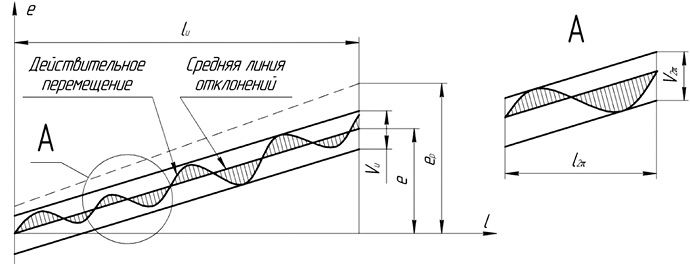
Рис. 1. Схема для определения параметров кинематической точности передачи
Однако данный показатель не позволяет оценить плавность движения, так как не учитывает характер перемещения выходного звена. Поэтому возникла необходимость применять дополнительные показатели качества движения.
Наибольшее распространение получила оценка плавности с помощью коэффициента неравномерности [3, 4]
![]()
где vmax, vmin и vср – наибольшее, наименьшее и среднее значения скорости за цикл.
Здесь нужно отметить, что не совсем удачно выбирать в качестве эталона среднюю цикловую скорость vср, которая зависит от возмущения и может обращаться в ноль. Объективнее определять коэффициент неравномерности с помощью заданного (требуемого) значения скорости v0:
![]()
Оценка характеризует относительный размах колебаний скорости. Однако коэффициент d не позволяет различать частоту неравномерности движения, оценивая только среднюю амплитуду колебаний. Показатель плавности должен отражать динамичность проявления неравномерности, что и было предложено в критерии [1, 3]:
![]()
где T – время наблюдения (время цикла); v(t) – мгновенное значение скорости.
Данный показатель более объективно оценивает неравномерность движения, но является, в сущности, интегральным критерием точности по скорости. Понятно, что критерий должен учитывать не только изменения скорости, но и ускорения, а в некоторых случаях и скорость изменения ускорения.
В работе [2] были предложены показатели плавности как для вращательного, так и для поступательного движения. Причём эти показатели приведены в двух видах – интегральном и вариационном:
• показатель точности по скорости поступательного движения:
![]()
• показатель плавности 1-го рода поступательного движения:
![]()
• показатель плавности 2-го рода поступательного движения:
![]()
Применение в совокупности указанных показателей позволяет оценить и сравнить качество движения выходного звена привода линейных перемещений, каковым и является РВМ.
Удобство применения показателей заключается в том, что если подынтегральная функция существует и непрерывна, применяется интегральная формулировка показателей. Как правило, это возможно при исследовании математических моделей приводов, когда динамические характеристики v(t) и a(t) являются решениями дифференциальных уравнений.
В противном случае показатели определяются через полную вариацию соответствующих функций. Такой вариант расчёта удобен при использовании численных методов, а также при определении качества движения по совокупности экспериментальных данных.
Ограничением для применения вышеуказанных показателей является вид заданного перемещения. Параметры плавности и точности по скорости допускают проведение исследования при линейном заданном законе движения. Такое условие выполняется лишь в некоторых случаях поступательного движения (т.е. без реверса и без остановки). Однако зачастую заданный закон движения для привода линейных перемещений является реверсивным, к тому же при реверсе проявляет себя такая нелинейность, как люфт, который является в некоторых случаях основным источником неплавности передачи.
Ещё одним недостатком показателей плавности является их интегральная (средняя за период наблюдения) оценка воздействия выходного звена на рабочий орган.
Также к недостаткам интегральных показателей для применения оценки качества линейных перемещений является зависимость их величины от длины рабочего хода выходного звена привода. То есть даже для одного и того же привода, но при разных длинах рабочего хода можно получить различные значения показателей плавности. Зависимость показателей плавности от длины рабочего хода показана на рис. 2.
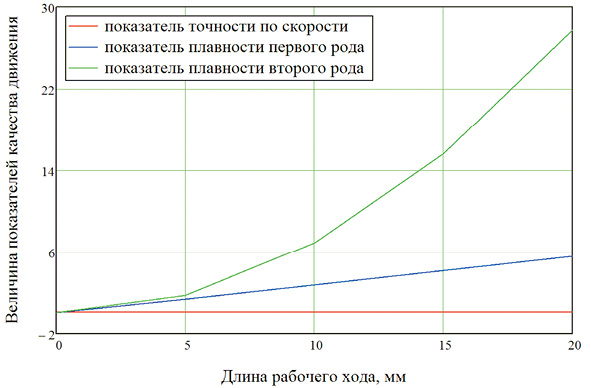
Рис. 2. Зависимость интегральных показателей плавности от длины рабочего хода
Таким образом, возникает необходимость в альтернативных показателях плавности движения. Такие показатели должны отражать физическую сущность неплавного движения, быть независимыми от условий испытаний, иметь максимально возможную информативность. Удовлетворение данным требованиям позволит показатели плавности движения использовать в качестве технической характеристики передачи либо привода в целом.
При определении степени кинематической точности по ISO 3408-3 накладывается ограничение по виду заданного закона перемещения выходного звена, т.е. движение должно быть равномерным. Исходя из этого допущения предложены альтернативные показатели качества движения, позволяющие избавиться от зависимости значений показателей плавности от длины рабочего хода.
В качестве альтернативной оценки предлагается использовать совместно среднее относительное отклонение и величину максимальных размахов соответствующих параметров (скорости, ускорения или производной ускорения).
Среднее относительное отклонение параметра движения определяется по формуле:
![]()
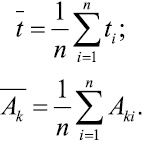
где k – степень показателя плавности; ak – статистическая оценка модуля параметра движения соответствующей степени; v0 – заданная скорость перемещения. Оценка параметра движения ak определяется по формулам линейного регрессионного анализа:
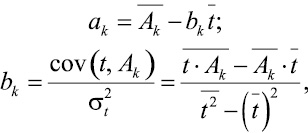
где выборочные средние значения переменных t и Ak:
Модуль параметра движения, соответствующего степени показателя
![]()
где s(t) – функция перемещения выходного звена.
Для вычисления показателей применяется встроенная функция пакета MathCAD14:
![]()
Исходя из условия равномерного движения (v0 = const) максимальные размахи соответствующих параметров определятся как
![]()
В таблице показана совокупность показателей качества движения выходного звена РВМ. Данные показатели достаточно полно характеризуют исследуемый механизм по кинематической точности и плавности перемещения выходного звена.
Анализ единицы измерения предложенных показателей качества движения доказывает, что данные показатели хорошо согласуются и являются расширением показателей кинематической погрешности по ISO 3408-3.
Показатели плавности качества движения выходного звена РВМ
|
Показатель |
Метод определения |
Единицыизмерения |
|
Кинематическая погрешность |
||
|
Отклонение средней линии действительного перемещения (е) |
по ISO 3408-3 |
м |
|
Ширина полосы линии отклонений действительного перемещения (Vи) |
по ISO 3408-3 |
м |
|
Ширина полосы линии отклонений действительного перемещения в пределах одного оборота входного вала (V2π) |
по ISO 3408-3 |
м |
|
Показатели точности по скорости |
||
|
Средний относительный показатель скорости |
|
- |
|
Максимальный размах скорости |
|
м/с |
|
Показатели плавности первого рода |
||
|
Средний относительный показатель ускорения |
|
м–1 |
|
Максимальный размах ускорения |
|
м/с2 |
|
Показатели плавности второго рода |
||
|
Средний относительный показатель производной ускорения |
|
м–2 |
|
Размахи производной ускорения |
|
м/с3 |
Графики зависимости значений средних относительных отклонений соответствующих параметров от длины рабочего хода (рис. 3) иллюстрируют постоянство альтернативных показателей плавности.
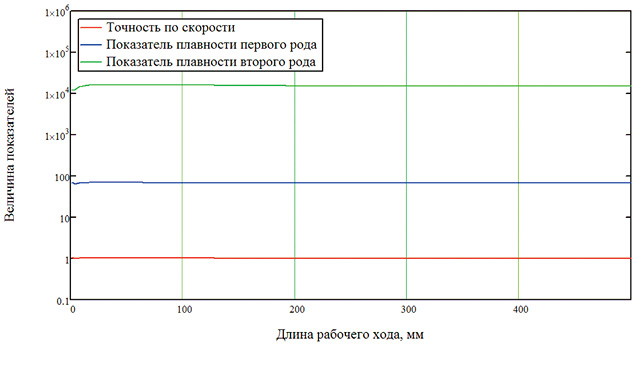
Рис. 3. Показатели качества движения – среднее относительное отклонение
Таким образом, показатели плавности, определённые по методу средних относительных отклонений параметров, могут быть использованы в качестве технической характеристики РВМ либо привода в целом.
Причём они обладают наглядной информативностью. По данным показателям можно определить паразитную динамическую нагрузку на рабочий орган в зависимости от предполагаемой скорости перемещения выходного звена и приведённой массы рабочего органа.
![]()
где Fин(v) – средняя паразитная инерционная нагрузка на рабочий орган как функция скорости перемещения; mРО – приведённая масса рабочего органа; J1 – средний относительный показатель ускорения.
Рецензенты:
Гоц А.Н., д.т.н., профессор кафедры тепловых двигателей и энергетических установок ФГБОУ ВПО «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых», г. Владимир;
Кульчицкий А.Р., д.т.н., профессор, заместитель главного конструктора по испытаниям ООО «Владимирский моторо-тракторный завод», г. Владимир.
Работа поступила в редакцию 03.12.2012.
Библиографическая ссылка
Жданов А.В., Степенькин А.В., Штых Д.В. ОЦЕНКА КАЧЕСТВА ПЕРЕМЕЩЕНИЯ ВЫХОДНОГО ЗВЕНА РВМ // Фундаментальные исследования. 2013. № 1-2. С. 379-383;URL: https://fundamental-research.ru/en/article/view?id=30956 (дата обращения: 21.06.2026).