


Scientific journal
Fundamental research
ISSN 1812-7339
"Перечень" ВАК
ИФ РИНЦ = 1,798
USE OF THE ELECTROROCKET ENGINE IN IMPELLENT INSTALLATION AT ORIENTATION OF SPACE LABORATORY

Проблема создания благоприятных условий для успешной реализации гравитационно-чувствительных технологических процессов остается актуальной, несмотря на свою давнюю историю [1]. Были предложены различные способы создания микрогравитационного штиля внутри рабочей зоны технологического оборудования.
В работе [2] рассматривается пример космического аппарата (КА) серии «Фотон», лишенного больших упругих элементов. Оценки показывают, что уровень мироускорений на таких аппаратах близок к оптимальному, однако малый срок активного существования (до 18 суток) [3] не позволяет рассматривать их как прообразы космических мини-заводов.
В работе [4] анализируется эффект от применения специализированного устройства компенсации микроускорений. Данный подход предполагает создание благоприятных условий не во всей внутренней среде КА, а только в специализированном устройстве. Однако использование устройства существенно уменьшает рабочее пространство для реализации технологических проектов, значительно усложняет оценку микроускорений путем математического моделирования и вряд ли будет использовано при создании специализированных мини-заводов. Речь может идти о применении такого подхода для проведения гравитационно-чувствительных экспериментов на КА общего назначения, но не о серийном производстве в космосе. Аналогичные исследования проводили и зарубежные ученые [5], однако существенного результата в решении проблемы достигнуто не было.
В работе [6] проведен анализ ситуации, когда конструктивными приемами удалось снизить самую опасную квазистатическую компоненту микроускорений до пренебрежимо малого значения. Однако энерговооруженность КА «Spot-4» недостаточна для использования этого аппарата в качестве прототипа будущего космического мини-завода. Единственная панель солнечной батареи (ПСБ) была прикреплена к корпусу КА посредством упругой штанги. С одной стороны, этот шаг позволил существенно сократить вибрации, передаваемые за счет колебаний ПСБ на корпус КА, однако с другой ‒ исключает возможность жесткой ориентации ПСБ на Солнце и, как следствие, проведение энергоемких технологических процессов. Такой подход может быть использован для ряда гравитационно-чувствительных процессов, не требующих больших затрат энергии на свою реализацию, однако для большинства процессов является неприемлемым.
Работа [3] посвящена моделированию движения КА, имеющего большие упругие элементы в своей конструктивно-компоновочной схеме (ККС), с целью оценки микроускорений. Для такого случая определяющим возмущением является воздействие двигателей при управлении движением КА вокруг центра масс. В [3] дана классификация моделируемых микроускорений, основные упрощающие гипотезы сформулированы в работе [7], в [8] предложено использование параметров, повышающих точность оценки в модели вращательного движения КА вокруг центра масс.
Модель движения КА вокруг центра масс с учетом вышесказанного будет иметь вид:
 (1)
(1)
где Rxk, Ryk, Rzk ‒ координаты точки крепления k-го упругого элемента к корпусу КА в главной связанной системе координат; Sk ‒ координата бесконечно малой массы k-го упругого элемента вдоль его продольной оси, отсчитываемая от точки крепления этого элемента к центральному твердому телу; E ‒ модуль Юнга; (0; υk; wk) ‒ вектор перемещения точек упругих элементов в k-й системе координат; lk ‒ длина k-го упругого элемента; αk(αk11 и т.д.) ‒ матрица направляющих косинусов между k-й вспомогательной и главной связанной системой координат и ее компоненты; μk ‒ погонная масса k-го упругого элемента; t ‒ временной параметр;  ‒ тензор инерции КА в главных осях инерции;
‒ тензор инерции КА в главных осях инерции;  ‒ вектор углового ускорения КА;
‒ вектор углового ускорения КА;  ‒ вектор возмущающего момента относительно центра масс КА.
‒ вектор возмущающего момента относительно центра масс КА.
Динамика микроускорений при импульсном воздействии двигателя ориентации для схемы космической лаборатории типа «Ника-Т» приведена на рис. 1. При включении двигателя создается недопустимо высокий уровень микроускорений, поэтому на весь период проведения технологического процесса двигатель включаться не может. Именно срабатыванием двигателей в процессе реализации гравитационно-чувствительных процессов можно объяснить неудачи ряда серий экспериментов на борту орбитальной космической станции «Skylab» [9].
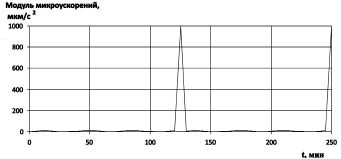
Рис. 1. Динамика модуля микроускорений от времени для КА типа «Ника-Т»
Однако необходимо поддерживать заданную ориентацию ПСБ на Солнце. Для КА типа «Ника-Т» косинус угла между направлением на Солнце и нормалью к ПСБ должен быть выше 0,9. Устройства пассивной ориентации КА (УПО), такие, как силовые гироскопы и гиродины, способны некоторое время ориентировать КА, затем при достижении критической угловой скорости вращения маховиков УПО необходимо производить разгрузку кинетического момента УПО, т.е. включать двигатели ориентации.
Поскольку без включения двигателей не обойтись, в работе рассматривается вопрос о том, как увеличить интервал между включениями двигателей. Предлагается использовать электроракетный двигатель (ЭРД) в режиме постоянной работы. Это будет дополнительным устройством к классической двигательной установке, осуществляющей ориентацию и управление движением КА. Работа ЭРД должна быть построена таким образом, чтобы компенсировать часть возмущений, воздействующих на КА. В этом случае маховики УПО будут медленнее набирать критический кинетический момент, а интервал между включениями двигателей будет увеличен. При этом сам по себе ЭРД не вызовет критических микроускорений. Поскольку главным возмущающим фактором при неработающих двигателях ориентации являются колебания ПСБ, был проведен анализ микроускорений, которые создал бы постоянно работающий ЭРД при отсутствии других возмущений.
Для балочного представления упругих элементов уравнения их пространственных колебаний будут иметь вид:
 (2)
(2)
Для представления упругих элементов в виде однородной ортотропной пластины уравнения их колебаний будут иметь вид:
 (3)
(3)
где обозначения те же, что и в (1). Дополнительно D ‒ цилиндрическая жесткость пластины на изгиб, EJ ‒ жесткость балочного упругого элемента.
При условии жесткого крепления упругих элементов к корпусу КА, которое является самым неблагоприятным, поскольку все колебания без потерь в узле крепления передаются корпусу КА, модуль микроускорений, порождаемых постоянно работающим ЭРД тяги 30 мН, для схемы КА типа «Ника-Т» представлен на рис. 2.
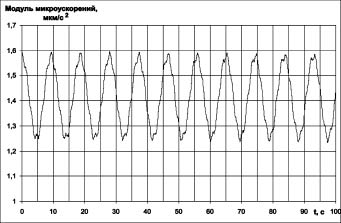
Рис. 2. Динамика микроускорений от ЭРД для КА типа «Ника-Т»
При допустимых по проекту «Ника-Т» 20 мкм/с2 ЭРД не создает и 10 % от этого значения. Следовательно, замена участка пассивной ориентации КА с помощью УПО активным участком (ЭРД и УПО) не создает недопустимых микроускорений между включениями двигателей ориентации. При этом в зависимости от алгоритма управления ЭРД можно получить троекратное увеличение интервала между включениями двигателей ориентации. Решение задачи оптимального управления ЭРД является отдельной темой и в рамках данной работы не рассматривается.
Существуют предложения об использовании плазмы космического пространства в качестве топлива для ЭРД [10]. Однако для создания тяги около 30 мН потребуется экран огромной площади. Поскольку околоземное пространство изобилует космическим мусором, то этот подход вряд ли окажется эффективным при использовании для нужд околоземного космического производства.
Таким образом, проведенные исследования показали эффективность применения ЭРД в комбинации с классической двигательной установкой ориентации и управления движением КА для космических лабораторий, на борту которых проводятся гравитационно-чувствительные технологические процессы. При этом может быть увеличен срок активного существования лаборатории за счет экономии топлива двигательной установки.
Данная работа выполнена в рамках программы «У.М.Н.И.К.» при поддержке Фонда содействия развитию малых форм предприятий в научно-технической сфере по проекту «Инновационные разработки двигательных установок для космических мини-заводов».
Список литературы
- Седельников А.В. Проблема микроускорений: 30 лет поиска решения // Современные наукоемкие технологии. ‒ 2005. ‒ № 4. ‒ С. 15-22.
- Абрашкин В.И., Казакова А.Е., Сазонов В.В., Чебуков С.Ю. Определение вращательного движения спутника Фотон М-2 по данным бортовых измерений угловой скорости //
Космические исследования. ‒ 2008. ‒ Т. 46, №2. ‒ С. 148-167. - Седельников А.В. Проблема микроускорений: от осознания до фрактальной модели. Ч.1. Физическая модель квазистатической компоненты микроускорений. ‒ М.: РАН, Избранные труды Российской школы, 2010. ‒ 107 с.
- Левтов В.Л., Романов В.В., Иванов А.И., Рябуха С.Б., Сазонов В.В. Результаты летно-космических испытаний виброзащитной платформы ВЗП-1К // Космические исследования. ‒ 2001. ‒ Т. 39, № 2. ‒ С. 148-160.
- Owen R.G., Jones D.I., Owens A.R., Robinson A.A. Integration of a microgravity isolation mount within a Columbus single rack // Acta Astronautica. ‒ 1990. ‒ vol. 22. ‒ Р. 127-135.
- Седельников А.В., Подлеснова Д.П. Космический аппарат «Спот-4» как пример успешной борьбы с квазистатической компонентой микроускорений // Известия высших учебных заведений. Северокавказский регион. Естественные науки. ‒ 2007. ‒ № 4 (140). ‒ С. 44-46.
- Седельников А.В., Серпухова А.А. Фрактальная модель микроускорений: физический аспект // Известия СНЦ РАН. ‒ 2009. ‒ Т. 11, №5. ‒ С. 185-191.
- Седельников А.В., Серпухова А.А. Моделирование движения упругого космического аппарата в целях оценки микроускорений // Изв. вузов. Авиационная техника. ‒ 2009. ‒ № 4. ‒ С. 71-72.
- Седельников А.В., Корунтяева С.С., Подлеснова Д.П. Фрактальная модель микроускорений: оценка и эксперименты на космической станции «Скайлаб» // Труды 8-й Международной конференции «Актуальные проблемы современной науки». Естественные науки. Часть 3. Механика Машиностроение, 2007. ‒ С. 105-108.
- Патент РФ 2304068 C2 17.08.2001.
Рецензенты:
Данильченко Валерий Павлович, д.т.н., профессор, главный конструктор СНТК им. Кузнецова;
Мантуров Александр Иванович, д.т.н., профессор, начальник отдела ФГУП ГНПРКЦ «ЦСКБ-Прогресс».
Библиографическая ссылка
Седельников А.В, Серпухова А.А ИСПОЛЬЗОВАНИЕ ЭЛЕКТРОРАКЕТНОГО ДВИГАТЕЛЯ В ДВИГАТЕЛЬНОЙ УСТАНОВКЕ ПРИ ОРИЕНТАЦИИ КОСМИЧЕСКОЙ ЛАБОРАТОРИИ // Фундаментальные исследования. 2010. № 12. С. 153-157;URL: https://fundamental-research.ru/en/article/view?id=17448 (дата обращения: 11.07.2026).