



Организация обороны нашей страны является одной из важнейших задач, решаемых государством. На характер и масштабы проводимых мероприятий по развитию вооруженных сил Российской Федерации (ВС РФ) оказывает непосредственное влияние складывающаяся военно-политическая обстановка в мире, которая в современных условиях приобретает все более непредсказуемый и взрывоопасный характер. В настоящее время ВС РФ претерпевают значительные изменения, в первую очередь связанные с проведением военной реформы. Большую роль в данных преобразованиях играет модернизация вооружения и военной техники (ВВТ) и поставка ее в войска.
Целью исследования является всесторонний анализ способов повышения оперативности перевода в боевое положение комплексов и систем военного назначения, а также оценка технических средств, обеспечивающих выполнение данной функции.
Проанализировав современные образцы ВВТ, а также грузоподъемные машины (ГПМ) двойного назначения, имеющие опорную платформу, системы и устройства ее выравнивания в горизонтальной плоскости, разделим их на следующие группы:
1. Мобильные радиолокационные станции.
2. Ракетные системы залпового огня.
3. Зенитно-ракетные комплексы.
4. Тактические ракетные комплексы
5. Средства наземного обслуживания (автокраны, бурильные машины, автовышки).
Помимо упомянутых образцов ВВТ и ГПМ существует большое количество других узкоприменимых машин, имеющих платформу с выносными аутригерами.
Применение систем выравнивания в горизонтальной плоскости опорных платформ ВВТ в автоматическом режиме обеспечивает, с одной стороны, более эффективное применение образцов ВВТ, а с другой – сокращает время перевода боевых машин с марша в боевое положение. Адаптивный режим работы таких систем позволяет оператору сконцентрировать свое внимание на выполнении последующих операций.
Для определения углов наклона опорных платформ ВВТ в продольной и поперечной плоскостях используются такие приборы, как инклинометры (от лат. incline – наклоняю).
В настоящее время на боевом дежурстве ВС РФ стоят комплексы и системы военного назначения, предназначенные для поражения сил и средств противника (наземные средства разведывательно-ударных комплексов, пункты управления, стоянки самолетов и вертолетов, резервов, хранилищ боеприпасов, топлива и др.) в глубине обороны противника на расстоянии до 120 километров. На подготовку к пуску с марша по нормативам отводится не более 20 минут. Значительная часть этого времени уходит на обеспечение устойчивости пусковых установок при пуске, которое проводится в полуавтоматическом или ручном режимах, с помощью 4-х домкратов. В качестве устройств, обеспечивающих выравнивание опорных платформ в горизонтальной плоскости, используются креномеры пузырькового типа. Технические характеристики устройств, определяющих положение опорной платформы, значительно снижают оперативность перевода в боевое положение комплексов и систем военного назначения. Корректировка горизонтального положения опорных платформ боевых машин, а также ГПМ при неоднократной смене рабочих позиций ведет к снижению производительности и увеличению затрат на эксплуатацию, которые связаны с износом узлов и механизмов, увеличением расхода топлива (особенно при переводе из походного в боевое положение) и повышением трудоемкости операции выравнивания в горизонтальной плоскости.
В связи с этим разработка и внедрение датчиков наклона в процесс выравнивания опорных платформ в горизонтальной плоскости, позволяющих произвести вывешивание опорной платформы на минимальной высоте над опорной поверхностью, увеличивающих запас управляемости углами наклона опорной платформы – является актуальным.
Современный этап развития инклинометров характеризуется продолжающимся поиском новых конструкций, направленных на более полное удовлетворение нужд отраслей промышленности.
По способу регистрации объекта датчики наклона разделяются на следующие виды: механические, фоторегистрационные, электрометрические и химические. Регистрация может проводиться как в инклинометре непосредственно, так и дистанционно. В настоящее время в основном применяются дистанционные электронные методы регистрации. [6].
Проведенный анализ показал, что на сегодняшний день для выравнивания в горизонтальной плоскости опорных платформ различных машин и механизмов используется широкое многообразие датчиков контроля угла наклона.
Рассмотрение существующих образцов ВВТ, средств наземного обслуживания и ГПМ позволило сделать вывод, что применяемые на них устройства, осуществляющие выравнивание в горизонтальной плоскости, не обеспечивают необходимую эффективность их боевого применения, экономически выгодную и надёжную эксплуатацию. Сложность конструкции и высокая себестоимость подобных устройств дают повод для разработки принципиально новых, недорогих в изготовлении и надежных устройств, обеспечивающих высокую эксплуатационную эффективность существующих образцов ВВТ и ГПМ. В связи с этим предлагается разработать способ адаптивного выравнивания в горизонтальной плоскости опорной платформы, осуществляемый с помощью адаптивной системы выравнивания опорных платформ (АСВОП), обеспечивающий сокращение сроков перевода в боевое положение образцов ВВТ, снижение вероятности ошибок оператора и трудоемкости операций подготовки к боевому применению.
Способ адаптивного выравнивания в горизонтальной плоскости опорной платформы заключается в увеличении опорного контура и выравнивании в горизонтальной плоскости опорных платформ за счет изменения высоты штоков аутригеров при возможном проседании опорной поверхности под выносными аутригерами в зависимости от физико-механических свойств опорной поверхности и погодных условий. После включения АСВОП выполняется операция вывешивания опорной платформы на аутригерах. Соприкосновение штока аутригера с опорной поверхностью на выходе соответствующего датчика вырабатывает сигнал, который поступает в блок управления, где формируется команда на выключение аутригера. При соприкосновении всех аутригеров с опорной поверхностью включается режим адаптивного выравнивания в горизонтальной плоскости опорных платформ. Затем датчик контроля угла наклона оценивает положение опорной платформы и в случае ее отклонения от горизонтальной плоскости подает сигналы в блок управления на выдвижение штоков соответствующих аутригеров. После завершения выравнивания опорной платформы в горизонтальном положении блок управления блокирует аутригеры, а АСВОП находится в готовности своевременно провести корректировку положения опорной платформы в случае ее повторного и последующих отклонений от горизонтальной плоскости.
Способ адаптивного выравнивания в горизонтальной плоскости опорной платформы должен включать следующие этапы:
1. Обоснование требований к конструкции и компоновки АСВОП.
2. Требования к конструкции элементов АСВОП.
3. Последовательность выполнения операций выравнивания в горизонтальной плоскости опорной платформы с целью обеспечения заданной эффективности и надежности.
В рамках предъявляемых требований предлагается функциональная схема АСВОП, представленная на рис. 1.
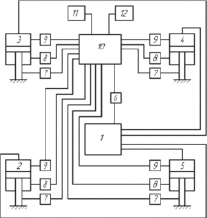
Рис. 1. Функциональная схема АСВОП
В состав АСВОП входят следующие элементы: опорная платформа 1 с размещенными на ней по углам аутригерами 2, 3, 4, 5. На опорной платформе закреплен датчик контроля угла наклона опорной платформы 6. Каждый аутригер 2, 3, 4, 5 оборудован датчиком контакта штока аутригера с опорной поверхностью 7 и датчиком давления в поршневой полости аутригера 8. Датчик контроля угла наклона опорной платформы 6 своим выходом соединен с информационным входом блока управления 10. Другими информационными входами блок управления 10 связан с датчиками контакта штоков аутригеров с грунтом 7 и датчиками давления в поршневой полости аутригеров 8. Управляющими выходами блок управления 10 связан с электромагнитными клапанами 9, выходы которых, в свою очередь, подключены к входам выносных аутригеров 2, 3, 4, 5. Другой управляющий выход блока управления 10 является входом блока аварийной сигнализации 11. Включение и отключение устройства производится блоком включения и отключения 12, выход которого является входом блока управления [3, 7].
Использование следующих элементов обеспечивает следующее:
1. Датчик давления в поршневой полости аутригера позволяет отслеживать степень нагружения опоры.
2. Датчики контакта штоков аутригеров с опорной поверхностью позволяют произвести вывешивание опорной платформы на минимальной высоте над опорной поверхностью.
3. Датчик контроля угла наклона обеспечивает точное выравнивание в горизонтальной плоскости и удержание в этом положении при возможном воздействии внешних сил.
Гидравлическая схема АСВОП представлена на рис. 2, и состоит из следующих элементов: аутригеры 2, 3, 4, 5, гидравлический бак 13, шестеренный насос постоянной подачи 14, фильтр 15, трехпозиционный электромагнитный клапан 16, двухпозиционный электромагнитный клапан 17. Каждый гидроцилиндр оборудован гидрозамком. Также в систему включен предохранительный клапан 18 [2, 4, 8, 9].
Работа гидросистемы устройства осуществляется следующим образом. В нейтральном положении всех секций электромагнитных клапанов 16, 17 поток рабочей жидкости от питающего насоса 14 поступает в гидробак 13 через фильтр 15. При подаче напряжения на электромагнитные клапаны 16, 17 происходит перенаправление потока жидкости в одну из рабочих полостей соответствующего аутригера. Гидрозамки на аутригерах и предохранительный клапан 18 служат для предотвращения аварийной ситуации.
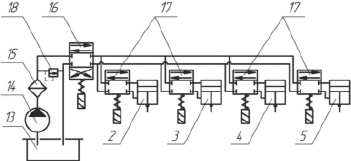
Рис. 2. Принципиальная гидравлическая схема
В отличие от существующих систем выравнивания АСВОП должна быть оборудована: быстродействующим датчиком контроля угла наклона конструкции с заданными параметрами точности и датчиками контакта штоков аутригеров с поверхностью [6].
В настоящее время большинство серийно выпускаемых образцов ВВТ оснащены гидроприводом управления аутригерами. Несмотря на многообразие схем гидроприводов, количество гидроэлементов, входящих в них, относительно мало: насос, гидроцилиндр, дроссель, трубопровод, распределитель, клапан [2, 4].
Можно выделить два направления математического описания гидроприводов.
Первое направление заключается в представлении гидроэлементов в виде передаточных функций и основывается на экспериментальных исследованиях, при этом реальный переходный процесс элементов гидропривода аппроксимируется с некоторой точностью передаточными функциями [4].
При описании электрогидропривода в качестве входного воздействия принята выходная координата порогового элемента, в качестве выходной величины – перемещение штока гидроцилиндра.
В своей работе В.В. Беляев предложил общую передаточную функцию гидропривода. Так как объемный гидропривод обладает следующими общими свойствами: время запаздывания, постоянная скорость перемещения штоков исполнительных гидроцилиндров в установившемся режиме, процессы разгона и торможения штока гидроцилиндра, то можно выделить следующие характерные стадии переходного процесса [1]:
1. Стадия запаздывания, во время которой шток находится в покое после включения распределителя.
2. Стадия разгона, время разгона штока до номинальной скорости.
3. Стадия установившегося движения.
В связи с этим точность моделирования гидропривода при этом способе определяется точностью экспериментальных замеров и аппроксимацией переходных процессов. Недостатком данного способа является отсутствие учета многих параметров, влияющих на работу гидропривода, что обусловливает упрощение математической модели в целом.
Второе направление заключается в том, что каждый из элементов, входящих в гидропривод, представляется в виде многомерных динамических объектов, использующих векторно-матричную форму записи уравнений [4].
Динамические свойства многомерных объектов характеризуются уравнениями движения, связывающими выходные и входные величины объектов, которые составляются на основе законов физики при рассмотрении процессов преобразования и передачи информации [9].
В работе Г.В. Птицына математическое описание гидропривода представлено в виде дифференциальных уравнений, описывающих внутренние динамические процессы в гидросистеме [10].
Второй способ обладает высокой точностью описания динамических процессов, происходящих в гидроприводе.
Таким образом, использование датчиков контроля угла наклона опорной платформы с заданной быстротой действия и точностью измерения обеспечивает возможность устранения угла наклона опорной платформы в двух горизонтальных плоскостях независимо, при этом допускается выдвижение до 3-х штоков силовых цилиндров одновременно, что позволяет сократить время, затрачиваемое на процесс выравнивания в горизонтальной плоскости опорных платформ образцов ВВТ, произвести вывешивание опорной платформы на минимальной высоте над опорной поверхностью, увеличивая запас управляемости углами наклона опорной платформы при возможном воздействии внешних сил (скорость ветра, тип опорной поверхности, квалификации оператора).
Библиографическая ссылка
Нестеров В.Н., Иванов Е.В., Лиховидов Д.В. ПОВЫШЕНИЕ ОПЕРАТИВНОСТИ РАЗВЕРТЫВАНИЯ КОМПЛЕКСОВ И СИСТЕМ ВОЕННОГО НАЗНАЧЕНИЯ // Фундаментальные исследования. 2017. № 7. С. 54-58;URL: https://fundamental-research.ru/ru/article/view?id=41584 (дата обращения: 24.03.2026).