



Аналитические материалы, представленные Счетной палатой по результатам оценки эффективности использования бюджетных ресурсов, фиксируют снижение лесосырьевого потенциала вследствие неэффективности государственной политики в области лесных отношений в РФ. В частности, отмечается сокращение общей площади, покрытой лесом, на 0,3 % при одновременном увеличении на те же 0,3 % площади спелых и перестойных древостоев, что подтверждает вывод о низкой освоенности лесов.
При этом, согласно данным Рослесхоза, в 2018 г. РФ заготовила 236 млн м3 древесины, и динамика каждый год положительная.
Одними из первоочередных резервов повышения эффективности отрасли в целом являются повышение качества древесного сырья и усовершенствование организационно-экономического сопровождения технологического процесса заготовки древесины.
Принято считать, что повышение производительности лесных машин (ЛМ) за счет использования дорогостоящих технических решений не окупается фактически с конца 1970-х гг. Это обусловлено тем, что развитие технических решений подошло к своему технологическому пределу, а большинство ЛМ, присутствующих на производственном рынке, сегодня имеют схожие конструктивные размеры, массогабаритные показатели и функциональные возможности. При этом различные производители ЛМ машин используют одни и те же комплектующие [1, 2]. Поэтому, по мнению Heikki Ovaskainen, именно оператор является главным фактором повышения эффективности лесозаготовок. Потребность в системах, помогающих операторам правильно понять ситуацию, возникла на фоне общего интереса в отрасли к технологии искусственного интеллекта, особенно к экспертным системам [3], машинному зрению [4, 5], распознаванию образов [6], представлению информации с использованием дополненной реальности [7, 8].
Главной целевой функцией системы поддержки оператора (СПО) является снижение сенсорной, когнитивной и моторной нагрузки на оператора посредством их делегирования технической системе, что наиболее актуально и ценно в режиме монотонного труда или внештатных ситуациях.
В качестве типовых функций СПО можно выделить следующие:
- информационная поддержка – реализует дополнительный информационный поток о состоянии объекта управления, осуществляет фильтрацию и агрегирование информации, обеспечивает получение дополнительной информации для интеллектуальной подсистемы;
- интеллектуальная поддержка – реализует обработку информационных сигналов, упрощает оценку и дает интерпретацию текущего состояния объекта управления, представляет прогноз развития ситуации, упрощает процесс планирования действий оператора, дает прогноз эффективности тех или иных действий оператора;
- моторная поддержка – помогает оператору осуществлять действия, связанные непосредственно с управлением объекта, компенсирует грубые ошибки оператора, сглаживает воздействия с командных органов управления в переходных режимах работы.
Разработка комплекса СПО на сегодня зачастую рассматривается как задача, играющая опциональную роль в общем процессе системного проектирования лесных машин. Так, отдельные системы операторской поддержки разрабатываются независимо от объекта применения, а затем, с определенной долей успеха, интегрируются в базовую технологическую систему.
В результате разрушается идеология создания единого проектного пространства, позволяющая обеспечить единство целеопределяющих, организационных, методических, алгоритмических и программно-технических решений.
В связи с этим возникает задача разработки методологии, позволяющей учесть специфику проектирования лесных машин, согласующуюся с принципами нисходящего системного проектирования и концепцией эргатических систем управления (ЭСУ).
Разработка методологии
Основной задачей человеко-машинного взаимодействия является оптимизация взаимодействия между человеком и технической системой, обеспечивающая большее удобство и восприимчивость технической и информационной системы к потребностям пользователей.
Достижение функционала качества возможно по пути комплексной оптимизации всех подсистем и связей эргатической системы. Это обуславливает необходимость селекции и оптимизации режимов труда оператора, оптимизации организации рабочего места оператора в соответствии требованиям эргономики, изменяющихся условий среды и технологии.
Сложность достижения функционала качества объясняется тем, что для замкнутых систем характерно существование нескольких каналов взаимных связей между отдельными независимыми объектами и существование множественных входов и выходов у рассматриваемых объектов. Наличие взаимных связей между отдельными контурами и объектами естественно усложняет статические и динамические свойства системы в целом. В результате такие системы относятся к сложным динамическим системам, в большинстве случаев являются существенно нелинейными.
В связи с вышеизложенным разработана и представлена методология проектирования и разработки СПО, рис. 1.
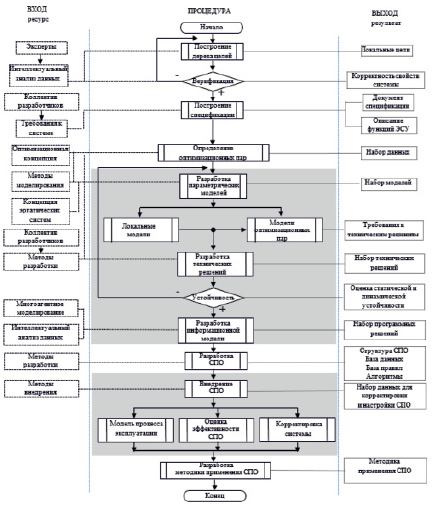
Рис. 1. Методология проектирования и разработки СПО
Данная методология реализована в идеологии средств визуального моделирования методологии и представляет собой компиляцию средств построения блок-схем и методологии INRECA [9]. Реализация концепции возможна через свою соответствующую методологическую функцию.
Последовательность действий в методологии определяется «сверху вниз», при этом в левой условной части «ВХОД» определен набор методических средств, необходимых для реализации соответствующей процедуры, а в правой условной части «ВЫХОД» обозначен перечень получаемых результатов от реализации соответствующей процедуры.
В соответствии с разработанной методологией разработка СПО включает:
- интеллектуальный анализ данных;
- методы оптимизации;
- методы моделирования;
- методы проектирования эргатических систем управления
- методы разработки;
- методы многоагентного моделирования;
- методы внедрения системы.
В методологии выделены два субпроцесса: «Построение моделей» и «Внедрение СПО».
Субпроцесс «Построение моделей» реализуется в категориях концепции организации единого проектного пространства ЭСУ и включает в себя разработку локальных моделей и оптимизацию пар «объект – регулятор», как реализацию концепции единого проектного пространства.
Субпроцесс «Внедрение СПО» представлен в виде параллельных блоков «Модель процесса эксплуатации», «Оценка эффективности СПО» и «Корректировка системы», набор данных которых является основой для разработки соответствующей методики применения СПО.
Очевидно, что при проектировании сложных систем задача создания единого проектного пространства становится практически нерешаемой в силу нечеткости описания предметной области и отсутствия четкой формализации, использования экспертами собственных ментальных моделей и наличия у них достоверных знаний о предметной области, понимания природы ее исследуемых процессов и закономерностей, возникновения случаев терминологической несогласованности, а иногда и понятийной противоречивости.
Возможным подходом в этих условиях является разработка концептуальных моделей, обеспечивающих формализацию используемых ментальных моделей для их единой и однозначной интерпретации. При этом представление концептуальной модели в виде иерархической древовидной структуры позволяет снизить трудоемкость процесса и перейти от моделирования процессов к представлению знаний предметной области.
Для создания концептуальной модели СПО может быть применен функционально-целевой подход, который позволяет найти решение через соответствующее дерево целей.
С точки зрения системного описания именно дерево целей может представить достаточно наглядное формализованное структурное описание достижения глобальной цели через иерархическую структуру локальных подцелей, которые, в свою очередь, дают основу для структурно-алгоритмического проектирования состава сложной системы в виде системы локальных агентов.
В соответствии с данным подходом следует выделить уровень глобальной цели проектирования и один или несколько уровней локальных подцелей, количество которых зависит от сложности системного описания и самой системы. Достижение цели верхнего уровня иерархии обеспечивается через совместное достижение всех целей нижнего уровня. При этом каждая локальная цель достигается посредством реализации соответствующей функции, что соответствует функционально-целевому подходу.
Задача декомпозиции глобальной цели на цели нижнего уровня иерархии достаточно нетривиальна, а ее решение на практике может быть использовано исключительно в частных категориях, что позволяет учесть специфику предметной области и избежать сложности многомерного системного описания.
Использование методов экспертных оценок позволяет учесть сложность математического описания естественного мира, с одной стороны, и при этом представить формализованную модель целей проектирования, поддающуюся алгоритмизации, с другой стороны.
Для представления структуры целей проектирования СПО на первом этапе необходимо сформировать базу экспертов, обладающих общими и специфическими компетенциями в данной предметной области, владеющих методами экспертной оценки, и осуществить их ранжирование по критерию значимости. Далее, один из экспертов, обладающий наибольшим весом в части компетентности, выступает в роли системного аналитика и представляет базовый вариант системного описания иерархии целей глобального и локального уровня. Каждый i-й эксперт, в свою очередь, с учетом своей компетенции представляет свое системное описание системы (или части системы), формируя набор альтернатив по отношению к базовому описанию.
Каждая альтернатива является продуктом субъективного представления эксперта о процессах, происходящих в системе – объекте управления, и формализации в виде соответствующей иерархии примитивов – локальных целей.
Достоверность системного описания проверяется через оценку непротиворечивости отдельных альтернатив. В случае если подмножества примитивов двух альтернатив соответствуют друг другу, можно считать такие альтернативы непротиворечивыми.
Если альтернативы противоречат друг другу, то с использованием метода «Дельфи» можно организовать следующую итерацию корректировки системного описания соответствующего противоречивого фрагмента, или же принять за истинное описание альтернативы, предложенной экспертом, имеющим больший вес значимости.
Если альтернативы не противоречат друг другу, то из двух фрагментов графа выбирается тот, который имеет больший показатель предпочтительности по выбранному критерию качества:
- наименьшее значение длины максимальной цепи графа;
- наибольший порядок;
- наименьшее среднее отклонение степеней вершин.
Таким образом, формируется финальное представление системного описания целей проектирования СПО как коллективного экспертного мнения, представленное в виде иерархической структуры.
Очевидно, что достижение глобальной цели возможно только путем полного покрытия ее целями низшего уровня иерархии, которые, в свою очередь, покрываются набором действий по их достижению. Для оценки достижимости глобальной цели целесообразно использовать методологический аппарат, апробированный для интеграции коллективных экспертных знаний в задачах разработки сценариев профессиональной ориентации и реабилитации работников [10]. В соответствии с данным подходом декомпозиция финального системного описания целей экспертами осуществляется до такого уровня, когда набор действий  по достижению каждой локальной цели (j-го примитива) становится очевидным. При этом формируется единый набор действий, как объединение соответствующих множеств:
по достижению каждой локальной цели (j-го примитива) становится очевидным. При этом формируется единый набор действий, как объединение соответствующих множеств:
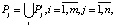
где m – число экспертов, n – число примитивов системного описания.
Объединение множеств Pj представляет полный набор действий по достижению цели:

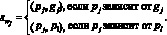
При этом связь между примитивом gi (локальной целью) и действием pj по достижению соответствующей цели из единого набора действий описывается множеством Sp пар (gi, pj):
Sp = {(gi,pj), gi∈G, pj∈Pi}, i = 1, n, j = 1,|P|.
Каждая пара (gi, pj) может рассматриваться с позиции узлов семантической сети с установленным связями и функциональными зависимостями между ними:
Представленное описание, по факту, определяет алгоритм достижения целей проектирования СПО, которое, с учетом специфики предметной области, может быть отображено следующей структурой, рис. 2.

Рис. 2. Структура целей проектирования СПО
G – повышение эффективности ЭСУ,
G1.1 – повышение производительности ЭСУ,
G1.2 – снижение затрат ЭСУ,
G1.3 – повышение безопасности ЭСУ,
g2.1 – повышение производительности оператора,
g2.2 – повышение производительности ЛМ,
g2.3 – снижение времени на технологические операции,
g2.4 – снижение расхода топлива,
g2.5 – повышение долговечности ЛМ,
g2.6 – снижение количества инцидентов (аварий),
g2.7 – снижение влияния на окружающую среду,
p3.1 – повысить качество профессиональной подготовки оператора,
p3.2 – обеспечить профессиональный отбор оператора,
p3.3 – обеспечить более высокий уровень интеграции оператора и ЛМ,
p3.4 – повысить уровень автоматизации и интеллектуализации ЛМ,
p3.5 – повысить уровень эргономики ЛМ.
Дерево целей формировалось на основе структурного анализа требований к повышению эффективности лесозаготовок с использованием текстового процессора TextAnalyst 2.01 и программной оболочки PROTÉGÉ для формирования онтологии.
Особенностью представленного дерева целей является пересечение целей третьего уровня, что обусловлено методически и технически ограниченным арсеналом средств повышения эффективности.
Заключение
Теоретически обоснована и предложена методология проектирования интеллектуальных средств оценки, контроля и управления качеством работы операторов лесозаготовительных машин, реализующая концепцию проектирования целостной неразделяемой системы «объект – регулятор», она позволяет выявить качественно новые свойства человеко-машинного взаимодействия, способствующие реализации индивидуального профессионального стиля оператора, определяющего рост эффективности получения древесного сырья.
Для создания СПО применен функционально-целевой подход, который позволяет найти решение посредством декомпозиции глобальной цели проектирования на систему локальных подцелей нижнего уровня иерархии.
Описан алгоритм синтеза сценариев проектирования СПО ЛМ на основе методов системного описания, теории системного анализа и экспертных методов принятия решений.
Описан алгоритм разработки концептуальной модели СПО через соответствующее множество ее примитивов и формирование системы пар «примитив – действие» в виде узлов семантической сети. С учетом специфики предметной области представлена трехуровневая структура целей проектирования СПО.
Библиографическая ссылка
Стешина Л.А. МЕТОДОЛОГИЯ КОМПЛЕКСНОЙ РАЗРАБОТКИ СРЕДСТВ ОПЕРАТОРСКОЙ ПОДДЕРЖКИ ЛЕСНЫХ МАШИН // Фундаментальные исследования. 2021. № 8. С. 70-75;URL: https://fundamental-research.ru/ru/article/view?id=43084 (дата обращения: 29.07.2026).
DOI: https://doi.org/10.17513/fr.43084