



Развитие аграрного сектора в Российской Федерации ставит задачи для освоения новых земель и изыскания методов увеличения урожайности сельскохозяйственных культур [1]. При посеве зерновых культур одним из основных требований, оказывающих значительное влияние на урожайность, является глубина посева семян, которая напрямую связана с глубиной предпосевной обработки почвы [2, 3]. В научных работах предложена зависимость урожайности зерновых от отклонения глубины предпосевной обработки почвы:
U = C – ΔU;
ΔU = d•σ2, (1)
где U – урожайность, ц/га;
ΔU – потери урожая, ц/га;
С и d – постоянные коэффициенты, имеющие табличные значения;
σ – среднеквадратичное отклонение глубины обработки почвы, см.
Как видно из (1), потери урожая имеют квадратичную зависимость от равномерности глубины обработки почвы.
Современные технологии предусматривают возможность совмещения операций предпосевной обработки и посева. В этом случае применяются лаповые рабочие органы [4], динамику которых можно рассматривать, как и культиваторную лапу.
Отмечено, что в существующих агротехнических требованиях по возделыванию зерновых культур отсутствуют точно сформулированные допуски на отклонения качественных показателей работы предпосевных почвообрабатывающих агрегатов. Поэтому при полевых испытаниях культиваторов основными показателями, характеризующими качество обработки почвы, являются среднее квадратичное отклонение установленной глубины – σ и коэффициент ее вариации k. Работа почвообрабатывающего агрегата считается удовлетворительной, если коэффициент вариации глубины обработки не превышает 10 % [5]. В силу неоднородности почвы и различной конструкции культиваторных рабочих органов соблюдение глубины обработки в указанных пределах практически невозможно [2], а на посевных агрегатах это непосредственно приводит к снижению урожайности [6].
Для снижения воздействия силы сопротивления почвы на глубину хода рабочего органа стали применяться культиваторы на жестких стойках. Но при этом было отмечено увеличение тягового сопротивления сельскохозяйственной машины, что существенно ограничило область применения таких машин [7]. При изучении процесса взаимодействия культиваторной лапы с почвой было отмечено, что сила сопротивления почвы вызывает вибрацию стойки рабочего органа, но при этом снижает стабилизацию глубины обработки почвы до 15 % [8, 9].
Еще одним негативным фактором, влияющим на глубину хода посевных и почвообрабатывающих машин, является неоднородность почвы на обрабатываемом поле. Земли Тюменской области подразделяются три природно-сельскохозяйственные зоны: лесостепная, южно-таежная, подтаежная. Южно-таежная зона представляет собой почвы практически однородные, поэтому их физико-механические свойства меняются незначительно. Подтаежная зона включает в себя в основном серые лесные и светло-серые лесные почвы, которым свойственна распыленность структуры и легкая заплываемость пашни после дождя. Структура почв, по сравнению с южно-таежной зоной, более разнообразна. Физико-механический состав почв различен, поэтому и к обработке почвы предъявляются различные требования. Большую часть территории области занимает лесостепная зона. В почвенном покрове лесостепи преобладают почвы гидроморфного и засоленного рядов. Они представлены лугово-черноземными и болотными почвами в комплексе с солонцами и солончаками. Для пахотного поля лесостепной зоны характерна мелкоконтурность, разбросанность отдельно обрабатываемых массивов по территории. Средний размер обособленного контура не превышает 40 га. Если в лесостепной зоне имеются крупные пахотные массивы, то в северной части пашня напоминает лоскутное одеяло. Средний размер здесь не превышает 15–20 га, а контуры имеют самую причудливую, крайне неудобную для обработки конфигурацию [10]. В силу того, что структура обрабатываемого поля неоднородна, необходимо предложить механизм, который сможет регулировать глубину обработки почвы и посева семян в зависимости от физико-механического состава почвы.
Для решения описанной задачи мы предлагаем конструкцию рабочего органа с использованием гибкого трубчатого элемента (рис. 1) [11].
Принцип работы предлагаемого рабочего органа заключается в следующем. Перед началом работы выполняется настройка заданной глубины обработки почвы. В процессе работы сила сопротивления со стороны почвы действует на лапу 1, перемещая её в обратное направление по ходу движения и выглубляя ее за счет деформации крепления лапы 2 и гибкого трубчатого элемента 3. В результате данного явления происходит уменьшение глубины обработки почвы и увеличение площади лобового сопротивления лапы. Для компенсации данного перемещения в полость гибкого трубчатого элемента через штуцер 4 подается жидкость с гидравлической системы трактора под давлением. Под действием жидкости поперечное сечение трубчатого элемента, имеющее в исходном состоянии параметры 2 а и 2 в (рис. 1, б), деформируется, принимая форму с параметрами 2а1 и 2в1 (рис. 1, в). Причем при действии жидкости выполняется условие
2а < 2а1,
2в > 2в1. (2)
Для стабилизации установленной глубины обработки почвы необходимо установить взаимосвязь между действием силы сопротивления почвы и гидравлическим давлением. Под действием силы сопротивления возникает изгибающий момент. Рассматривая S-образную стойку как консольную криволинейную балку, значение изгибающего момента можно определить, используя интеграл Мора [12]:
 (3)
(3)
где М1(z) – значение момента от единичной силы;
М(z) – значение момента от внешней нагрузки;
ЕJx – жесткость балки на изгиб.
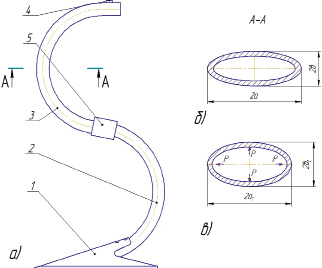
1 – лапа, 2 – крепление лапы, 3 – гибкий трубчатый элемент, 4 – штуцер, 5 – кронштейн
Рис. 1. Предлагаемый рабочий орган культиватора: а – общий вид рабочего органа; б – поперечное сечение элемента без давления; в – поперечное сечение элемента под действием давления
Для определения перемещений под действием деформации гибкого трубчатого элемента от значения гидравлического давления используется полубезмоментная теория расчета оболочек [13]. Результаты, полученные при математическом исследовании, представлены в научной работе одного из авторов [11].
Для подтверждения научной гипотезы и теоретических результатов исследований была разработана установка для проведения полевых испытаний (рис. 2).
Экспериментальная установка, использованная при исследованиях, навешивается на трактор и агрегат выполняет культивирование почвы. На раму 1 жестко закрепляются прямоугольные направляющие 2, вдоль которых перемещается кронштейн 3 (динамометрическая тележка). Рабочий орган 4 крепится к передвижной тележке 3, которая при помощи динамометра 6 ограничена в продольном перемещении по ходу трактора. Гидравлическая система трактора соединена с полостью упругого элемента посредством шлангов высокого давления. В данную магистраль установлен манометр 5.
В качестве объектов исследований выступали следующие показатели:
– тяговое сопротивление агрегата;
– среднеквадратичное отклонение глубины обработки почвы;
– коэффициент вариации глубины обработки почвы.
Для исследований был изготовлен опытный образец гибкого трубчатого элемента с параметрами, удовлетворяющими условиям прочности при изгибе: центральный угол – 170 °, радиус центральной линии 230 мм, размеры осей эллипса поперечного сечения 2а = 30 мм, 2в = 60 мм, толщина стенки сечения h = 3,5 мм. Эксперимент проводился в пятикратном повторении на глубине обработки от 2 до 6 см. Агрегат работал с предлагаемым рабочим органом в следующих режимах: без подачи давления в полость гибкого трубчатого элемента и с подачей давления от 1 до 4 МПа. Полученные результаты обрабатывались в математическом редакторе MathCAD, а графические зависимости представлены на рис. 3.
Как видно из полученных зависимостей, коэффициент вариации возрастает с увеличением глубины обработки. Это связано с тем, что прирост силы сопротивления почвы, действующей на культиваторную лапу, приводит к увеличению изгибающего момента. Согласно выражению 2 это приводит к увеличению перемещения лапы в вертикальной плоскости.
При работе рабочего органа без давления коэффициент вариации более 10 %, что характеризует изменчивость вариационного ряда как среднюю. Согласно пороговым значениям [5], работа культиватора считается удовлетворительной, если значение коэффициента не превышает 10 %. Соответственно, собственной жесткости экспериментального образца недостаточно даже при глубине обработки 3 см.
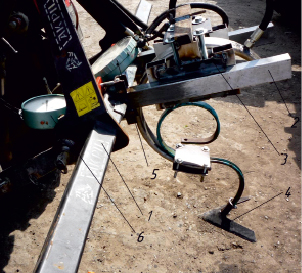
Рис. 2. Общий вид экспериментальной установки: 1 – рама; 2 – направляющие; 3 – передвижной кронштейн; 4 – рабочий орган; 5 – манометр; 6 – динамометр
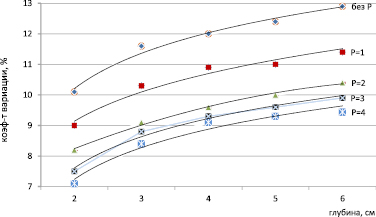
Рис. 3. Зависимость коэффициента вариации от значения давления
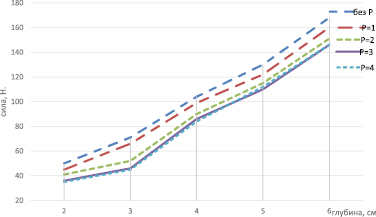
Рис. 4. Зависимости силы сопротивления от значения давления
При подаче жидкости под давлением в полость гибкого трубчатого элемента изгибная жесткость последнего начинает увеличиваться и, соответственно, перемещение лапы уменьшаться. Но необходимо учитывать, что с увеличением жесткости элемента уменьшается амплитуда и частота колебаний стойки, влияющих на тяговое сопротивление агрегата. На рис. 4 представлены зависимости силы сопротивления почвы при движении агрегата со скоростью 3,6 м/с.
Полученные результаты экспериментальных исследований показывают, что с увеличением глубины обработки почвы возрастает и тяговое сопротивление. Причем из представленных зависимостей следует, что увеличение жесткости стойки за счет гидравлического давления в полости гибкого трубчатого элемента приводит к снижению тягового сопротивления. Но необходимо отметить, что при увеличении давления с 3 до 4 МПа тяговое сопротивление изменилось незначительно.
По результатам проведенных исследований можно утверждать, что предлагаемая конструкция стойки культиваторной лапы с изменяемой жесткостью в комплексе со следящей системой [14] позволит выдерживать установленную глубину обработки почв с различными физико-механическими свойствами. При создании гидравлического давления в полости гибкого трубчатого элемента в диапазоне 2–3 МПа и глубине обработки почвы 5 см, тяговое усилие на 1 лапу составило 115 и 110 Н соответственно, а коэффициент вариации глубины обработки почвы не превышает 10 %.
Библиографическая ссылка
Кокошин С.Н., Созонов С.М. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ КУЛЬТИВАТОРНЫХ СТОЕК С ИЗМЕНЯЕМОЙ ЖЕСТКОСТЬЮ // Фундаментальные исследования. 2017. № 11-1. С. 82-86;URL: https://fundamental-research.ru/ru/article/view?id=41902 (дата обращения: 16.07.2026).