



Среди основных задач автоматизации строительно-дорожных машин наиболее актуальной является задача управления пространственным положением их рабочего органа (РО). Это обусловлено тем, что во многих технологиях качество выполнения планировочных работ определяется тем, насколько точно РО перемещается по заданной траектории [1, 2].
Для многоковшового роторного экскаватора (в дальнейшем – траншеекопателя) задача управления положением РО (ротора) в автоматическом режиме может быть решена путем создания системы автоматического регулирования (САР) положения РО [5, 9], функциональная схема которой представлена на рис. 1.
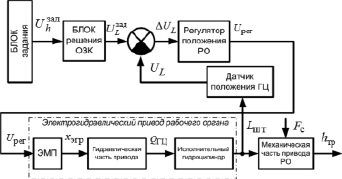
Рис. 1. Функциональная схема САР положения ротора траншеекопателя
С блока задания параметров системы автоматического управления траншеекопателем на вход подсистемы автоматического регулирования положения ротора траншеекопателя (САР РО) поступает сигнал  , соответствующий заданному значению заглубления РО машины. Учитывая сложности, возникающие при прямом измерении величины заглубления ротора по отношению к поверхности траншеи hтр, целесообразно определение этого параметра проводить косвенным путем по величине выдвижения штока управляющего гидроцилиндра (ГЦ) Lшт, а контур регулирования формировать с обратной связью по положению штока ГЦ привода ротора. Таким образом, связь между управляющим параметром
, соответствующий заданному значению заглубления РО машины. Учитывая сложности, возникающие при прямом измерении величины заглубления ротора по отношению к поверхности траншеи hтр, целесообразно определение этого параметра проводить косвенным путем по величине выдвижения штока управляющего гидроцилиндра (ГЦ) Lшт, а контур регулирования формировать с обратной связью по положению штока ГЦ привода ротора. Таким образом, связь между управляющим параметром  , соответствующим заданному значению выдвижения штока ГЦ, и параметром
, соответствующим заданному значению выдвижения штока ГЦ, и параметром  рассчитывается в блоке решения обратной задачи кинематики (ОЗК).
рассчитывается в блоке решения обратной задачи кинематики (ОЗК).
Непосредственно контур регулирования включает в себя регулятор положения РО, на вход которого поступает сигнал ошибки  , где UL – сигнал с датчика положения штока ГЦ, и электрогидромеханический привод РО. Связь между электронной частью САР и гидравлической частью привода осуществляется посредством электромеханического преобразователя ЭМП, входным сигналом которого является регулирующее воздействие со стороны регулятора Uрег, а выходным сигналом – смещение золотника электрогидрораспределителя хэгр. Гидравлическая часть привода формирует расход QГЦ, который поступает в исполнительный ГЦ, в результате чего ГЦ получает смещение на величину Lшт [3].
, где UL – сигнал с датчика положения штока ГЦ, и электрогидромеханический привод РО. Связь между электронной частью САР и гидравлической частью привода осуществляется посредством электромеханического преобразователя ЭМП, входным сигналом которого является регулирующее воздействие со стороны регулятора Uрег, а выходным сигналом – смещение золотника электрогидрораспределителя хэгр. Гидравлическая часть привода формирует расход QГЦ, который поступает в исполнительный ГЦ, в результате чего ГЦ получает смещение на величину Lшт [3].
Кинематический анализ механизма привода рабочего органа траншеекопателя
Механическая часть привода РО одного из типов траншеекопателей представляет собой рычажный механизм с вращающимся ротором, показанный на рис. 2, который воспринимает усилие сопротивления со стороны срезаемого грунта [4].
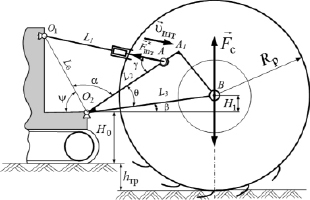
Рис. 2. Кинематика механической части привода РО траншеекопателя
Кинематика механической части такого привода РО относится к связанным системам, имеющим силовую связь между РО и базовой машиной через гидравлический механизм. Ротор траншеекопателя при этом имеет принудительное заглубление и подъем. При этом изменение величины заглубления ротора при воздействии на него через исполнительный гидроцилиндр гидравлического привода зависит от кинематической характеристики механизма подъема. Кроме того, кинематические свойства механизма влияют на кинематическую точность позиционирования ротора [8].
Проведем кинематический анализ механической части привода РО траншеекопателя (см. рис. 2). Для этого установим зависимость между перемещением штока ГЦ Lшт и величиной заглубления ротора hтр.
Величина заглубления определится как
 , (1)
, (1)
где H0 – расстояние между точкой O2 крепления рычажного механизма ротора и поверхностью, по которой передвигается машина; H1 – расстояние по вертикали между точкой O2 и точкой В на оси вращения ротора; Rp – радиус ротора. Отрицательное значение величины hтр в выражении (1) говорит о заглублении ротора. Переменную составляющую выражения (1) H1 определим из рассмотрения треугольников  и
и  :
:
 ,
,
где  и
и  ,
,
Lб – базовое конструктивное расстояние между точками O1 и O2; L2 – расстояние между точками O2 и А1 жесткой рамы; L3 – расстояние между точками O2 и B жесткой рамы механизма; L1 – расстояние между точками O1 и A, определяемое как
 , (2)
, (2)
где L0 – неизменяемое (минимальное) конструктивное расстояние между точками O1 и A.
Окончательно с учетом некоторых преобразований получим зависимость  , представляющую решение прямой задачи кинематики, в виде
, представляющую решение прямой задачи кинематики, в виде
 . (3)
. (3)
Выражение (3) может быть принято для математического описания механической части привода РО (см. рис. 1).
В основу решения обратной задачи кинематики Lшт = f(hтр) положены следующие выражения:
 ,
,  ,
,  ,
,
 ,
,  .
.
Решив совместно эти уравнения, получим решение ОЗК для механической части привода РО траншеекопателя:
 . (4)
. (4)
Графическая интерпретация выражения (4) приведена на рис. 3. При расчете были приняты следующие параметры: Lб = 2 м; L2 = 0,7 м; L3 = 2,5 м; H0 = 0,5 м; α0 = 60 °; θ = 55°; Rp = 1,5 м.
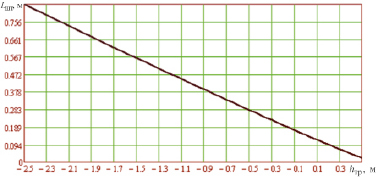
Рис. 3. График зависимости перемещения штока управляющего ГЦ от величины заглубления РО траншеекопателя
Представленная на рис. 3 графическая зависимость дает возможность оценить правильность выбора кинематических параметров механического привода, для которого должно выполняться условие [10]
 , (5)
, (5)
где  – величина хода поршня управляющего гидроцилиндра,
– величина хода поршня управляющего гидроцилиндра,  соответствует поднятому РО (транспортное положение) и
соответствует поднятому РО (транспортное положение) и  – положению РО при максимальном заглублении. Условие (5) позволяет подобрать или рассчитать управляющий гидроцилиндр привода РО, у которого ход поршня конструктивно не может превышать некоторого значения
– положению РО при максимальном заглублении. Условие (5) позволяет подобрать или рассчитать управляющий гидроцилиндр привода РО, у которого ход поршня конструктивно не может превышать некоторого значения  , где
, где  – габаритные размеры ГЦ при полностью втянутом штоке. Для принятых параметров механизма получим: Lхода = 0,83 м;
– габаритные размеры ГЦ при полностью втянутом штоке. Для принятых параметров механизма получим: Lхода = 0,83 м;  1,422 м, а выражение (5) выполняется при
1,422 м, а выражение (5) выполняется при  0,583.
0,583.
Для оценки кинематической погрешности позиционирования РО по величине заглубления hтр проведем разложение функции (3) в ряд Тейлора [6, 7]
 .
.
После некоторых преобразований получим выражение вида:

 . (6)
. (6)
На рис. 4 приведены зависимости Δhтр = f(hтр), построенные при различных значениях ΔLшт. В выражении (6) ΔLшт представляет собой погрешность перемещения штока управляющего гидроцилиндра при работе САР положения ротора траншеекопателя.
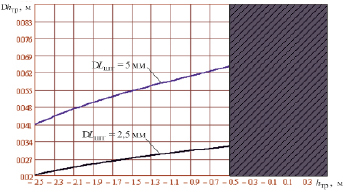
Рис. 4. Графики кинематической погрешности заглубления РО траншеекопателя Δhтр = f(hтр)
Учитывая, что управление перемещением РО в автоматическом режиме начинается, как правило, с величин заглубления hтр = –0,5 м и ниже, максимальная теоретическая погрешность заглубления ротора не будет превышать величин

Определение силового воздействия рабочего органа на гидравлический привод РО
Для оценки силового воздействия РО на гидравлический привод найдем приведенную силу  , действующую на шток управляющего гидроцилиндра. Из уравнения баланса мощностей, развиваемых силами и моментами сил, приложенными в различных точках звеньев и совершающих поступательное или сложное плоское движение [7], получим
, действующую на шток управляющего гидроцилиндра. Из уравнения баланса мощностей, развиваемых силами и моментами сил, приложенными в различных точках звеньев и совершающих поступательное или сложное плоское движение [7], получим
 (7)
(7)
где Fc – суммарная сила, действующая на точку B механизма перемещения РО (см. рис. 2). При записи баланса мощностей были учтены только силы, действующие на ротор: сила тяжести ротора с нагруженными ковшами и реакции со стороны срезаемого грунта. Силами тяжести и моментами сил жесткой конструкции О2А1В (см. рис. 2) в данном случае пренебрегли.
Для определения соотношения  , входящего в выражения (7), представим производную
, входящего в выражения (7), представим производную  в следующем виде:
в следующем виде:
 (8)
(8)
откуда согласно (6)

 .
.
Заключение
Проведенный анализ кинематических параметров одной из конструкций механизма привода РО траншеекопателя показал, что при построении САР РО следует учитывать кинематику механизма привода. С целью минимизации погрешности регулирования РО по величине заглубления может потребоваться проведение оптимизации размеров рычажного механизма и расположения точек крепления конструкции к гусеничной машине. Полученные аналитические зависимости могут лечь в основу проведения такой процедуры.
Анализ выражения (8) (см. рис. 4) показывает, что при постоянной скорости перемещения штока управляющего ГЦ скорость вертикального перемещения РО в рабочем диапазоне заглублений будет изменяться примерно в 1,5 раза, что может потребовать введения в систему управления контура регулирования скорости. С другой стороны, силовой анализ показал, что аналогичным образом будет изменяться приведенная к штоку ГЦ сила  , что также отразится на динамике привода. Кроме того, выражения (7) и (8) могут быть использованы при математическом описании работы автоматизированного траншеекопателя.
, что также отразится на динамике привода. Кроме того, выражения (7) и (8) могут быть использованы при математическом описании работы автоматизированного траншеекопателя.
Библиографическая ссылка
Карташова Т.П., Лазариди К.М., Шошиашвили М.Э., Шошиашвили И.С. КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНШЕЕКОПАТЕЛЕМ // Фундаментальные исследования. 2017. № 4-2. С. 257-261;URL: https://fundamental-research.ru/ru/article/view?id=41470 (дата обращения: 07.07.2026).