



В данной статье описывается концепция динамического метода передачи навигационных данных в системах GNSS (англ. Global Navigation Satellite System – Глобальная Навигационная Спутниковая Система) мониторинга для морского транспорта. Эффективность полученных результатов доказывается на основе значений двух коэффициентов: точности трека и уменьшения трафика. Целью исследования являлось сохранение максимально возможного количества информации в треке объекта мониторинга, при его обработке с помощью алгоритмов фильтрации навигационных данных.
Динамический и статические алгоритмы передачи данных
Одной из проблем, возникающих в области спутникового GNSS мониторинга для морского транспорта, является проблема чрезмерного количества интернет-трафика, затрачиваемого на передачу данных от трекера до сервера системы мониторинга. Единственным способом обеспечить непрерывный процесс передачи данных в реальном времени является использование спутникового интернета [1], который, как правило, имеет высокую стоимость. Рассмотрим в качестве примера наиболее дешёвый тариф для системы Иридиум OpenPort – скоростной глобальной спутниковой системы связи, созданной для морского судоходства. Её цена за мегабайт трафика при скорости 64 Кбит/с – 14,57 USD. Как видно, расходы достаточно велики; требуется фильтрация данных для сокращения количества передаваемой информации.
Существующие решения в данной области основываются на методах, обеспечивающих периодическую трансляцию навигационных данных от GNSS-трекера, размещённого на транспортном средстве, до сервера системы спутникового мониторинга. При этом частота передачи данных зависит от одного из стандартных используемых методов:
1. Временной алгоритм. Передача навигационной информации через определённый промежуток времени. Примеры применения метода: спутниковый мониторинг автотранспорта и учет топлива СКАУТ (T = 5, 10 с) [2], спутниковая система слежения за мобильными объектами «Вояджер» (T = 5 с) [3].
2. Периодическая передача данных на сервер в зависимости от расстояния, пройденного объектом мониторинга. Например, через каждые 100 метров. Пример реализации алгоритма: персональный GPS-трекер NAVIXY S10 [4].
3. Передача данных при смене курса. Передача информации производится при значении разницы курсов между точками трека, больше заданной. Пример реализации: GPS / ГЛОНАСС-трекер GlobalSat GTR-128 [5].
Перечисленные выше методы, называемые статическими методами передачи данных, поскольку они имеют фиксированные значения параметров (периода передачи информации, расстояния между точками трека, разницы курсов), не учитывают динамический характер движения транспортных средств. Таким образом, обработка поступающих от GNSS-трекера данных при помощи указанных методов приведёт к тому, что внесённые изменения одинаковым образом повлияют на каждый участок трека. Это неэффективно, поскольку для каждой задачи требуются свои параметры фильтрации; невозможно подобрать единое значение указанных параметров для всех возможных ситуаций.
Для решения данной проблемы предлагается использовать разработанный метод динамической передачи данных, задача которого – минимизировать сумму потраченного трафика при сохранении максимального количества информации о передвижении морского транспорта в треке.
Абстрактная функция, отражающая основную идею алгоритма, имеет вид
Ti = f(ui, U),
где Ti – один из доступных периодов передачи навигационной информации; ui – соответствующий этому периоду элемент из массива скоростей; U – скорость объекта на момент получения навигационных данных.
Динамический метод основан на использовании различных периодов передачи навигационной информации для различной скорости движения транспортного средства, причём таким образом, чтобы потеря навигационной информации была минимальной. То есть вместо использования одного, жестко зафиксированного значения T (как это делается во временном алгоритме), применяется плавающий период передачи данных, зависящий от значения скорости транспортного средства. Поскольку найти точное соответствие скорости и периода не представляется возможным, было принято решение разбить диапазон скоростей для морского транспорта (0–78 км/ч) на части и определить для каждого промежутка скоростей соответствующее ему значение T.
Разделим весь возможный диапазон скоростей на некоторые промежутки ui=1,2,3,…n, где n – номер диапазона. Каждый промежуток содержит две переменные ui = {ustart; uend}, где ustart – стартовое значение диапазона; uend – конечное значение диапазона. Полученные диапазоны имеют вид: u1, u2, u3, …, un = {0 км/ч; 2 км/ч}, {2 км/ч; 4 км/ч}, {4 км/ч; 6 км/ч}, …, {n км/ч; n + 2 км/ч}. Для каждого из этих промежутков ui необходимо найти соответствующий им период передачи данных Ti, что и являлось основной задачей при разработке динамического метода.
Вычисление периодов передачи данных производилось посредством анализа треков морского транспорта. В каждый момент времени у транспортного средства существует какая-либо скорость U. Для примера, рассмотрим вычисление скорости объекта мониторинга при его движении от точки p1 к p2. Необходимо проверить, соответствует ли данное значение одному из диапазонов в соответствии с условием
ustart ≤ U ≤ uend,
где ustart – стартовое значение диапазона; uend – конечное значение диапазона.
Номер данного диапазона (обозначим его u1 = {0 км/ч; 2 км/ч}) запоминается. Затем требуется найти значение скорости при движении от точки p2 к p3, после чего скорость транспорта вновь проверяется. Вычисления продолжаются до тех пор, пока не выполнится условие U ∉ u1. Первая и последняя точки, входящие в диапазон u1, запоминаются для вычисления периода передачи данных.
Каждая пара навигационных координат связана со временем их получения ti. Таким образом, период передачи данных для выбранного диапазона можно найти как
Ti = tn – t0,
где tn – временная метка последней точки в полученной последовательности; t0 – временная метка первой точки.
Алгоритм определения периодов передачи информации работает до тех пор, пока последняя точка в треке не будет достигнута.
При завершении работы данного алгоритма имеем определённое количество периодов передачи данных для каждого диапазона. Таким образом, чтобы получить результирующее значение периода передачи навигационной информации для некоторого диапазона скоростей ui, необходимо найти среднее значение  от множества полученных данных:
от множества полученных данных:

где n – номер соответствующего значения Ti; avg – функция нахождения среднего от последовательности чисел.
Смысл указанных действий можно понять по аналогии с математической прямой. Существует бесконечное количество точек, лежащих на прямой, но с точки зрения количества полезной информации – важны только первая и последняя точки. В основе алгоритма изначально лежит предположение о том, что весь трек объекта мониторинга состоит из последовательности прямых линий, и его задача – разбить этот трек на отдельные отрезки такой длины, удаление точек в которых бы не привело к существенной потере информации. Длину данных отрезков регулирует значение периода передачи данных, зависящее от скорости движения транспортного средства.
Рис. 1 демонстрирует итоговую графическую характеристику динамического алгоритма для морского транспорта, обработанную с помощью фильтра Калмана. По оси абсцисс отложены диапазоны скоростей (по 2 км/ч в каждом), по оси ординат – периоды передачи данных в секундах, соответствующие той или иной скорости движения морского транспорта. Характеристика имеет несколько пиковых значений. В соответствии с рассмотренными треками на данных скоростях морской транспорт придерживается постоянного курса и частая передача данных нецелесообразна.
Для оценки эффективности применения динамического метода передачи данных и для сравнения его со статическими методами были разработаны коэффициенты эффективности: коэффициент точности метода и коэффициент уменьшения трафика.
Коэффициент точности Kpath оценивает количество полезной информации, оставшейся в треке при использовании одного из методов передачи данных. Под полезной информацией понимается отношение количества точек высокой точности трека Pin к общему количеству точек трека Pcount.

Точность какой-либо точки определяется как степень соответствия этой точки геометрической линии исходного трека, поскольку при фильтрации данных любым из упомянутых ранее методов исходный трек искажается вплоть до его полного несоответствия реальной траектории движения транспортного средства.
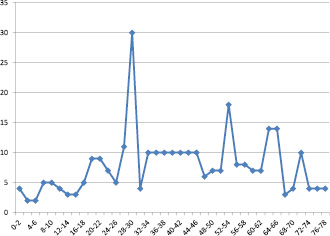
Рис. 1. Сравнение методов по среднему коэффициенту точности, выраженных в процентах от среднего Kpath исходных треков (для морского транспорта)
Для вычисления коэффициента уменьшения трафика первоначально необходимо вычислить общее количество потраченного трафика Mi при использовании какого-либо из анализируемых методов. Длина одной навигационной посылки обычно занимает около 40 байт. Таким образом, общее количество точек трека Pcount, помноженное на длину посылки и разделённое на тысячу, даст общее количество потраченного трафика в килобайтах.
Коэффициент уменьшения трафика позволяет оценить, во сколько раз меньше трафика требуется потратить по сравнению с затратами на исходные треки. Соответственно, M – количество потраченного трафика в исходных треках; Mi – количество потраченного трафика при использовании анализируемого метода.

где mi – коэффициент уменьшения трафика; i – индекс метода.
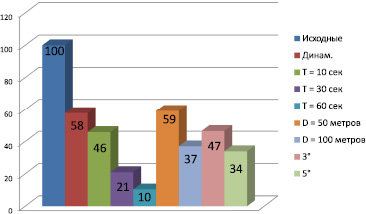
Рис. 2. Сравнение методов по среднему коэффициенту точности, выраженному в процентах от среднего Kpath исходных треков (для морского транспорта). Столбец «Исходные» – соответственно обозначает исходные треки, «Динам.» – динамический метод передачи данных. Далее обозначен временной алгоритм с периодами 10, 30, 60 секунд; передача информации при заданной дистанции между точками трека, равной 50 и 100 метров; передача данных при разнице курсов больше или равной 3°, 5°

Рис. 3. Сравнение методов по среднему коэффициенту уменьшения трафика
Выводы
На рис. 2 представлены средние значения коэффициентов точности для статических методов и разработанного динамического метода передачи данных, выраженные в процентах от среднего коэффициента точности исходных треков. В результате проведённого анализа треков морского транспорта, при использовании динамического метода, удалось добиться сохранения информации в обработанном треке в количестве 58 % от исходного трека, уступая только передаче данных через каждые 50 метров (59 %).
На рис. 3 представлено сравнение методов по коэффициенту уменьшения трафика. Как видно, разработанный динамический метод позволяет сократить количество трафика в 4,9 раз по сравнению с затратами на исходные треки. Превосходящие его по данному коэффициенту методы имеют значительно меньший коэффициент точности (Kpath = 10 % при T = 60 с; Kpath = 21 % при T = 30 с; Kpath = 46 % при T = 10 с).
Таким образом, разработанный метод позволил существенно уменьшить количество передаваемого трафика при сохранении оптимального качества навигационной информации.
Библиографическая ссылка
Игнатюк В.А., Сметанин С.И., Евстифеев А.А. РАЗРАБОТКА ДИНАМИЧЕСКОГО АЛГОРИТМА ПЕРЕДАЧИ ДАННЫХ ДЛЯ GNSS-МОНИТОРИНГА МОРСКОГО ТРАНСПОРТА // Фундаментальные исследования. 2016. № 5-2. С. 242-246;URL: https://fundamental-research.ru/ru/article/view?id=40282 (дата обращения: 21.07.2026).