



Целью данной работы является представление концепций и рассмотрение передового опыта в области машиностроения, а также демонстрация образцов значительных работ в этой области.
В настоящее время существует большое разнообразие параллельных механизмов [1, 3]. В зависимости от архитектуры они могут быть разделены на группы, которые отличаются по типу связи между неподвижной базовой платформой и рабочим органом. Особый интерес представляют манипуляторы с гибкими звеньями, которые обладают такими полезными качествами, как большое рабочее пространство, большая перемещаемая масса, быстрое развертывание, низкое взаимодействие с пользователем, что может быть полезно для тактильных устройств. Рабочий орган приводится в действие набором гибких звеньев, роль которых могут выполнять тросы. К тому же данный класс оборудования иногда называется тросовым параллельным манипулятором.
Несмотря на их многочисленные преимущества, есть несколько проблем, связанных с гибкими звеньями манипуляторов. Гибкие звенья манипуляторов способны только тянуть, но не могут толкать. Поэтому рабочий орган должен поддерживаться всеми звеньями одновременно, не допуская их провисания. В результате моделирование и методы анализа, которые были разработаны для обычных манипуляторов с жесткими связями, не могут быть непосредственно применены к данному типу механизмов. Однако количество возможных применений параллельных манипуляторов с гибкими звеньями с каждым годом увеличивается.
Классификация параллельных манипуляторов с гибкими звеньями
Классификацию параллельных механизмов можно получить, рассматривая количество степеней свободы рабочего органа n и числа гибких звеньев m [2].
Если m < n + 1, то манипулятор называется ограниченным, а движение рабочего органа не может полностью контролироваться (рис. 1, а).
Если m = n + 1, то манипулятор называется вполне ограниченным. Движения рабочего органа могут полностью контролироваться с этим минимальным количеством звеньев (рис. 1, б, в, г).
Если m > n + 1, то число кабелей превышает число степеней свободы, и манипулятор, как говорят, с избыточными ограничениями (рис. 1, д, е).
Для избыточных тросовых параллельных механизмов движение рабочего органа может полностью контролироваться. Избыточность также может быть использована для создания отказоустойчивых систем.
Из-за многочисленных положительных качеств манипуляторы с гибкими звеньями используются повсюду, начиная медицины и заканчивая военной промышленностью. Манипуляторы используются в таких областях, как строительство, моделирование транспортных средств, спасательные операции, погрузо-разгрузочные операции, радиотелескопы, реабилитация. Далее рассмотрим краткое описание наиболее важных работ.
Одним из первых созданных тросовых параллельных манипуляторов был NIST Robocrane (рис. 2). Он был разработан Джеймсом С. Альбусом и его командой из Национального института стандартов и технологий. Манипулятор использует перевернутую платформу Стюарта, мобильная платформа с 6 ногами, где каждая из шести ножек была заменена на трос [5]. NIST RoboCrane имеет возможность поднимать и точно манипулировать тяжелые грузы на большие расстояния, во всех шести степенях свободы. Лабораторные испытания RoboCrane продемонстрировали способность управлять такими инструментами, как пилы, шлифовальные машины и сварочные горелки, и точно позиционировать тяжелые предметы, такие как стальные балки и чугунные трубы.
В 2003 году американским изобретателем Джеймсом Томпсоном из Рошароне (штат Техас) и Рональдом Густавом Пресвудом из Хьюстона (штат Техас) было предложено несколько схем параллельных манипуляторов с гибкими звеньями [6] (одна из которых представлена на рис. 3), предназначенных для перемещения грузов.


а б в



г д е
Рис. 1. Классификация параллельных манипуляторов

Рис. 2. NIST Robocrane
Как видно из рис. 3, манипулятор состоит из четырех вертикальных колонн 1, возле основания каждой из которых размещены барабаны 4, предназначенные для намотки (или смотки) одних концов гибких звеньев 2. Другие концы гибких звеньев 2, проходящие через удерживающие элементы 5, соединяются со схватом 3. Направление вращения, а также скорость вращения барабанов 4 задается блоком управления 6. Таким образом, меняя длины гибких звеньев 2 путем их намотки (смотки) на барабаны 4 возможно изменять положение схвата 3 в пространстве рабочей зоны параллельного манипулятора, которая ограничена вертикальными колонами 1 [4].
В работе [7] предложена концепция параллельного манипулятора FLOAT, схематично представленного на рис. 4. Как видно из рис. 4, кинематика данного манипулятора схожа с вышерассмотренной кинематикой параллельного манипулятора на основе гибких звеньев. Данная роботизированная система FLOAT разрабатывалась в качестве лечебного устройства для выполнения различных терапевтических упражнений. FLOAT позволяет не только поддерживать вес пользователя во время произвольных движений, но она также может помочь инициировать движение и отслеживать траекторию центра масс.
На рис. 5 представлен манипулятор, разработанный для реабилитации плечевого и локтевого движения. Развитие этого роботизированного устройства оправдывается большим количеством людей с проблемами плеча. Эти проблемы обусловлены инсультом, полиомиелитом, артритом. Устройство может применяться в физиотерапии. Разработанный на основе параллельной структуры манипулятор образован четырьмя кабелями, которые соединяют стационарную платформу и мобильную платформу, что позволяет реализовать основные движения плеча. Таким образом, эта структура имеет необходимые требования, которые должны применяться в клиниках физической терапии, больницы и дома, облегчая и оптимизируя работу физиотерапевта, а также предоставляя информацию об эволюции пациента.
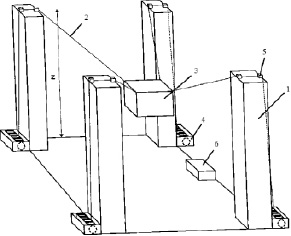
Рис. 3. Параллельный манипулятор с гибкими звеньями
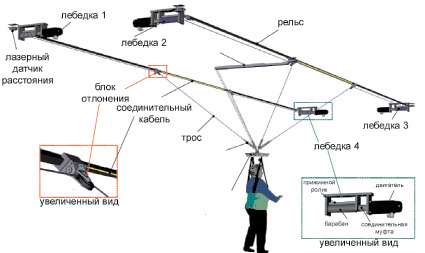
Рис. 4. Концепция системы подготовки FLOAT



Рис. 5. Экспериментальная последовательность движения
Таким образом, учитывая тенденцию развития, весьма перспективным представляется развитие данного класса оборудования в первую очередь в направлении повышения степени автоматизации при выполнении сложных трудоемких операций механической обработки, сборки, сварки, погрузо-разгрузочных работ, а также упрощение взаимодействия с пользователем для тактильных устройств.
Вывод
Большой интерес исследователей к манипуляторам с гибкими звеньями в последние несколько десятилетий подтверждает их эффективность и целесообразность дальнейшего их развития.
Перспективы развития данного класса оборудования будут определяться расширением спектра решаемых задач, в первую очередь в направлении автоматизации операций, обладающих способностью к автономному решению как можно большего числа задач.
Ввиду многообразия возлагаемых на разрабатываемые роботехнические системы задач, сочетающих в себе значительную зону обслуживания и большие массогабаритные показатели перемещаемого груза, определяется целесообразность воплощения в перспективе различных конструктивных решений.
Работа выполнена в рамках гранта (проекта) РФФИ 14-08-31484.
Библиографическая ссылка
Алепко А.В., Яковенко Д.М., Дубовсков В.В. МЕХАНИЗМЫ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ: ОБЗОР СОВРЕМЕННОГО СОСТОЯНИЯ, ОБЛАСТЬ ПРИМЕНЕНИЯ МАНИПУЛЯТОРОВ В ПРОМЫШЛЕННОСТИ И АНАЛИЗ ПЕРСПЕКТИВ РАЗВИТИЯ // Фундаментальные исследования. 2016. № 2-1. С. 13-17;URL: https://fundamental-research.ru/ru/article/view?id=39871 (дата обращения: 02.08.2026).