



В последние годы для создания высокоэффективных роботов, в том числе и малогабаритных летательных аппаратов, все чаще используются результаты исследования движения реальных биологических прототипов. Имитация и копирование принципов поведения живых организмов позволяет создавать мобильные устройства, обладающие уникальными свойствами, которые находят конкретное практическое применение [1–12]. Создание нового класса небольших прыгающе-летающих роботов, имитирующих движение насекомых, открывает новые возможности для создания средств скрытого мониторинга окружающей среды и разведки местности с использованием диагностической и информационной микро- фото- или видеоаппаратуры. Прыгающе-летающие роботы, получившие название инсектоптеры, обладают рядом достоинств, таких как малая масса при существенной массе полезной нагрузки, компактность и маневренность [1–3]. Для проектирования таких систем необходима информация о силах, возникающих при взаимодействии крыльев с потоком воздуха, а также многих других параметрах, определение которых теоретическими методами представляет значительные трудности, поэтому эти данные, так необходимые при разработке и создании роботов, удобно получить на основе экспериментальных исследований, позволяющих определить тяговую и подъемную силы машущего крыла, энергопотребление электроприводов и многое другое.
Описание экспериментального стенда
Для изучения параметров малогабаритных летательных объектов разработан и изготовлен многофункциональный стенд, схема которого представлена на рис. 1.
На рис. 1 приняты следующие обозначения основных элементов механизма: 1 – основание; 2 – стойка; 3 – энкодер; 4 – акселерометр; 5 – стержни; 6 – кронштейн для крепления робота; 7 – сервомашинка; 8 – блок электроники; 9 – аккумуляторы.
Стенд работает следующим образом. На кронштейн 6 закрепляется исследуемый объект. Посредством сервопривода 7 относительно оси Oz осуществляется поворот кронштейна с закрепленным роботом на необходимый для эксперимента угол. После проведения данной настройки угла производится включение электроприводов машущего крыла инсектоптера, которая заставляет его вращаться вокруг оси Oy. Углы поворота в плоскостях yOz и xOz измеряются с помощью акселерометра 4 и энкодера 3 соответственно. При этом можно определить скорость движения робота по окружности или силы тяги и подъемной силы, ток потребляемый приводами робота, напряжение питания и многое другое.
Расчетная схема для определения тягового усилия представлена на рис. 2.
Здесь приняты следующие обозначения: φ1 – угол поворота вокруг оси Oz; φ2 – угол поворота вокруг оси Ox; φ3 – угол поворота вокруг оси Oy; l1, l2 – длины звеньев (плечи);  – сила тяжести робота с кронштейном;
– сила тяжести робота с кронштейном;  – сила тяжести противовеса.
– сила тяжести противовеса.
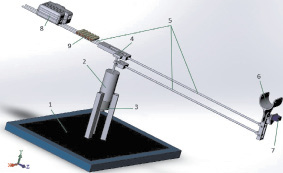
Рис. 1. 3D-модель стенда (общий вид)
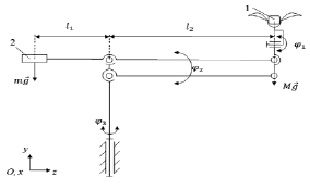
Рис. 2. Расчетная схема определения тягового усилия: 1 – инсектоптер; 2 – противовес
Для проведения экспериментов используется прецизионный измеритель силы, фото-строботахометр, позволяющий измерять частоту колебаний крыльев.
Методика проводимых измерений
С помощью данного стенда проведен эксперимент, в результате которого определена зависимость тягового усилия инсектоптера от частоты взмаха крыла. Методика эксперимента заключается в следующем. Махолет закрепляется в кронштейне и предварительно поворачивается на угол φ1 = 90° так, чтобы исследуемый объект располагался вертикально в плоскости yOz.
Робот уравновешивается такой массой m, чтобы стержни 5 находились горизонтально, при этом должно выполняться равенство
mgl1 = Mgl2,
где l1 и l2 – длины стержней; М – масса робота; g – ускорение свободного падения. Фото-строботахометр располагается над крылом закрепленного робота на таком уровне, чтобы фиксировать количество оборотов реверсивного движения крыла. Выполнив перечисленные предварительные работы, включается тяга машущего крыла и измеряются необходимые переменные, а именно: количество махов n (об./мин) крыла с помощью фото-строботахометра; нормальная сила реакции N (Н), фиксируется прецизионным динамометром. Тяговое усилие F находится по формуле

На основе полученных результатов определяется зависимость тягового усилия от частоты взмаха крыла. Кроме этого, получены зависимости силы тяги, тока потребляемой мощности и отношения потребляемой мощности к силе тяги представлены на графиках рис. 3–6.
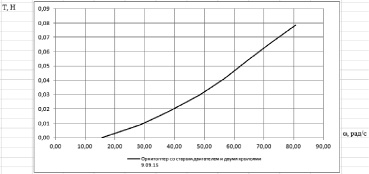
Рис. 3. Зависимость силы тяги от частоты колебаний крыльев
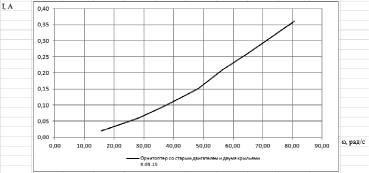
Рис. 4. Зависимость тока в обмотках электродвигателя от частоты колебаний крыльев
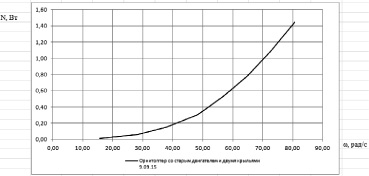
Рис. 5. Зависимость потребляемой мощности от частоты колебаний крыльев
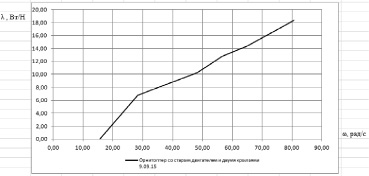
Рис. 6. Зависимость отношения потребляемой мощности к силе тяги от частоты колебаний крыльев
Выводы
1. Разработан и изготовлен экспериментальный комплекс, позволяющий изучать движение робота-инсектоптера, предложены методики, позволяющие определять тяговое усилие, подъемную силу, энергопотребление и ряд других параметров, определение которых экспериментальными методами не представляется возможным.
2. Установлено, что удельное энергопотребление электроприводом машущего крыла, определяемое как отношение потребляемой мощности к создаваемому тяговому усилию, практически линейно зависит от частоты колебаний крыла. Так если, в области низких частот до 30 1/с этот параметр равен примерно 6 Вт/Н, то в области высоких частот 80 1/с он достигает значений 18 Вт/Н, что соответствует энергопотреблению мультироторных систем.
Исследование выполнено при поддержке гранта РФФИ, проект № 14-08-00581.
Рецензенты:
Локтионова О.Г., д.т.н., профессор, проректор по учебной работе, ФГБОУ ВО «Юго-Западный государственный университет», г. Курск;
Кобелев Н.С., д.т.н., профессор, заведующий кафедрой теплогазоснабжения и вентиляции, ФГБОУ ВО «Юго-Западный государственный университет», г. Курск.
Библиографическая ссылка
Ефимов С.В., Коршунов Е.В., Поляков Р.Ю., Тарасов О.С., Яцун С.Ф. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ МАШУЩЕГО КРЫЛА ДЛЯ ПРЫГАЮЩЕ-ЛЕТАЮЩЕГО РОБОТА // Фундаментальные исследования. 2015. № 11-2. С. 252-256;URL: https://fundamental-research.ru/ru/article/view?id=39320 (дата обращения: 04.07.2026).