



В разработанной принципиальной гидравлической схеме управления переносным движением манипулятора в качестве силовых гидроцилиндров используются гидроцилиндры Ц1 и Ц2, штоки которых соединены с осью манипулятора (рис. 1). Питание цилиндров Ц1 и Ц2 осуществляется от насосов регулируемой производительности Н4 и Н5. При этом образуется замкнутая гидрообъемная передача «насос ‒ гидроцилиндр», закон изменения производительности которой задается с помощью профильного устройства системы программного управления.
Управление переносным движением манипулятора
Механизм управления МУ1 представляет собой следящий золотник, гильза которого кинематически жестко связана с гидроцилиндром-приемником Ц8, золотник кинематически связан с задающим устройством-копиром (рис. 2). С другой стороны, сам следящий золотник гидравлически связан с насосом управления Н1 и регулятором скорости РС1, управляющим производительностью насоса Н4. Механизм управления МУ1, суммируя полученные перемещения со стороны гидроцилиндра Ц8 и задающего устройства-копира, подает рабочую жидкость от насоса Н1 в поршневую или штоковую полость гидроцилиндра – регулятора скорости РС-1.
Механизм управления производительностью насоса Н4 состоит из гидроцилиндра с неподвижным двухсторонним штоком, причем диаметры штоков разные, а корпус механически жестко связан с люлькой насоса Н4. Гидроцилиндр с двухсторонним штоком питается от насоса Н2 через следящий золотник, гильза которого кинематически жестко связана с гидроцилиндром, а шток – с регулятором скорости РС-1. Перемещение со стороны регулятора скорости РС-1 преобразуется в угол поворота люльки насоса Н4, который приводит к изменению производительности основного приводного насоса Н4 замкнутой гидрообъемной передачи «насос ‒ цилиндр». Подпитка этой системы осуществляется от насоса Н2 через подпиточные клапаны КО5 и КО6.
При работе всех насосов гидросистемы исполнительного органа основные приводные насосы Н4 и Н5 в исходном положении имеют нулевую производительность (люлька насоса находится в нейтральном положении). Для начала работы гидроцилиндров перемещения исполнительного органа Ц1 и Ц2 приводится в действие задающее устройство – копир.
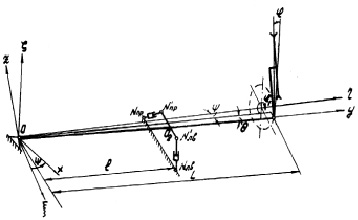
Рис. 1
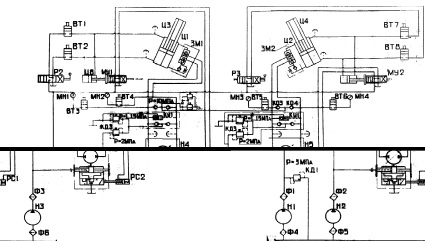
Рис. 2. Принципиальная гидравлическая схема
При перемещении золотника механизма управления МУ1 от копира, например, влево (по чертежу происходит подача рабочей жидкости от насоса Н1 через следящий золотник в штоковую полость гидроцилиндра РС1 и этим самым следящий золотнике насоса Н4 переместится вправо (по чертежу)). Это приводит к тому, что рабочая жидкость от насоса Н2 поступает в обе полости гидроцилиндра РС1 и, поскольку диаметры штоков гидроцилиндра не равны, то происходит перемещение корпуса гидроцилиндра тоже вправо (по чертежу) и изменение производительности насоса Н4.
Рабочая жидкость от насоса Н4, например, поступает через гидрозамок и обратный клапан в поршневую полость гидроцилиндра Ц1, а из штоковой полости через гидрозамок в насос Н4. Разница расходов рабочей жидкости в поршневой и штоковой полостях гидроцилиндра Ц1 восполняется от насоса Н2 через подпиточный клапан КО6.
Гидроцилиндр-датчик Ц3 перемещается вместе с гидроцилиндром Ц1, подает рабочую жидкость из своей штоковой полости в штоковую полость гидроцилиндра Ц8 и последний, перемещаясь влево (по чертежу), перемещает гильзу золотника также влево (как и золотник от копира). В дальнейшем, если не будет задающего перемещения золотнику со стороны копира, то происходит установка гильзы и золотника в нейтральное положение (показанное на чертеже), и этим самым гидроцилиндр РС1 насоса Н4 становится в нейтральное положение и расход насоса Н4 становится нулевым. Аналогично работает система гидрообъемной передачи «насос Н5 ‒ гидроцилиндр Ц2».
Уравнения движения штоков гидроцилиндров
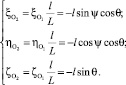
Для вывода уравнений движения штоков гидроцилиндров необходимо определить закон движения точки O2 (точка пересечения оси манипулятора и линии, соединяющей штоки гидроцилиндров. Рассмотрим сечение упаковки, профиль которого формируется при вращении конца оси манипулятора в соответствии с уравнением φ1 = –3φ. Ранее были выведены уравнения движения конца оси манипулятора. Уравнения, определяющие закон движения точки O2, будут представлять
Выпишем координаты точек  ,
,  в системе координат OXYZ:
в системе координат OXYZ:






Воспользовавшись матрицей перехода от системы координат OXYZ к системе Oξηζ
|
(ξ) |
(η) |
(ζ) |
|
|
(X) |
cosψ |
sinψ |
0 |
|
(Y) |
–sinψcosθ |
cosψcosθ |
sinθ |
|
(Z) |
sinψcosθ |
–cosψsinθ |
cosθ |
определим координаты точек  ,
,  в системе Oξηζ
в системе Oξηζ
Заметим, что уравнения представляют собой закон движения точек крепления штоков гидроцилиндров оси манипулятора исполнительного органа.
Теперь воспользовавшись, выпишем координаты точек крепления гидроцилиндров к раме манипулятора Nлв, Nпр
ξNлв = l1 – l; ξNпр = –l2;
ηNлв = l; ηNпр = l;
ζNлв = –l1; ζNпр = –l1.
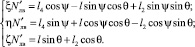
Зная координаты точек Nлв и  , Nпр и
, Nпр и  , определим суммарную длину штоков и гидроцилиндров:
, определим суммарную длину штоков и гидроцилиндров:


Разрешив это уравнение относительно lшлв и lшпр и использовав формулы, найдем уравнения движения штоков гидроцилиндров:
lшлв = lшлв(ψ1θ) = [(l4cosψ – lsinψcosθ + l2sinψsinθ + l2 – l1)2 + (l4sinψ + lcosψcosθ – l2cosψsinθ – l)2 + (lsinθ + l2cosθ + l1)2]1/2 – lц;
lшпр = lшлв(ψ1θ) = [(–l4cosψ – lsinψcosθ + l2sinψsinθ + l2)2 + (–l4sinψ + lcosψcosθ – l2cosψsinθ – l)2 + (lsinθ + l2cosθ + l1)2]1/2 – lц.
Определение расхода жидкости гидроцилиндров
Расход жидкости гидроцилиндров определим по формуле
Θ = FnV,
где Fn – рабочая площадь поршня; V – линейная скорость поршня. При прямом ходе поршня (когда lш увеличивается)  , при обратном ходе поршня (когда lш уменьшается)
, при обратном ходе поршня (когда lш уменьшается)
Fn = π(D2 – d2)/4,
где D – диаметр поршня; d – диаметр штока.
Линейная скорость движения поршня равна скорости конца штока гидроцилиндра


где ωв = φ. – угловая скорость вращения оси.
Для определения скорости поршня по формуле следует в формулах перейти от зависимости lшлв(ψ1θ), lшпр(ψ1θ) к зависимостям lшлв и lшпр от угла поворота оси манипулятора.
Ранее были получены формулы, выражающие зависимость углов ψ и θ от угла поворота оси манипулятора:


В формулах преобразуем выражения, стоящие под корнем, в результате получим


В формулы подставим значения sinψ, sinθ, определяемые по формуле, и cosψ, cosθ, определяемые по формуле
cosψ = (1 – sin2ψ)1/2∙b∙cosθ = (1 – sin2θ)1/2.
Выполнив необходимые преобразования, получим
С помощью полученных формул можно определить расход жидкости гидроцилиндров.
Вывод
Результаты исследований по выводу законов управления переносным движением могут быть использованы при разработке технико-экономического обоснования на создание манипулятора с пространственно-планетарной роликовой головкой для изготовления упаковки различного профиля поперечного сечения.
Рецензенты:
Жизняков А.Л., д.т.н., профессор, первый зам. директора, зав. кафедрой систем автоматизированного проектирования, Муромский институт (филиал) ФГБОУ ВПО «Владимирский государственный университет им. Александра Григорьевича и Николая Григорьевича Столетовых», г. Муром;
Андрианов Д.Е., д.т.н., профессор, зам. директора по учебной работе, зав. кафедрой информационных систем, Муромский институт (филиал) ФГБОУ ВПО «Владимирский государственный университет им. Александра Григорьевича и Николая Григорьевича Столетовых», г. Муром.
Библиографическая ссылка
Лазуткина Н.А. ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ УПРАВЛЕНИЯ ПЕРЕНОСНЫМ ДВИЖЕНИЕМ МАНИПУЛЯТОРА // Фундаментальные исследования. 2015. № 9-3. С. 476-480;URL: https://fundamental-research.ru/ru/article/view?id=39208 (дата обращения: 21.07.2026).