



Аварийность на автомобильном транспорте наносит экономике Российской Федерации значительный ущерб, составляющий по экспертным оценкам до 3 % от ежегодного ВВП страны. На ДТП влияет множество факторов – состояние дорог, интенсивность движения, освещенность, техническое состояние автомобилей, психологическое состояние водителя, уровень его профессиональной подготовки и множество других. Среди них одно из важнейших мест занимает состояние дорожного покрытия. По данным ГИБДД РФ около 20 % аварий происходит по причине неблагоприятных дорожных условий и из них более 70 % (15 % от общего числа ДТП) приходятся на заснеженные дорожные покрытия [1, 5, 12], поэтому актуальной является проблема разработки теории оценки влияния того или иного технического решения на безопасность дорожного движения, выработки на основании данной теории перспективных путей повышения безопасности дорожного движения и утверждения предельно допустимых нормативов параметров транспортных средств, движущихся по заснеженным дорогам [4, 7–9].
Анализ дорожно-транспортных происшествий в зимний период [10, 11] позволил сделать вывод о том, что, наряду с увеличением длины тормозного пути, наиболее частой причиной ДТП является потеря управляемости транспортного средства в результате заноса. При рассмотрении поперечной устойчивости автомобиля предполагается, что при заносе обе оси скользят в поперечном направлении одновременно. Такое явление в практике наблюдается редко. Гораздо чаще начинают скользить колеса одной оси – передней или задней, вследствие чего нужно рассматривать устойчивость не всего автомобиля, а одной из осей.
При торможении автомобиля может возникнуть ряд критических ситуаций, которые представляют особую сложность для реагирования. Это в первую очередь экстренное торможение, а также скачкообразное изменение коэффициента сцепления колеса при торможении. Процесс блокирования колес для таких ситуаций развивается с большой скоростью, поэтому при определении порогов срабатывания проектируемых систем активной безопасности разработчики учитывают в первую очередь динамику изменения угловой скорости колеса.
Критические ситуации при движении автомобиля могут возникать под влиянием совершенно различных факторов, как, например, из-за внезапно появившихся препятствий и резкой смены дорожно-эксплуатационных условий. Как правило, они характеризуются высоким темпом изменения динамики процессов. При этом транспортное средство попадает в граничную область по устойчивости и управляемости и одновременно резко возрастает нагрузка на водителя. Это означает, что для вывода автомобиля из критической ситуации от водителя требуется осуществление сложных и точных управляющих маневров: резких поворотов рулевого колеса, изменения направления движения с одновременным экстренным торможением, сохранения направления в случае движения на повороте при смене дорожных условий и др.
В настоящее время автомобили конструируются на заводах с учётом, что на передних и задних осях установлены одинаковые шины, которые имеют примерно одинаковый коэффициент сцепления колеса с дорогой. Однако в период эксплуатации действующими нормативными документами допускается устанавливать на разные оси автомобили различные шины, коэффициент сцепления с дорогой которых может быть различным [15, 2].
Величина сцепного веса для разных типов автомобиля, условий загрузки различна. Так, для нерегулируемой тормозной системы его значение может быть найдено из условия [3]:
 (1)
(1)
где h – высота расположения центра масс автомобиля; b – расстояние от центра масс автомобиля до задней оси; φ0 – коэффициент сцепления, при котором происходит одновременная блокировка колёс передней и задней оси, определяемый из уравнения
 (2)
(2)
где k – соотношение тормозных сил по осям автомобиля; a – расстояние от центра масс автомобиля до передней оси, а L – длина колёсной базы автомобиля. Для регулируемой тормозной системы на начальном этапе происходит изменение сцепного веса по зависимости 1, а после срабатывания регулятора – по следующей зависимости:
 (3)
(3)
где φ1 – максимальный расчётный коэффициент сцепления, при котором происходит одновременная блокировка колёс передней и задней оси согласно п. 3.1.2.1 Приложения 10 ГОСТ Р 41.13-99 [3] и п. 3.1 Приложения 5 ГОСТ Р 41.13-99 [3] для любых транспортных средств должно быть не более 0,15. Для автомобилей, оснащённых антиблокировочной тормозной системой m(φ) > 0,75 п. 5.2.1. Приложения 6 ГОСТ Р 41.13-99 [3].
Д.А. Соцковым [13] были получены зависимости по определению времени достижения колёс грани блокирования:
– для нерегулируемой тормозной системы
 (4)
(4)
– для тормозной системы с регулятором тормозных сил
 (5)
(5)
– для автомобилей с АБС
 (6)
(6)
В данных уравнениях под W понимается коэффициент передачи РТС, определяемый из условия
 (7)
(7)
где ξ1 и ξ2 – коэффициенты качества работы АБС соответственно для передней и задней осей автомобиля; В1 и В2 – соответственно коэффициенты преобразования давления в тормозной магистрали в величину развиваемого тормозного усилия; G1 и G2 – вес автомобиля, приходящийся соответственно на переднюю и заднюю оси; Мa – величина разворачивающего момента; K0 – темп нарастания давления в тормозах (принят постоянным).
Определить предельно допустимую разницу в коэффициентах сил сцепления колёс передней и задней осей можно, воспользовавшись уравнениями (5) и (6) (в связи с отсутствием актуальности расчёта параметров нерегулируемой тормозной системы как практически не применяемой в настоящее время), путём приравнивания времени достижения блокировки колёс передней и задней оси для системы с регулятором тормозных сил
 (8)
(8)
и для системы с АБС
 (9)
(9)
Следует отметить, что при работе автомобиля имеет место неравномерный износ дисков и накладок тормозов передних и задних колёс. В общем случае передние тормоза как более нагруженные изнашиваются более интенсивно. В пределе данная величина может быть учтена таким параметром, как разница во времени срабатывания тормозного механизма, обозначенная величиной Dt. Тогда уравнения (8) и (9) примут вид:
 (10)
(10)
и для системы с АБС
 (11)
(11)
Тогда допустимая разница в величинах сцепления колёс передней и задней осей может быть найдена из уравнений (10) и (11) путём математических преобразований. Учитывая, что В1 = W(B1 + B2), а В2 = (1 – W)(B1 + B2) и то, что тормозное усилие на передней оси ограничивается только коэффициентом сцепления колеса с дорогой B1P0 = G1φ, где Р0 – давление в рабочей тормозной системе, получим
 (12)
(12)
 (13)
(13)
При этом собственно влияние разницы зазоров в приводе тормозных механизмов передних и задних колёс может быть получено из уравнений (12) и (13):
 (14)
(14)
или
 (15)
(15)
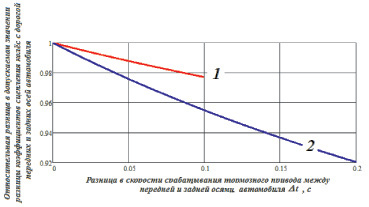
Изменение допустимой разницы коэффициентов сцепления передних и задних колёс от разницы в скорости срабатывания тормозного привода (величины износа тормозных дисков и колодок): 1 – легковые автомобили (нормируемая величина времени срабатывания тормозного привода не более 0,1 с) [14]; 2 – грузовые автомобили с пневмоприводом тормозов (нормируемая величина времени срабатывания тормозного привода не более 0,2 с) [14]
Решение данного уравнения для ряда автомобилей показано на рисунке. Полученные данные свидетельствуют о том, что максимальную опасность представляют торможения на грузовых автомобилях с пневмоприводом тормозов, имеющих допустимое время срабатывания тормозной системы до 0,2 с и значительное расстояние между передней и задней осями. Учёт возможности износа колодок и дисков на легковых автомобилях приводит в самом крайнем случае к изменению величины допустимой разницы коэффициентов сцепления между колёсами передней и задней оси на 2 %.
Полученные данные позволят разработать новые требования к транспортным средствам, находящимся в эксплуатации, и позволят сократить количество дорожно-транспортных происшествий, обусловленных заносом (потерей управляемости транспортных средств при торможении).
Рецензенты:
Вахидов У.Ш., д.т.н., заведующий кафедрой «Строительные и дорожные машины», ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород;
Шапкин В.А., д.т.н., профессор кафедры «Строительные и дорожные машины», ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е.Алексеева», г. Нижний Новгород.
Библиографическая ссылка
Ерасов И.А., Молев Ю.И., Стрижак А.Д., Прошин Д.Н. ВЛИЯНИЕ РАЗНИЦЫ СКОРОСТИ ИЗНОСА ПЕРЕДНИХ И ЗАДНИХ ТОРМОЗНЫХ КОЛОДОК АВТОМОБИЛЯ НА ДОПУСТИМУЮ ВЕЛИЧИНУ ОТКЛОНЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ПЕРЕДНИХ И ЗАДНИХ КОЛЁС // Фундаментальные исследования. 2015. № 9-3. С. 450-454;URL: https://fundamental-research.ru/ru/article/view?id=39203 (дата обращения: 26.06.2026).