



Рассматривается процесс автоматического управления уровнем бумажной массы в напорном ящике бумагоделательной машины БДМ. В герметично закрытом напорном ящике над бумажной массой создается давление (разряжение) в зависимости от скорости машины. Необходимо поддерживать скорость выхода бумажной массы из щели VМ . Эта скорость зависит от суммарного напора H, который, в свою очередь, складывается из уровня бумажной массы и давления воздушной подушки в напорном ящике. Скорость выхода должна соответствовать скорости формующей сетки VC бумагоделательной машины.. Уровень бумажной массы приблизительно постоянный (в зависимости от отклонения, заданного оператором), и основное влияние на скорость выхода массы оказывает давление воздушной подушки. Соответственно, при увеличении давления расход бумажной массы увеличится, и её уровень в напорном ящике начнет падать. В этот момент насос, подающий бумажную массу в напорный ящик, должен увеличить производительность ровно на столько, чтобы уровень удерживался на требуемой величине h* = 330 мм.
Требуемое значение коэффициента перерегулирования в переходном процессе определяется по формуле
 , (1)
, (1)
где h* – заданное значение уровня бумажной массы в напорном ящике; hmin – минимально допустимое значение уровня бумажной массы в напорном ящике в соответствии с требованиями технологического процесса (310 мм).
Подставляя численные значения параметров в формулу (1), получаем допустимое значение коэффициента перерегулирования бумажной массы в переходном процессе, равное 6,45 %. Время переходного процесса по технологии не должно превышать 10 с (tпп ≤ 10). Величина установившейся ошибки должна быть равной нулю (εуст = 0).
Функциональная схема системы автоматического регулирования уровня бумажной массы в напорном ящике. Структурная схема, отображающая все необходимые функциональные блоки и связи между ними, представлена на рис. 1.

Рис. 1. Функциональная схема САР уровня бумажной массы в напорном ящике
Скорость вращения ω вала асинхронного двигателя (АД) с короткозамкнутым ротором через соединительную муфту передаётся на вал насосного агрегата, приводя его в работу и регулируя производительность Q на выходе насоса. Посредством изменения производительности насоса регулируется уровень бумажной массы h в напорном ящике.
На вход тиристорного преобразователя частоты (ТПЧ) подаётся сигнал задания частоты IЗЧ, на выходе ТПЧ – пропорционально изменяющиеся частота f и напряжение U. Посредством изменения питающей частоты и напряжения ТПЧ осуществляет управление асинхронным электродвигателем с короткозамкнутым ротором, который приводит во вращение насос, подающий бумажную массу в напорный ящик.
В процессе автоматического регулирования требуется непрерывно отслеживать текущее состояние регулируемого параметра. Для этого необходим датчик уровня жидкости. На его вход непрерывно поступает физическая величина измеряемого параметра – уровень бумажной массы в напорном ящике h, а на выходе – унифицированный аналоговый сигнал обратной связи в форме тока IОС (4÷20 мА) или напряжения UОС (0÷10 В).
Для выполнения функций автоматического регулирования уровня в состав САР вводится регулятор. Для реализации регулятора необходимо вычислительное устройство, позволяющее с заданным быстродействием контролировать параметры объекта и в реальном времени рассчитывать управляющие воздействия. Таким требованиям удовлетворяют современные промышленные контроллеры. Входы регулятора принимают сигналы задания IЗ(UЗ) и обратной связи IОС(UОС), а на выходе его формируется сигнал управления ТПЧ IЗЧ.
Математическое описание САР. С целью анализа и программной реализации контура автоматического регулирования необходимо с учётом выбранной аппаратуры перейти от функциональной схемы к алгоритмической структурной схеме САР. Для этого отдельные функциональные блоки представляются в виде типовых звеньев.
Напорный ящик (объект регулирования) представляется на структурной схеме идеальным интегрирующим звеном. Передаточная функция объекта
 , (2)
, (2)
где kO – передаточный коэффициент, определяется в установившемся режиме по формуле
 , (3)
, (3)
где QН – номинальная производительность насосной установки; ΔhQн – скорость изменения уровня, обусловленная только управлением, то есть изменение уровня бумажной массы за единицу времени при отсутствии возмущения (P = 0) и номинальной производительности насоса. Данный метод определения коэффициента интегрирования объекта по каналу управления изображён на рис. 2.
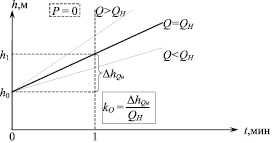
Рис. 2. Временной график изменения уровня при заданных значениях производительности насоса
Номинальная производительность насосной установки VН равна 27 м3/мин. Объём бумажной массы QН в напорном ящике при номинальном значении уровня равен 1,553 м3. Для того, чтобы рассчитать скорость изменения уровня при нулевом возмущающем воздействии, необходимо учитывать расход бумажной массы, вытекающей через напускную щель напорного ящика, и расход бумажной массы для перелива в сепаратор. Объем бумажной массы Qперелив, затрачиваемый на перелив в сепаратор, составляет примерно 5–6 % от общего расхода бумажной массы (1,5 м3/мин).
Для вычисления расхода бумажной массы Qщели, вытекающей через напускную щель напорного ящика, нужно знать высоту открытия напускной щели при максимальной производительности напорного ящика (500 м/мин). Максимальная производительность напорного ящика с учетом перелива бумажной массы в сепаратор вычисляется по формуле
QНЯ = QН – Qперелив = 25,5м3/мин. (4)
Объем бумажной массы, вытекающей за одну минуту из напорного ящика также может быть вычислен по формуле
QНЯ = b·l·VМ , (5)
где VМ – скорость истечения массы из напорного ящика, QНЯ – объемный расход массы, b, l – ширина и высота открытия щели.
Ширина b в соответствии с конструкцией напорного ящика равна 3,5 м. Тогда можно вычислить высоту открытия напускной щели при максимальной производительности напорного ящика b = 14,5 мм (0,0145 м). Скорость истечения массы из напорного ящика при нулевом возмущающем воздействии (P = 0) и при номинальном уровне VМP = 0 = 152,67 м/мин. Объемный расход бумажной массы, вытекающей из напорного ящика, при нулевом возмущающем воздействии:
QНЯ.P=0=b·l·VМP = 0 = 7,74м3/мин. (6)
Таким образом, скорость изменения уровня в напорном ящике при номинальной производительности насоса можно вычислить по формуле:

 м/мин. (7)
м/мин. (7)
Подставляя рассчитанные значения ΔhQн и QН в формулу (3), определяем численное значение статического коэффициента интегрирования и передаточную функцию объекта по каналу управления:
 . (8)
. (8)
Передаточная функция канала возмущения (давление воздушной подушки) представляется в виде апериодического звена, так как изменение давления воздушной подушки происходит не мгновенно, а с некоторой инерционностью. Передаточная функция возмущающего воздействия:
 , (9)
, (9)
где ТF – постоянная времени, вычислена экспериментальным путем.
Сигнал по каналу возмущения будет приходить с отрицательным знаком, так как при возмущении уровень бумажной массы уменьшается.
Передаточная функция насосной установки. Регулирующий насос представляет собой апериодическое звено, преобразующее скорость вращения вала ω на входе в производительность насоса. Передаточная функция насоса имеет вид:
 (10)
(10)
где kН – статический передаточный коэффициент насоса; TН – постоянная времени насоса.
Постоянную времени для насоса принимаем TН = 0,2 с. Коэффициент передачи насоса определяется в статическом режиме как отношение номинальной производительности насоса QН к номинальной скорости электродвигателя насоса ωН. Номинальная производительность QН = 27 м3/мин, (0,45 м3/с); номинальная скорость ωН = 1488 об/мин, (155,74 рад/с).
Передаточная функция асинхронного электродвигателя Siemens 1LA8 315-4AB:
 , (11)
, (11)
где kДВ – статический передаточный коэффициент асинхронного электродвигателя; TН – постоянная времени двигателя.
Статический передаточный коэффициент двигателя определяется как отношение угловой скорости вращения двигателя ω к частоте питающей сети f. Номинальная частота питания fН = 50 Гц, а значение номинальной угловой скорости вращения двигателя ωН рассчитывается из номинальной частоты вращения ротора по формуле:
 рад/с. (12)
рад/с. (12)
Передаточная функция тиристорного преобразователя:
 . (13)
. (13)
Передаточный коэффициент тиристорного преобразователя определяется в статическом режиме при номинальном значении выходного воздействия по формуле
 , (14)
, (14)
где fН – частота на выходе тиристорного преобразователя, обеспечивающая номинальный режим работы двигателя; IВХ.Н – управляющий ток на входе ТПЧ, который обеспечивает номинальную частоту на выходе.
Поскольку управление ТПЧ осуществляется током 4÷20 мА, а частоту двигателя необходимо изменять в диапазоне 0÷50 Гц, то номинальной частоте двигателя (fН = 50 Гц) будет соответствовать входное напряжение управления ТПЧ IВХ.Н = 20 мА.
Постоянная времени тиристорного преобразователя определяется по формуле
 , (15)
, (15)
где ТФ – постоянная времени цепи системы импульсно-фазового управления (СИФУ) ТПЧ, включая фильтр; m – число фаз ТПЧ.
Значение постоянной времени цепи СИФУ тиристорных преобразователей обычно составляет 0,003÷0,005 с, поэтому при моделировании принято принимать значение ТФ из данного диапазона. С учётом относительной новизны выбранного частотного преобразователя принимаем минимальное значение ТФ = 0,003 с. Поскольку ТПЧ осуществляет управление трёхфазным двигателем, то число фаз m = 3. Номинальное значение выходной частоты fН составляет 50 Гц.
Датчик уровня как элемент структурной схемы представляет собой безынерционное звено.
В напорном ящике поддерживается постоянный уровень 0,33 метра, что соответствует примерно 15 мА на выходе датчика. Отсюда найдем передаточную функцию датчика уровня:
 . (16)
. (16)
Моделирование САР. При моделировании в пакете Scilab был получен график переходной характеристики объекта управления (рис. 3).
Из переходной характеристики объекта видно, что уровень бумажной массы резко уменьшится, если давление воздушной подушки увеличится. Значения параметров ПИД-регулятора рассчитаны по методу Зиглера-Николса: в структурную схему необходимо ввести ограничения, обусловленные возможностями реализации структурных блоков. В частности, особые требования предъявляются к сигналу управления тиристорным преобразователем: это должен быть токовый сигнал 4÷20 мА. В модели с ПИД-регулятора на звено ТПЧ подаётся сигнал, величина которого не ограничена и может превышать реально возможные пределы. Ограничение данного сигнала как любая нелинейность может повлиять на показатели качества регулирования в статике и динамике, однако оно неизбежно ввиду ограниченных возможностей реализации системы, и поэтому пренебрегать им не следует. Структура САР уровня бумажной массы в напорном ящике приведена на рис. 4, там же приведены два графика с общей временной осью: нижний график отражает управляющее воздействие с выхода ПИД-регулятора, ограниченное диапазоном 4÷20 мА; верхний график – соответствующая данному управлению переходная характеристика САР.
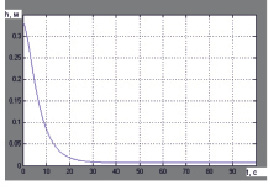
Рис. 3. Переходная характеристика объекта управления
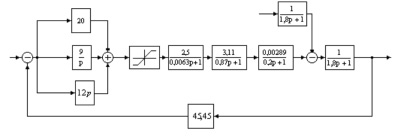
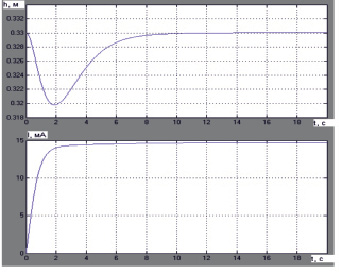
Рис. 4. Модель САР уровня бумажной массы в напорном ящике и переходная характеристика САР уровня бумажной массы с введённым ограничением выходного сигнала регулятора
Заключение
Проведенный синтез системы автоматического регулирования уровня позволил добиться показателей качества, удовлетворяющих требования технологического процесса.
Рецензенты:
Казанцев В.П., д.т.н., доцент, профессор кафедры микропроцессорных средств автоматизации, ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь;
Бочкарев С.В., д.т.н., доцент, профессор кафедры микропроцессорных средств автоматизации, ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь.
Библиографическая ссылка
Билоус О.А. СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УРОВНЯ БУМАЖНОЙ МАССЫ В НАПОРНОМ ЯЩИКЕ // Фундаментальные исследования. 2015. № 8-1. С. 93-98;URL: https://fundamental-research.ru/ru/article/view?id=38853 (дата обращения: 10.07.2026).