



В настоящее время массово доступные приёмники потребителя глобальных навигационных спутниковых систем (ГНСС) позволяют получить координаты потребителя с погрешностью 5…10 метров [5, 1]. Такая точность удовлетворяет транспортным применениям при навигации движения по маршруту, для контроля за перемещением объектов в диспетчерских службах перевозок, охраны, в исследовательских целях. Но такой точности недостаточно для многих хозяйственных применений спутниковой навигации. Например, заход на посадку воздушных судов по категориям международной организации гражданской авиации (ИКАО), маневрирование морских судов в узких акваториях, использование для решения топогеодезических, гидрографических и других задач.
Обеспечить точными координатными определениями потребителей ГНСС можно, создав локальную дифференциальную систему ГНСС. В основе дифференциального режима работы спутниковых радионавигационных систем (СРНС) лежит свойство пространственно-временной коррелированности погрешностей измерений радионавигационных параметров радиосигналов навигационных спутников (НС), проведенных в различных точках пространства в близкие моменты времени [4]. При этом штатное оборудование СРНС дополняется рядом технических средств, совокупность которых образует дифференциальную подсистему (ДПС), которая является функциональным дополнением СРНС. В России существует несколько десятков подобных систем, охватывающих месторождения, бассейны рек, участки железных дорог, мосты. Но подавляющее большинство этих систем являются ведомственными и поэтому доступны ограниченному числу людей, а также такие системы используют дорогостоящую зарубежную аппаратуру и программное обеспечение [2]. Зоны действия наземных функциональных дополнений СРНС в России показаны на рис. 1.

Рис. 1. Зоны действия наземных функциональных дополнений СРНС в России
Важный, распространенный и весьма перспективный класс локальных ДПС составляют системы геодезического обеспечения с дальностью не более 50 км и сантиметровой-дециметровой точностью. Как правило, их использование допускает серьезную обработку измерений после того, как эти измерения проведены [7].
На территории города Екатеринбурга создаётся пилотный проект локальной дифференциальной системы на базе отечественной навигационной аппаратуры производства Российского института радионавигации и времени (РИРВ), г. Санкт-Петербург. Эта система создаётся на базе Уральского федерального университета (УрФУ) совместно с местным оператором сотовой связи. Преимуществом создаваемой системы является её доступность для населения.
Технология создания локальной системы повышенной точности местоопределения, с использованием СРНС, включает следующие этапы: подготовительные работы, полевые измерения, обработка полевых измерений и оценка точности измерений. Подготовительные работы предполагают подготовку аппаратуры и проверку ее работоспособности, определение прогноза видимых навигационных космических аппаратов (НКА), составление плана измерений и схемы передвижения по маршруту [7].
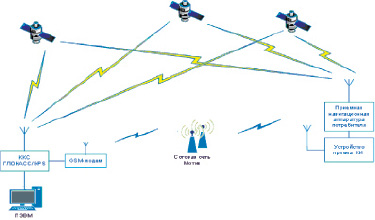
Рис. 2. Структура локальной дифференциальной системы: ГККС ГЛОНАСС/GPS, базовая станция сотовой сети связи, навигационная аппаратура потребителей (НАП), навигационный спутник (НС)
На территории УрФУ установлена геодезическая контрольно-корректирующая станция (ГККС) производства РИРВ [6]. Антенна ГККС установлена на крыше здания. Аппаратура ГККС может автономно определять собственные координаты с погрешностью не более 10 см. Структура создаваемой локальной дифференциальной системы показана на рис. 2.
Осуществлены работы по настройке и точной координатной привязке антенны ГККС. Для осуществления координатной привязки станция в течение 12 часов принимала сигналы диапазонов L1 и L2 от навигационных спутников ГЛОНАСС и GPS. Было получено несколько точек координатных измерений. Обработка измерений произведена с помощью компьютерной программы фирмы-производителя. Накопленные координатные определения в виде файлов с расширением *.mpi станция передавала на персональный компьютер (ПК). На ПК при помощи файлового менеджера ГККС осуществлялось преобразование файлов измерений *.mpi в формат BL DS/Leica. После чего в программе BL-GEO for Windows осуществлялся импорт файлов из BL DS/Leica формата. После этого в режиме постобработки данных программой BL-GEO осуществлялось определение точных координат фазового центра антенны. Полученные координаты фазового центра антенны в системе WGS-84 в формате XYZ: X = 1714023,7056 м, Y = 3048156,1566 м, Z = 5316452,9981 м, и пересчитаны в формат BLH: B = 56°50′26,2402″, L = 60°39′01,0883″, H = 286,5327 м. Вычисленные таким образом координаты введены в ГККС в качестве шаблона.
После точной привязки ГККС включается в дифференциальном режиме. Сравнивая шаблонные координаты со значениями координат, вычисленными по принятым радиосигналам НС, ГККС вычисляет корректирующие поправки к измеренным параметрам и формирует RTCM-сообщения. При этом станция формирует корректирующую информацию (КИ), предназначенную для потребителей, находящихся в зоне 30 км от станции. В КИ входят кадры сообщений в формате RTCM-SC 104 с номерами 1 – дифференциальные поправки GPS (фиксированное), 3 – параметры опорной станции GPS (фиксированное), 5 – техническое состояние созвездия GPS (фиксированное), 6 – нулевой кадр GPS (фиксированное), 9 – система частных поправок GPS (фиксированное), 16 – специальное сообщение GPS (фиксированное), 18 – нескорректированные с помощью метода Real-time kinematic (RTK) фазы несущей (фиксированное), 19 – нескорректированные с помощью метода RTK псевдодальности (фиксированное), 31 – дифференциальные поправки ГЛОНАСС (экспериментальное), 32 – параметры опорной станции ГЛОНАСС (экспериментальное), 33 – техническое состояние созвездия ГЛОНАСС (экспериментальное), 34 – нулевой кадр ГЛОНАСС (экспериментальное), 36 – специальное сообщение ГЛОНАСС (экспериментальное) [7]. Информация с ГККС собирается в центре управления оператора сотовой связи. Потребитель по запросу, который он посылает в центр управления, получает КИ из этого центра по каналу GSM. С учётом КИ точность определения местоположения стандартной аппаратурой потребителя повышается до нескольких дециметров.
Существующие на данный момент в России локальные и региональные дифференциальные системы для передачи информации используют ведомственные средства связи. Доступ потребителей в таких системах ограничен их ведомственным назначением [7, 3].
В создаваемой системе региональный оператор сотовой связи может доставлять КИ до каждого абонента сети, желающего иметь такую услугу. Абонент сотовой сети, желающий иметь услугу точного позиционирования, должен иметь навигационный приёмник и специальный модем, позволяющий посылать в сеть запросы на приём КИ и принимать КИ в предусмотренном формате (рис. 3). Специальный модем должен состоять из GSM модема и микроконтроллера. Задачами микроконтроллера являются управление GSM модемом и формирование запросов на приём КИ.
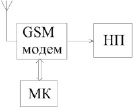
Рис. 3. Навигационный приемник, оснащенный техническими средствами для работы в дифференциальном режиме: GSM модем и управляющий микроконтроллер (МК)
Существующий в России опыт создания локальных и региональных дифференциальных подсистем основан на договорах с иностранными партнёрами, использует иностранное оборудование и рассчитан на ведомственные применения. В таких системах доступ ограничен ведомственным назначением. Для создания общедоступной локальной дифференциальной системы предлагается создавать её на базе сетей сотовой связи. Разработан проект локальной дифференциальной подсистемы на базе ГККС производства РИРВ и сотовой сети «Мотив». Локальная дифференциальная подсистема представляет собой часть региональной дифференциальной подсистемы областного масштаба. Показана возможность создания системы точного позиционирования на региональном уровне на основе системы сотовой связи. Достоинствами системы являются её низкая стоимость и общедоступность для населения.
Было проведено исследование повышения точности определения местоположения потребителя с использованием разрабатываемой ЛДС. Эксперименты проводились с двухчастотным приёмником «Изыскание» производства РИРВ. Антенна, приёмник и ноутбук были установлены на открытой местности. В течение всех экспериментов антенна была неподвижна. Были включены аппаратура «Изыскание» и ноутбук. Приёмная аппаратура «Изыскание» была переведена в режим «Статика», т.е. точное измерение при неподвижной антенне. На ноутбуке была открыта программа GEO RTK, позволяющая отображать всю информацию от приёмника и управлять им. Приёмник и ноутбук обменивались данными по интерфейсу RS-232. Навигационный приёмник постоянно измерял свои координаты по сигналам ГЛОНАСС и GPS.
Было проведено 10 измерений в одном месте установки антенны. При этом координаты точки на местности были известны. При решении навигационной задачи двухчастотным приёмником «Изыскание» среднеквадратическое отклонение составляло 3…5 метров без использования КИ. Было проведено 10 измерений в одном месте установки антенны при использовании КИ, получаемой от ККС по GSM каналу. Результаты измерений показали среднеквадратическое отклонение, не превышающее 0,5 метра. Результаты показывают, на сколько повышается точность определения местоположения благодаря приёму КИ навигационной аппаратурой потребителя. Результаты измерений представлены на рис. 4. График 1 соответствует ситуации без приёма КИ, а график 2 – с приёмом КИ. В среднем СКО уменьшилось в 8 раз по сравнению с экспериментами, когда аппаратура потребителя не принимала КИ.
Таким образом, можно сделать вывод, что созданная ЛДС функционирует и позволяет на практике значительно повышать точность определения местоположения потребителя. Это свойство может быть использовано потребителями в различных сферах применения.
Показана возможность создания локальной дифференциальной подсистемы ГЛОНАСС/GPS на основе системы сотовой связи. Рассмотрены технические задачи, которые необходимо решить оператору сотовой связи для того, чтобы можно было ввести услугу повышения точности позиционирования абонентов по сигналам ГНСС. Подсистема введена в эксплуатацию и позволяет существенно повышать точность определения координат потребителя навигационной аппаратуры. Данная работа выполнена по проекту «Внедрение технологии дифференциальной ГЛОНАСС в хозяйственную деятельность Свердловской области», поддержанному РФФИ (РГНФ) и Правительством Свердловской области.
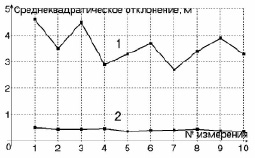
Рис. 4. Значения среднеквадратического отклонения определения местоположения при различных измерениях
Данная работа получила награду «Лучший доклад» по итогам конференции «Информационные технологии, телекоммуникации и системы управления», УрФУ, ИРИТ-РтФ 15 декабря 2014 года.
Рецензенты:
Шабунин С.Н., д.т.н., доцент, профессор кафедры высокочастотных средств радиосвязи и телевидения, первый заместитель директора института радиоэлектроники и информационных технологий, Уральский федеральный университет им. первого Президента России Б.Н. Ельцина, г. Екатеринбург;
Иванов В.Э., д.т.н., профессор, зав. кафедрой технологий и средств связи, Уральский федеральный университет им. первого Президента России Б.Н. Ельцина, г. Екатеринбург.
Библиографическая ссылка
Ергашев Н.В., Корнилов И.Н. СОЗДАНИЕ ЛОКАЛЬНОЙ ДИФФЕРЕНЦИАЛЬНОЙ ПОДСИСТЕМЫ НА ОСНОВЕ СОТОВОЙ СЕТИ СВЯЗИ // Фундаментальные исследования. 2015. № 7-4. С. 755-759;URL: https://fundamental-research.ru/ru/article/view?id=38815 (дата обращения: 30.07.2026).