



Сегодня многие рыболовецские суда используют классические орудия лова: тралы, ловушки, невода, организуя лов гидробионтов как активной, так и пассивной технологией. Необходимость улучшения качества улова и повышения рентабельности промысла делает привлекательным использование пассивных орудий лова. Одним из таких орудий являются яруса.
Ярусный лов, как пелагический, придонный использует суда, которые могут расходовать минимум топлива (50% промысла суда находятся в дрейфе). Высокая адаптивность простой конструкции яруса позволяет облавливать гидробионты в труднодоступных местах на глубине видового ареала их обитания, тем самым, обеспечивая живой улов.
Современные математические модели рыболовных систем являются мощным инструментом автоматизированного расчета орудий лова и их моделирования на компьютере.
Математические модели [1,2,3], позволяют решать следующие основные задачи механики ярусов:
- определение оптимального диаметра хребтины яруса;
- определение устойчивого диаметра промежуточного буя;
- определение массы грузов, обеспечивающие устойчивость хребтины яруса в потоке;
- определение массы якорей, обеспечивающие устойчивость хребтины яруса в потоке;
- определение оптимальной длины хребтины яруса в потоке;
- определение натяжения хребтины ярусного порядка;
- определение мощности ярусно-выборочной лебедки;
- определение привлекательности наживки.
Предложенные задачи механики ярусов связаны с анализом основных параметров яруса, расчет которых необходимо произвести для эффективного лова ярусами. Использование компьютерных программ для моделирования ярусов в потоке позволит оперативно решать задачи настройки яруса.
Современные математические модели рыболовных систем являются мощным инструментом автоматизированного расчета орудий лова и их моделирования на компьютере.
Для разработки математических моделей ярусных порядков их необходимо разбить на следующие подсистемы по функциональным признакам, рис. 1:
- якорь (1)
- якорный буй-буйреп (10-11);
- промежуточный буй-буйлинь (4-5);
- грунт-левый якорь-подъякорник-якорный линь (0-1-2-3);
- наживка-крючок-поводец (6-7-8);
- якорный линь-буйлинь-хребтина
(3-5-9); - поводцы-хребтина (7-9);
- хребтина первого участка яруса A1B1;
- хребтина i-го участка яруса AiBi;
- правый якорный линь - правый якорь.
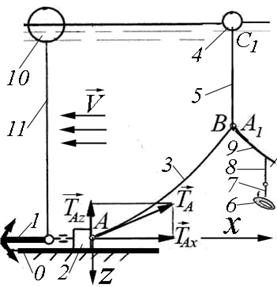
Рис. 1. Подсистемы: «грунт-якорь-якорный линь (0-1-2-3)», «промежуточный буй-буйлинь (4-5)», «якорный буй-буйреп (10-11)»; «якорный линь-буйлинь-хребтина (3-5-9)», «поводцы-хребтина (8-9)»; «наживка-крючок-поводец (6-7-8)»:
Для данных подсистем разработаны математические модели [1,2], позволяющие, позволяющие решать следующие основные задачи:
- определение оптимального диаметра хребтины яруса;
- определение устойчивого диаметра промежуточного буя;
- определение массы грузов, обеспечивающие устойчивость хребтины яруса в потоке;
- определение массы якорей, обеспечивающие устойчивость хребтины яруса в потоке;
- определение оптимальной длины хребтины яруса в потоке;
- определение натяжения хребтины ярусного порядка;
- определение мощности ярусно-выборочной лебедки;
- определение привлекательности наживки.
СПИСОК ЛИТЕРАТУРЫ:
- Габрюк Л.А. Методика моделирования хребтин ярусов, Известия ТИНРО., 2008, Том 153, с.382-386.
- Габрюк Л.А., Бойцов А.Н. Механика хребтин ярусов, Известия ТИНРО, 2008, Том 153, с.387-392.
- Аналитические методы моделирования горизонтальных ярусов Известия ТИНРО., 2008, Том 154, с.350-366.
Библиографическая ссылка
Габрюк Л.А ОСНОВНЫЕ ЗАДАЧИ МЕХАНИКИ ЯРУСОВ // Фундаментальные исследования. 2008. № 9. С. 63-64;URL: https://fundamental-research.ru/ru/article/view?id=3708 (дата обращения: 04.07.2026).