



Министерство промышленности, инновационных и информационных технологий Рязанской области проводит активную работу по развитию и поддержке высокотехнологичного производства в регионе. Кроме того, Минпром на конкурсной основе организует предоставление субсидий за счет средств областного бюджета на государственную поддержку научной и научно-технической деятельности (http://minprom.ryazangov.ru/tenders/71751/).
В этом году по договору с Министерством промышленности, инновационных и информационных технологий Рязанской области № 18 от 25 июня 2014 г. о предоставлении субсидии за счет средств областного бюджета на компенсацию части расходов, связанных с выполнением научно-технического проекта, было проведено исследование по разработке макетного образца бортового навигационно-связного устройства для сельскохозяйственной техники, работающего с использованием системы ГЛОНАСС.
Основными результатами работы стало изготовление и испытание опытного образца бортового навигационно-связного устройства на платформе ГЛОНАСС.
Ожидается второй этап развития проекта, который позволит создать региональную систему мониторинга транспорта агропромышленного комплекса и организовать мелкосерийное производство навигационно-связного оборудования в Рязанской области.
Состав макетного и опытного образцов системы скомплектован с использованием производственных площадок и специалистов холдинга SpaceTeamHolding (СТ Холдинг), фирмы «М2М-телематика Рязань», научно-производственной фирмы «Мета», ФГБУ «Рязанский приборный завод», ООО «Навтелеком», КБ «НАВИС», малого инновационного предприятия «АГРОНАСС», созданного при Рязанском государственном агротехнологическом университете имени Костычева.
Внешний облик разработанного макетного образца представлен на фотографиях.

Рис. 1. Макетный образец бортового навигационно-связного устройства для сельскохозяйственной техники, вид сверху

Рис. 2. Макетный образец бортового навигационно-связного устройства для сельскохозяйственной техники, вид сбоку
В рамках договора с МИП ООО «Агронасс» обществом с ограниченной ответственностью был изготовлен один экземпляр макетного образца бортового навигационно-связного устройства для сельскохозяйственной техники согласно техническому заданию, разработанному авторским коллективом проекта. В рамках договора МИП ООО «Агронасс» были выполнены следующие виды работ: осуществлено проектирование и изготовление печатной платы образца согласно техническому заданию, осуществлен ручной монтаж печатной платы образца согласно техническому заданию, укомплектование печатной платы образца необходимыми электронными компонентами согласно техническому заданию, осуществлен технический контроль и проверка печатной платы.

Рис. 3. Макетный образец бортового навигационно-связного устройства для сельскохозяйственной техники

Рис. 4. Макетный образец бортового навигационно-связного устройства для сельскохозяйственной техники со снятой крышкой

Рис. 5. Макетный образец с подключенными внешними антеннами GPS/ГЛОНАСС и GSM, разъемом micro USB и интерфейсным разъемом
В рамках договора с ООО «Навтелеком» обществом с ограниченной ответственностью был разработан один экземпляр микропрограммы (прошивки) для макетного образца бортового навигационно-связного устройства для сельскохозяйственной техники согласно техническому заданию, разработанному авторским коллективом проекта.
Кроме того, «Навтелеком» представил вычислительные мощности для размещения навигационной и мониторинговой информации на сервере, постоянно находящемся в сети Интернет.
Для изготовления макетных образцов разработанных бортовых навигационно-связных устройств были использованы следующие комплектующие (электродетали и т.п.): ГЛОНАСС модуль НАВИА ML8088sЕ, GSM/GPRS модуль SIM900R, микроконтроллер семейства AT91 на основе ядра ЦПУ ARM® Thumb®, 74HC14D – инвертирующий триггер Шмита, DC–DC преобразователь LM2596, TECAP, 22 мкФ, 25 В, тип D, 20 %, конденсатор танталовый SMD, AD3335 точный потенциометр, SDR1006-331KL, 330 мкГн, индуктивность SMD, IRLML6402TRPBF MOSFET силовой транзистор и др.
При проведении эксперимента для взаимодействия в единой системе с навигационно-связным оборудованием использовался ряд выносных датчиков. В частности, датчик положения механизма СКАУТ, датчик положения механизмов предназначен для контроля работы спецтехники. Устанавливается на подвижную часть и регистрирует факт работы механизма, что позволяет контролировать эффективность использования техники, а значит, снижать расходы на её содержание. Напряжение питания – 4–27 В. Рабочий диапазон температур – 40 – + 65. Степень защиты – IP54. Погрешность частоты не более 1 %.

Рис. 6. Датчик положения механизма СКАУТ
Датчик уровня топлива Omnicomm LLS-AF 20310 осуществляет передачу снятых показаний частотным или аналоговым сигналом. Прибор позволяет гибкую настройку пределов и свойств выходных сигналов. Выходной уровень сигнала не зависит от напряжения питания, благодаря чему датчик можно использовать совместно с любым терминалом, имеющим измерительный вход по частоте или напряжению.

Рис. 7. Датчик температуры СКАУТ
Датчик температуры СКАУТ. Интерфейс: стандарт 1WIRE (однопровод). Напряжение питания: 8–30 В. Диапазон измерения: – 55 – + 125 °С. Чувствительность: +/– 0,5 °С. Погрешность в диапазоне граничных температур (– 55, 125 °С) – до 2 °С. Ток потребления: максимум 5 мА. Длина информационного кабеля (шины) – до 20 метров. Защита от импульсных помех до 2 кВ.

Рис. 8. Антенна GPS/ГЛОНАСС

Рис. 9. Антенна GSM-900

Рис. 10. Считыватель увеличенной дальности карт Matrix V EM-Marine
Рабочая частота – 125 KHz, 433 МГц. Дальность чтения: карточка ЕМ-Marine (05 ELR) – до 0,5 м. Радиобрелок IL-100 (Keeloq) – до 10 м. Радиобрелок CAME серии. Top 433,92 МГц – до 10 м. Протоколы Wiegand 26, iButton. Напряжение питания 12 В постоянного тока. Потребление тока 200 mA. Индикация – сигнал зуммера, два светодиода. Рабочая температура – 40 °С + 50 °С. Влажность не более 90 %. Выходной интерфейс Dallas TM, Wiegand 26, RS-485, цвет корпуса – тёмно-серый. Вес брутто 1200 граммов. Размер 230×230×35 mm.
Карты EM-Marine. Адаптер для считывания и передачи в компьютер серийных номеров карт EM-Marine. Рабочая частота: 13,56 MHz&125КHz одновременно. Чтение карт & брелков стандарта: EM Marine, HID ProxCard II, Mifare, Mifare Plus Mifare-UL (чтение и запись).

Рис. 11. Карты EM-Marine
Рабочая температура: 0 °С до + 50 °С. Цвет корпуса: матовый чёрный. Выходной интерфейс: USB.
Кроме бортового навигационно-связного оборудования, взвимодействующего с вышеперечисленными датчиками, был развернут опытный образец мобильного диспетчерского пункта, который обеспечивает реализацию следующих функций:
– слежение, управление и анализ текущего состояния контролируемых объектов;
– контроль объектов – соблюдение режимов работы;
– повышение эффективности использования мобильных энергетических средств, специальной техники;
– предотвращение возможности хищения топлива;
– снижение затрат на ремонт техники;
– выявление недобросовестных работников;
– повышение эффективности планирования маршрутов и безопасности грузоперевозок;
– накопление и систематизация всей информации в базе данных.
Система спутникового контроля и мониторинга осуществляет контроль по следующим параметрам:
– текущее местоположение;
– пройденный маршрут по заданным контрольным точкам;
– скорость движения;
– факт включения зажигания;
– количество топлива в баках;
– путевой расход топлива;
– расход топлива, его заправки и сливы;
– загруженность, положение механизмов (плуги, жатки, культиваторы и т.п.), открывание дверей, капота, опрокидывание кузова и т.д;.
– время движения;
– время и места стоянок;
– обороты двигателя;
– количество моточасов;
– подключение «тревожной кнопки»;
– управление исполнительными устройствами;
– направление движения механизмов (напр. вращение валов высевающих аппаратов).

Рис. 12. Устройство настройки (УНУ) предназначено для подключения датчиков LLS к персональному компьютеру
Опытный образец мобильного диспетчерского пункта со специализированным ПО также позволяет:
– отобразить маршруты подотчётных объектов за любой период времени;
– отобразить на карте положения объектов в текущий момент времени (on-line контроль);
– сохранять всю информацию в локальной базе данных системы спутникового контроля и мониторинга движения объектов, позволяющей не иметь постоянное подключение к Internet;
– сохранять всю информацию в течение нескольких месяцев при выходе транспорта из зоны действия сети GSM;
– составлять путевые листы в привычной форме и хранить их в базе данных;
– составлять отчеты о посещении объектов и автоматически сопоставить их с путевыми листами;
– составлять табличные и графические отчеты по расходу топлива, пробегу, скорости, времени в пути и т.д. за любой период по каждому объекту или механизатору;
– сохранять отчеты в популярных форматах (pdf, word, excel, html и т.д.) и напрямую выводить на печать.
Макетный образец бортового навигационно-связного устройства для сельскохозяйственной техники принимает спутниковые навигационные сигналы от орбитальных группировок ГЛОНАСС/GPS, обрабатывает их и, вычисляя свои координаты и параметры движения, передает зашифрованную информацию по каналам сетей сотовой связи в формате GPRS на специализированный сервер, где данная информация анализируется, хранится и впоследствии передается по проводным и беспроводным сетям через Интернет на опытный мобильный диспетчерский пункт мониторинга.
Опытный мобильный диспетчерский пункт мониторинга представляет собой персональный компьютер, оборудованный 3G-WiFi роутером с установленным специализированным программным обеспечением.
В качестве портативного компьютера (ноутбука) для развертывания на его базе опытного мобильного диспетчерского пункта мониторинга (МДП) и обработки данных был приобретен персональный компьютер ASUS X550LC/Corei3 4010U 1700 Mhz/15.6»/1366x768/6.0Gb/500Gb/DVD-RW/NVIDIA GeForce GT 720M/Wi-Fi/Bluetooth/Win-8 64х.
Роутер ALCATEL ONETOUCH One Touch Link Y600, 3G / Wi-Fi Mobile принимает телеметрическую информацию от специализированного сервера по сети 3G и по беспроводному каналу Wi-Fi передает её в персональный компьютер ASUS X550LC с установленным специализированным программным обеспечением. Таким образом, 3G-WiFi Роутер является связующим звеном между специализированным телеметрическим сервером и персональным компьютером.
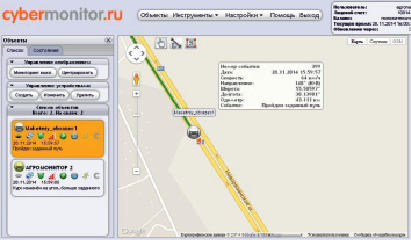
Рис. 13. Интерфейс программного обеспечения опытного образца мобильного диспетчерского пункта
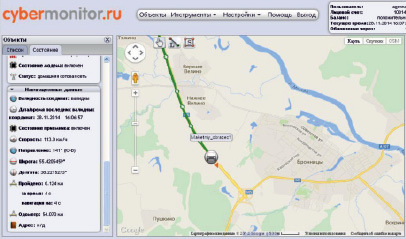
Рис. 14. Навигационные данные макетного образца
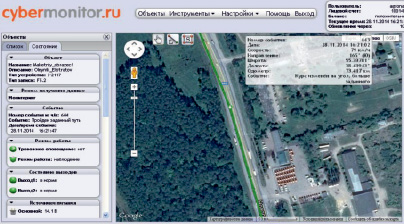
Рис. 15. Параметры перемещения макетного образца
Программа испытаний макетного образца бортового навигационно-связного устройства для сельскохозяйственной техники включала в себя определение информации об объекте, информации об отчетных интервалах, информацию о движении, информацию о работе двигателя мобильного энергетического средства, информацию о состоянии связи, информацию о состоянии навигации и таблицы событий для самого устройства, подключенных датчиков движениям и стоянкам мобильного энергетического средства.
В обобщенный отчет о параметрах работы устройства входят такие показатели, как:
– количество событий на интервале;
– время первого и последнего события;
– фактический интервал времени события;
– начальное и конечное состояние одометра в км;
– пробег в км; средняя скорость на интервале в км/ч;
– средняя скорость в движении в км/ч;
– максимальная скорость в км/ч;
– время в движении; общее время стоянок;
– общее время работы двигателя;
– время работы двигателя при отсутствии движения;
– информация о скорости объекта;
– информация о состоянии двигателя объекта;
– информация о состоянии связи с объектом;
– информация о состоянии навигации макетного образца;
– время события, тип датчика, вид события и его длительность;
– адрес и геозона стоянки.
Проведенные испытания показали высокую эффективность работы разработанного макетного образца бортового навигационно-связного оборудования ГЛОНАСС.
Разработанный макетный образец терминала ГЛОНАСС, как показали испытания, может быть использован не только в интересах транспорта агропромышленного комплекса, но и в интересах других отраслей народного хозяйства, включая и силовые ведомства Российской Федерации.
В дальнейшем планируется подготовить образец к мелкосерийному производству.
При отладке оборудования уделяется особое место реализации электронного паспортирования и управлению эксплуатации наземных транспортных объектов, при этом за основу взята концепция развития интерактивной электронной документации летательных аппаратов государственной авиации.
Рецензенты:
Успенский И.А., д.т.н., профессор, заведующий кафедрой «Техническая эксплуатация транспорта», ФГБОУ ВПО РГАТУ, г. Рязань;
Лазуткина Л.Н., д.п.н., доцент, проректор по научной работе ФГБОУ ВПО РГАТУ, генеральный директор малого инновационного предприятия «АГРОНАСС», г. Рязань.
Работа поступила в редакцию 31.12.2014.
Библиографическая ссылка
Елистратов В.В., Олейник Д.О., Безруков С.И., Климаков В.С., Стенин П.Г. ЭКСПЕРИМЕНТАЛЬНАЯ ОЦЕНКА ЭФФЕКТИВНОСТИ ФУНКЦИОНИРОВАНИЯ РАЗРАБОТАННОГО ОПЫТНОГО ОБРАЗЦА БОРТОВОГО НАВИГАЦИОННО-СВЯЗНОГО УСТРОЙСТВА НА ПЛАТФОРМЕ ГЛОНАСС // Фундаментальные исследования. 2014. № 12-12. С. 2541-2548;URL: https://fundamental-research.ru/ru/article/view?id=36725 (дата обращения: 04.07.2026).