



По мере развития средств вычислительной техники становится очевидной тенденция к широкому применению параллельных вычислений. Одной из основных задач, решаемых на ЭВМ, остается численное моделирование динамических систем, описываемых системами дифференциальных уравнений. Особый интерес представляет машинное решение нелинейных дифференциальных уравнений, как правило, не поддающихся решению аналитическим способом.
В большинстве инструментальных пакетов моделирования основным математическим аппаратом численного решения ОДУ остается семейство методов Рунге – Кутты. Эти хорошо изученные и зарекомендовавшие себя алгоритмы тем не менее имеют ряд существенных недостатков с точки зрения дальнейших перспектив развития моделирующих систем. В частности, алгоритмы методов Рунге – Кутты представляют собой жестко рекуррентные многостадийные итерационные процессы, плохо поддающиеся распараллеливанию. В последнее время возрос интерес к параллельным численным методам интегрирования, что отражено в большом количестве публикаций на данную тему, например [2, 3, 4]. При этом практически все известные авторам работы рассматривают варианты распараллеливания явных методов Рунге – Кутты или же непосредственно самих моделей динамических систем. При таком подходе сохраняются все недостатки явных методов Рунге – Кутты, связанные с их малой численной устойчивостью, накладывающей серьезные ограничения при моделировании жестких и разноскоростных систем. В настоящей работе рассматривается пример использования численных методов 2 и 4 порядка алгебраической точности, являющихся параллельными модификациями метода Эйлера и не относящихся к группе методов Рунге – Кутты, для численного моделирования нелинейных динамических систем.
Плоский нелинейный маятник
Классическая задача математического моделирования поведения плоского нелинейного маятника описывается следующим дифференциальным уравнением:
 (1)
(1)
где l – длина нити между шаром и подвесом; m – масса шара; θ – угол между текущей и устойчивой позицией шара; τ – внешняя сила, воздействующая на шар.
Произведем замену переменных состояния θ и  на z1 и z2 соответственно.
на z1 и z2 соответственно.
В нормальной форме Коши уравнение (1) примет вид
 (2)
(2)
где 

Алгоритм классического метода Рунге – Кутты второго порядка алгебраической точности (РК2) для решения системы (2) может быть описан следующей последовательностью действий:







 (3)
(3)
где h – величина шага интегрирования.
Классический алгоритм содержит 18 операций, необходимых для расчета решения на каждом шаге интегрирования, из них 8 умножений, 8 сложений и 2 операции взятия синуса.
Реализуем алгоритм (3) как виртуальный прибор среды моделирования NI LabVIEW. Лицевая панель – интерфейс виртуального прибора – показана на рис. 1.
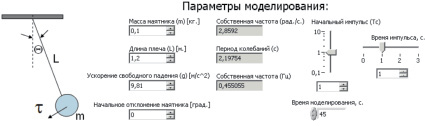
Рис. 1. Ввод параметров моделирования плоского нелинейного маятника на лицевой панели виртуального прибора
Рассмотрим поведение переменных состояния и фазовый портрет дискретной системы (3), смоделированной численным методом РК2. На рис. 2 представлен график зависимости расчетного угла отклонения маятника от времени, а также фазовый портрет системы при шаге интегрирования 0,1 c и времени моделирования 45 с.
Из рис. 1 видно, что накапливающаяся ошибка решателя приводит со временем к неустойчивости дискретной системы и расходящемуся решению, что является следствием малой численной устойчивости явных методов Рунге – Кутты.
Рассмотрим аналогичный решатель для предлагаемого параллельного метода второго порядка точности [2], называемого методом второго порядка с диагональной коррекцией (далее Д2). Алгоритм метода при решении системы (2) имеет вид




 ;
;
 , (4)
, (4)
где h – величина шага интегрирования.
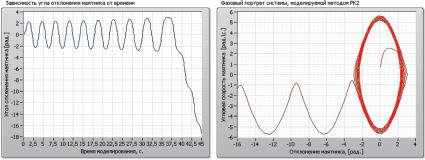
Рис. 2. Поведение системы (2) во временной области и фазовом пространстве при моделировании методом Рунге – Кутты 2
При этом можно заметить, что расчет z11 и z21 может быть выполнен независимо от расчета z12 и z22. При этом образуются два параллельных интегрирующих процессора. Усреднение значений переменных состояния, полученных на предыдущем шаге и являющихся выходными значениями на текущем, выполняются в составе параллельной части решателя (рис. 3) в том случае, если не требуется подача усредненного значения.
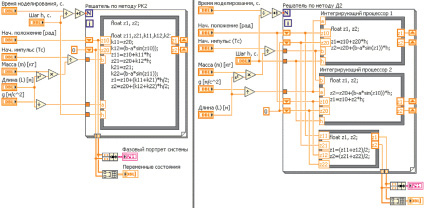
Рис. 3. Сравнение блок-диаграммы решателя системы (2) на основе метода РК2 (слева) и двухпроцессорного решателя на основе параллельного метода D2
Таким образом, алгоритм метода Д2 содержит 18 операций на шаге интегрирования, из которых 8 умножений, 8 сложений и 2 операции взятия синуса. Если при этом учесть параллельную структуру решателя, то количество последовательно выполняемых действий сокращается до 7 операций: из них 3 умножения, 3 сложения и 1 операция взятия синуса. Расчетное ускорение вычислений по сравнению с методом РК2 составляет около двух раз, причем можно предположить, что ускорение будет увеличиваться с ростом порядка моделируемой системы дифференциальных уравнений.
Кроме быстродействия и алгебраической точности при компьютерном моделировании динамических систем важную роль играет такая характеристика, как численная устойчивость метода. Известные аналитические способы определения устойчивости численных методов интегрирования предназначены для оценки устойчивости РК-методов, которые могут быть записаны в виде таблицы Бутчера. Однако Д-методы невозможно представить в виде таблицы Бутчера, т.к. они не опираются на обобщенную формулу Рунге – Кутты [5]. Это требует разработки другого подхода к оценке устойчивости Д-методов. Оценим устойчивость численного метода Д2 экспериментально, сравнив характеристики полученной с его помощью дискретной модели с характеристиками модели, построенной по методу РК2.
На рис. 4 представлен график поведения переменной состояния системы (2) и фазовый портрет при тех же параметрах моделирования (рис. 1), но при решении методом Д2.
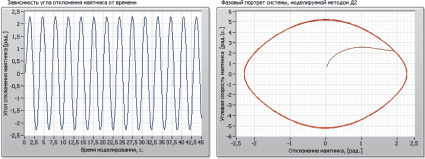
Рис. 4. Поведение системы (2) во временной области и фазовом пространстве при моделировании параллельным методом Д2
При сравнении рисунков (2) и (4) становится очевидным, что модель, построенная по методу Д2, остается устойчивой, на всем интервале времени моделирования сохраняя заданную погрешность расчета значений переменных состояния, в отличие от метода Рунге ‒ Кутты второго порядка. Напомним, что при этом метод Д2 имеет в два раза меньше последовательно выполняемых операций на шаге.
Задача моделирования аттрактора Лоренца
Интересным направлением в моделировании нелинейных динамических систем являются системы с управляемым хаосом, ярким примером которых является известная система дифференциальных уравнений Лоренца, называемая в некоторых источниках [5] также «странным аттрактором Лоренца» (5).
 (5)
(5)
Моделирование подобных систем предъявляет дополнительные требования к используемым численным методам, делая малопригодными методы второго порядка вследствие их малой области устойчивости и низкой точности решения. Поэтому для моделирования системы (5) используем параллельный метод четвертого порядка алгебраической точности Д4, описанный в работе [2]. Фазовый портрет системы (5) в трех измерениях, полученный путем моделирования со следующими параметрами: tмод = 80 с, σ = 10, r = 28, b = 2,6667, h = 0,01 с, представлен на рис. 5.
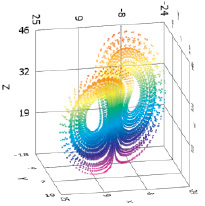
Рис. 5. Трехмерный фазовый портрет системы (5)
«Странный аттрактор» Лоренца, моделирование численным методом Д4.
При значении параметра r ≤ 13 значения переменных состояния системы сходятся к установившимся значениям, которые можно найти аналитически:
 (6)
(6)
Используем данное свойство системы для оценки погрешности ее моделирования предлагаемым численным методом. Максимальная абсолютная погрешность моделирования системы (5) методом Д4 относительно точных значений установившегося решения при параметрах моделирования: tмод = 40 с, σ = 10, r = 13, b = 2,6667, h = 0,01 с составляет Eуст = 1,3506∙10–7, что сопоставимо с погрешностью явного метода Рунге – Кутты 4 порядка (Eуст = 1,3509∙10–7). Это подтверждает пригодность предложенного численного метода для численного моделирования динамических систем с управляемым хаосом. При этом, обладая свойством вычислительного параллелизма, метод Д4 обеспечивает как минимум двукратное ускорение процесса моделирования по сравнению с методом РК4 при реализации на ЭВМ с параллельной архитектурой [1].
Заключение
В статье показано, что предложенный параллельный численный метод интегрирования второго порядка алгебраической точности имеет бо́льшую численную устойчивость при моделировании нелинейных систем, находящихся на грани устойчивости, по сравнению с классическим методом Рунге – Кутты 2. При реализации решателя по методу Д2 на вычислителях с параллельной архитектурой также достигается двукратное ускорение моделирования за счет сокращения числа последовательных операций на шаге интегрирования. Приведен пример моделирования нелинейной хаотической динамической системы параллельным численным методом 4 порядка алгебраической точности, проведена оценка погрешности полученного решения в установившемся режиме. В качестве дальнейшего развития изложенных в статье идей предполагается синтез Д-методов более высоких порядков алгебраической точности, а также адаптация подобных методов к работе с переменным шагом интегрирования. Результаты исследования могут быть использованы при моделировании нелинейных динамических систем на ЭВМ с параллельной архитектурой, в том числе в реальном масштабе времени, а также в составе пакетов компьютерного моделирования.
Работа выполнена при финансовой поддержке Российского фонда фундаментальных исследований в рамках договора № НК 14-01-31277\14 от 06.02.2014 г.
Рецензенты:
Авдеев Б.Я., д.т.н., профессор кафедры информационно-измерительных систем и технологий, ФГАОУ ВО «Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)», г. Санкт-Петербург;
Анисимов В.И., д.т.н., профессор кафедры систем автоматизированного проектирования, ФГАОУ ВО «Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)», г. Санкт-Петербург.
Работа поступила в редакцию 28.12.2014.
Библиографическая ссылка
Бутусов Д.Н., Островский В.Ю., Красильников А.В. МОДЕЛИРОВАНИЕ НЕЛИНЕЙНЫХ ДИНАМИЧЕСКИХ СИСТЕМ ПАРАЛЛЕЛЬНЫМИ ЧИСЛЕННЫМИ МЕТОДАМИ ИНТЕГРИРОВАНИЯ // Фундаментальные исследования. 2014. № 12-9. С. 1873-1877;URL: https://fundamental-research.ru/ru/article/view?id=36453 (дата обращения: 03.07.2026).