



В настоящее время все мероприятия по усовершенствованию металлорежущих станков напрямую связаны с развитием автоматизированного электропривода. Ранее применение находил электропривод по системе генератор – двигатель. Однако система генератор – двигатель является сравнительно сложной, дорогой и имеет низкий КПД. Замена в ряде случаев преобразователя системы генератор – двигатель полупроводниковым преобразователем, несомненно, целесообразна, т.к. при этом повышается КПД привода, уменьшаются его вес и габарит, повышается быстродействие привода. Особое значение приобретает модернизация уже находящихся в эксплуатации станков. В связи с этим автоматизация на существующих станках отдельных переходов, операций или наиболее часто встречающихся циклов может дать существенный эффект в отношении повышения производительности и облегчения обслуживания станка.
Цель исследования – разработка транзисторного электропривода подачи суппортов продольно-строгального станка.
Задачи:
- Рассчитать и обосновать двигатель постоянного тока с независимым возбуждением (ДПТНВ) и передаточное число редуктора.
- Рассчитать и обосновать элементную базу силовой части системы широтно-импульсный преобразователь – двигатель постоянного тока с независимым возбуждением (ШИП-ДПТНВ).
- Синтезировать двухзонную систему подчиненного регулирования системы ШИП-ДПТНВ.
Материалы и методы исследования
Предметом исследования является использование системы ШИП-ДПТНВ в приводе подачи продольно-строгального станка.
Результаты исследования и их обсуждение
Продольно-строгальный станок – металлообрабатывающий станок для обработки плоских и линейчатых поверхностей резцом. Предмет совершает прямолинейное рабочее движение, проходя под неподвижным резцом, который при окончании рабочего хода несколько сдвигается на сторону (движение подачи) для снятия следующей стружки.
Тахограмма и нагрузочная диаграмма механизма главного движения без учета динамических нагрузок представлены на рис. 1.
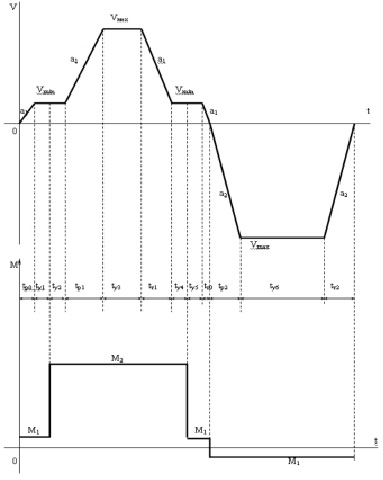
Рис. 1. Тахограмма и нагрузочная диаграмма механизма главного движения
Как вертикальные, так и боковые суппорты имеют самостоятельные коробки подач и индивидуальные электродвигатели. Электродвигатели коробок подач и главного движения сблокированы с таким расчетом, что при холостом движении главного двигателя, когда стол совершает обратное нерабочее движение, электродвигатели коробок подач совершают рабочее движение, т.е. движение подач.
В исследовании рассматривается наиболее тяжелый режим работы, когда суппорт нужно перенести из одного крайнего положения траверсы в другой. Тахограмма и нагрузочная диаграмма горизонтальной подачи суппортов по траверсе без учета динамических нагрузок представлены на рис. 2.
С помощью нагрузочной диаграммы возможно найти среднеквадратичное (эквивалентное по условиям нагрева) значение статической мощности, соответствующее реальному (обусловленному технологией) значению продолжительности включения электродвигателя по следующей формуле:
 (1)
(1)
где ωпод – скорость подачи, с–1; Мпод.р, Мпод.т, Мпод.раб – моменты разгона, торможения и рабочей скорости, Нм; tпод.р, tпод.т, tпод.раб, tобр – время разгона, торможения, движения на рабочей скорости и обратного хода, с.
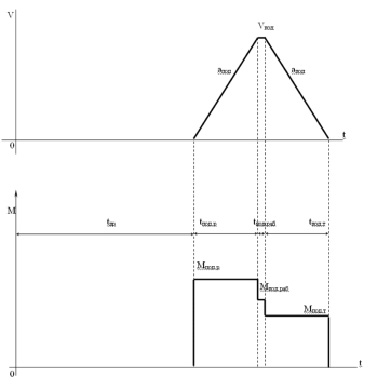
Риc. 2. Тахограмма и нагрузочная диаграмма горизонтальной подачи суппортов по траверсе при одном двойном ходе c учетом динамических нагрузок
Расчётную мощность двигателя в этом случае можно найти как
 (2)
(2)
где Кз = 1,1 – коэффициент запаса мощности при расчете с учетом динамических нагрузок; ηмех – КПД механизма (пары «рейка – колесо»); ПВст % – стандартная продолжительность включения.
Суммарный момент инерции возможно найти по формуле из [5]:
 (3)
(3)
где JΣ – суммарный момент инерции привода.
Требуемое передаточное число редуктора определяется по формуле
 (4)
(4)
С учетом формул (3) и (4) выбирается электродвигатель общепромышленной серии 2П по [4], исходя из условия минимума произведения ( ), а также редуктор по [3].
), а также редуктор по [3].
Для проверки двигателя на перегрузочную способность воспользуемся следующей формулой:
 (5)
(5)
где  – номинальный момент электродвигателя. (6)
– номинальный момент электродвигателя. (6)
Для проверки двигателя по нагреву можно использовать метод эквивалентных моментов, при этом должно выполняться следующее условие:
 (7)
(7)
Функциональная схема системы ШИП-ДПТНВ с возможностью регулирования напряжения на обмотке возбуждения предоставлена на рис. 3.
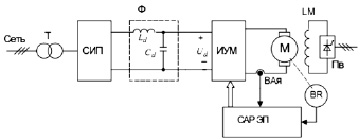
Рис. 3. Функциональная двухзонная схема системы ШИП-ДПТНВ
Расчет силовой части ведется по полученным данным двигателя и передаточного числа редуктора.
Трансформатор в управляемом вентильном электроприводе необходим для согласования напряжения сети с напряжением двигателя. Трансформатор выбирается по коэффициенту трансформации и типовой мощности.
Коэффициент трансформации трансформатора определяется как
 (8)
(8)
Типовая мощность трансформатора
 (9)
(9)
где q – коэффициент схемы.
Выбор и проверка тиристоров, принятых к установке в преобразователе, производится по трем параметрам: по среднему току, максимальному амплитудному значению напряжения на тиристоре и ударному току внутреннего короткого замыкания.
Среднее значение тока, протекающего через тиристор, А:
 (10)
(10)
где Iдоп – допустимый ток двигателя для общепромышленной серии машин.
Максимальное амплитудное напряжение на тиристоре, В:
 (11)
(11)
где kзн = 1,3...1,5 – коэффициент запаса по напряжению, учитывающий возможность перенапряжений на тиристорах; U2л – линейное действующее значение напряжения вторичной обмотки трансформатора.
Ударный ток внутреннего короткого замыкания находится по формуле, А:
 (12)
(12)
Выпрямленное напряжение сглаживается емкостным фильтром. Емкость фильтра Cф дополнительно выполняет следующие функции: накопителя энергии, возвращаемой электродвигателем в тормозном режиме, реактивной проводимости в цепи обратного тока и компенсатора индуктивного сопротивления трансформатора.
Емкость конденсатора фильтра с учетом перегрузки равна, Ф:
 (13)
(13)
Напряжение конденсатора фильтра, В:
 (14)
(14)
где kз = 1,3...1,5 – коэффициент запаса по напряжению.
Выбор транзисторов производится по следующим параметрам: по максимальному току перехода эмиттер-коллектор в открытом состоянии через транзистор и по максимальному напряжению перехода эмиттер-коллектор транзистора.
Максимальный ток якоря, приведенный к классификационным параметрам транзистора, А:
 (15)
(15)
где kси = 3 – коэффициент инвертирования; kохл = 1...2, 5 – коэффициент, учитывающий условия охлаждения; kз.шим = 1, 2 – коэффициент запаса на ШИМ пульсации.
Максимальное напряжение, которое прикладывается к транзистору во время его запирания, В:
 (16)
(16)
где kзн = 1,3 – коэффициент, учитывающий перенапряжение.
Для транзисторного электропривода с ШИП важным параметром является оптимальная частота коммутации, которая может быть вычислена по формуле
 (17)
(17)
где kf = 0,332 – коэффициент пропорциональности; t+ , t– – время нарастания и спада коллекторного тока транзистора, мкс.
Для того чтобы удостовериться в правильности выбора электродвигателя и полупроводникового преобразователя, воспроизведем работу электропривода согласно тахограмме и нагрузочной диаграмме привода подачи в программе Simulink Matlab.
Структурная схема электропривода, составленная с помощью программы Simulink Matlab, представлена на рис. 4.
Рассмотрим наиболее интересующий переходный процесс – по скорости, который представлен на рис. 5.
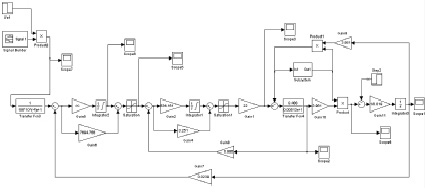
Рис. 4. Структурная схема электропривода подачи в Simulink Matlab
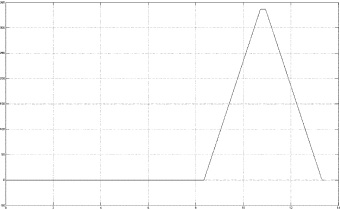
Рис. 5. Переходный процесс по скорости электропривода подачи
Результаты имитационного моделирования доказали, что переходный процесс по скорости полностью повторяет ранее рассмотренную тахограмму привода подачи продольно-строгального станка (рис. 2).
Заключение
- Предложена методика расчета требуемой мощности двигателя и передаточного числа редуктора.
- Рассчитана элементная база силовой части электропривода.
- Произведен расчет замкнутой системы регулирования скорости, с обратной связью по току, скорости, магнитному потоку и ЭДС, а также были рассчитаны регуляторы по каждому из контуров.
Рецензенты:
Аносов В.Н., д.т.н., профессор, заведующий кафедрой электропривода и автоматизации промышленных установок (ЭАПУ), НГТУ, г. Новосибирск;
Алиферов А.И., д.т.н., профессор, заведующий кафедрой автоматизированных электротехнологических установок (АЭТУ), НГТУ, г. Новосибирск.
Работа поступила в редакцию 05.08.2014.
Библиографическая ссылка
Дымов И.С., Макаров С.В., Гурова Е.Г., Котин Д.А. МОДЕРНИЗАЦИЯ ПРИВОДА ПОДАЧИ ПРОДОЛЬНО-СТРОГАЛЬНОГО СТАНКА // Фундаментальные исследования. 2014. № 9-7. С. 1430-1435;URL: https://fundamental-research.ru/ru/article/view?id=35079 (дата обращения: 02.07.2026).