



Постоянное совершенствование элементной базы для реализации устройств цифровой обработки сигналов привело к повышению практического интереса к системам активного подавления акустических шумов (АПШ). Принцип работы этих систем заключается в формировании компенсирующего сигнала, находящегося в противофазе с подавляемым шумом. Система АПШ, вычислительную основу которой в большинстве случаев представляет цифровой адаптивный фильтр (АФ), в реальном времени анализирует шум, подлежащий подавлению, и в соответствии с его изменениями подстраивает компенсирующий сигнал.
Использование систем АПШ имеет ряд ограничений. Принципиальную возможность реализации системы АПШ определяют условия распространения шума в предполагаемой области его подавления и спектральный состав шума [6, 11]. Производительность практически реализуемой системы АПШ определяется ее архитектурой, а также техническими характеристиками ее компонентов, одним из которых является АФ.
Целями данной работы являются:
- обзор задач АПШ и выявление среди них тех, для которых актуальным является повышение производительности АФ;
- анализ возможностей реализации АФ повышенной производительности на современной элементной базе.
Классификация задач АПШ и выделение практически реализуемых систем АПШ
По наличию или отсутствию поверхностей, отражающих шум, в области его подавления задачи АПШ делятся на три категории – АПШ в открытом пространстве, АПШ в замкнутом пространстве и АПШ в полузамкнутом пространстве [9, 11].
Шумы, подлежащие подавлению, могут быть периодическими или непериодическими, в том числе случайными. Периодические шумы, подавляемые системами АПШ, как правило, являются узкополосными и содержат основной тон и несколько его гармоник. Для подавления таких шумов требуются АФ относительно невысоких порядков (по 4–20 весовых коэффициентов на каждую гармонику). Случайные шумы являются широкополосными, и для их подавления требуются АФ значительно более высоких порядков – несколько сотен или тысяч весовых коэффициентов [6, 9].
По области действия системы АПШ разделяют задачи глобального и локального подавления шума. Глобальное подавление шума достигнуто, если во всей области распространения шума удалось получить его равномерное снижение. Если получить такой результат невозможно, может ставиться задача локального подавления шума, т.е. снижения уровня шума в части области его распространения.
Наиболее распространенными архитектурами систем АПШ [5, 9] являются системы с опорным сигналом (рис. 1) и системы с обратной связью (рис. 2), работающие по алгоритму FXLMS [9]. На рис. 1 и 2 P(z), W(z), H(z), C(z) обозначают соответственно передаточные функции акустического пути распространения шума до микрофона ошибки, адаптивного фильтра, пути компенсации шума и его оценки [9].
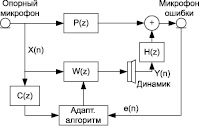
Рис. 1. Система АПШ с опорным сигналом
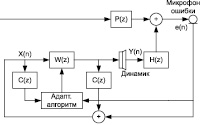
Рис. 2. Система АПШ с обратной связью
В состав систем с опорным сигналом входит опорный микрофон или датчик другого типа, регистрирующий шум в выбранной точке. На основе опорного сигнала X(n) АФ системы АПШ вырабатывает сигнал Y(n), поступающий на компенсирующий источник шума. Чаще всего им является динамик [7]. Микрофон ошибки регистрирует остаточный шум e(n), который минимизируется системой АПШ за счет обновления весовых коэффициентов АФ. Система АПШ с опорным сигналом для непериодических сигналов должна быть каузальной [5, 9].
Системы АПШ с обратной связью не содержат опорного датчика, а формируют опорный сигнал из сигнала ошибки [6, 9]. Ширина спектра подавляемого шума зависит от производительности системы АПШ, т.к. в течение времени tе формирования Y(n) коэффициент корреляции подавляемого шума должен оставаться высоким. Малое расстояние между динамиком и микрофоном ошибки ограничивает область применения систем АПШ с обратной связью задачами локального подавления шума [6].
Отбросим задачи АПШ, которые являются нерешаемыми с использованием существующих в настоящее время подходов.
АПШ в открытом пространстве. Глобальное подавление непериодического широкополосного шума в открытом пространстве практически нереализуемо [6, 11].
Для систем АПШ с опорным сигналом это связано с противоречащими друг другу ограничениями каузальности и максимального расстояния между источником шума и компенсирующим источником. Ограничение каузальности для системы АПШ с опорным сигналом состоит в том, что на основании X(n) система должна выработать Y(n) за время групповой задержки tе, не превышающее время ta распространения шума от опорного микрофона до динамика при расстоянии L между этими устройствами и скорости звука c:
 (1)
(1)
Из (1) следует, что для системы с опорным сигналом L не может быть меньше, чем c⋅te. С другой стороны, для достижения подавления шума не хуже 10 дБ одиночным компенсирующим источником L не должно превышать 0,1λ; несколькими источниками – 0,5λ, где λ – длина волны подавляемого шума [11]. На практике соблюдение обоих условий достижимо для шумов, в спектре которых содержатся частоты не выше нескольких десятков Гц. Локальное подавление непериодических шумов в открытом пространстве возможно с использованием систем АПШ обеих архитектур [6]. Глобальное подавление периодических шумов в открытом пространстве возможно и используется на практике [6,11], т.к. ограничение каузальности на систему АПШ в этом случае не накладывается.
АПШ в полузамкнутых пространствах. В качестве полузамкнутых пространств на практике рассматриваются воздуховоды систем кондиционирования, системы промышленных вентиляторов и т.п. [6, 9, 11]. Глобальное подавление шума при распространении только плоской волны возможно как для периодических, так и для широкополосных случайных шумов [6]. При этом достаточно одноканальной системы АПШ, т.е. содержащей один опорный микрофон, один динамик и один микрофон ошибки. При подавлении случайного шума на систему АПШ накладывается ограничение каузальности, а порядок АФ значительно возрастает. Если распространяются также моды высших порядков, подавление шума возможно при переходе к многоканальным системам АПШ, причем на каждую моду должны быть предусмотрены микрофон ошибки и динамик. В большинстве случаев используются АПШ с опорным сигналом, т.к. они обеспечивают более высокую производительность [6].
АПШ в замкнутых пространствах. Задача глобального АПШ решаема только для небольших помещений (салоны автомобилей и т.п.), и только до тех пор, пока распространение звука носит модальный характер. Глобальное подавление широкополосных случайных шумов или высокочастотных тональных шумов, проникающих в замкнутое пространство, оценивается как практически нереализуемое [6]. Глобальное подавление периодических шумов низкой частоты возможно на практике; при этом используются многоканальные системы АПШ, которые могут содержать по несколько десятков микрофонов и динамиков [5]. Локальное подавление низкочастотного (ниже 300 Гц) случайного шума в замкнутом пространстве возможно с использованием систем АПШ с обратной связью [6].
Возможности повышения производительности систем АПШ
Повышение производительности реализуемых на практике систем АПШ может заключаться:
- в увеличении количества операций умножения с накоплением, выполняемых АФ за интервал дискретизации системы АПШ, что может понадобиться и при повышении порядка АФ (работа с широкополосными шумами), и при увеличении количества каналов системы АПШ (подавление шума в замкнутом пространстве);
- в сокращении групповой задержки системы АПШ te, что актуально для систем АПШ с обратной связью, а также каузальных систем АПШ с опорным сигналом [6, 9].
Рассмотрим, как можно повлиять на указанные выше характеристики систем АПШ за счет управления характеристиками АФ.
Количество одновременно выполняемых операций умножения с накоплением является непосредственной характеристикой производительности АФ. Данная характеристика зависит от возможностей элементной базы, на которой реализуется АФ.
Групповая задержка системы АПШ te является комплексной характеристикой, которая складывается из следующих составляющих [6, 9]: групповая задержка антиэлайзингового фильтра, стоящего перед АЦП; задержка, вносимая устройствами выборки и хранения АЦП и ЦАП; время преобразования АЦП и ЦАП; время обработки входного отсчета АФ tW; групповая задержка сглаживающего фильтра на выходе ЦАП; групповая задержка динамика tL, групповая задержка АФ δW.
Принимать меры по снижению δW целесообразно только в том случае, если она вносит существенный вклад в групповую задержку системы АПШ в целом. Согласно [5], групповая задержка системы АПШ без учета вклада динамика и АФ может быть определена по формуле (2)
 (2)
(2)
где M – суммарное количество полюсов антиэлайзингового и сглаживающего фильтров. На практике M составляет 8–16. Формула (2) справедлива, если в системе АПШ применяются АЦП последовательного приближения и ЦАП с формированием весовых токов резистивными цепями, групповые задержки которых составляют до нескольких десятков мкс [1, 5]. Использование ΣΔ – ЦАП и АЦП общего назначения приводит к внесению каждым из этих устройств групповой задержки в несколько десятков интервалов дискретизации [5]. Однако существуют специализированные микросхемы для задач АПШ, характеризующиеся малыми групповыми задержками ΣΔ – ЦАП и АЦП, например [10].
Групповая задержка динамика tL, т.е. время преобразования электрического сигнала в акустический, зависит как от электромеханических параметров динамика, так и от частоты генерируемого им гасящего сигнала. На рис. 3 показаны расчеты зависимости tL НЧ-динамиков различных производителей с резонансной частотой порядка 25–45 Гц от частоты. Расчеты и построение графиков выполнены с помощью приложения JBL Speakershop EM [8] для акустического оформления типа «закрытый ящик». Можно заключить, что типичные значения tL НЧ-динамиков в диапазоне частот 100–200 Гц находятся в диапазоне 2–0,5 мс. На более низких частотах tL сильнее зависит от параметров динамика и должна рассматриваться индивидуально. На частотах выше 500 Гц tL обычно менее 0,5 мс.
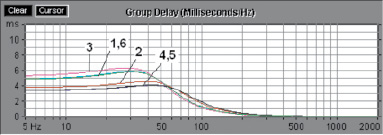
Рис. 3. Групповые задержки НЧ-динамиков различных производителей в зависимости от частоты: 1 – JBL 116A; 2 – JBL 1200GTi; 3 – Cadence CW0A10-4; 4 – Bostwick-1048; 5 – Vifa P17WG-00-08; 6 – Alpine 6002cx
Время обработки tW, вносимое цифровым фильтром в te, не превышает 1/fs. Но цифровой фильтр имеет еще групповую задержку δW, пропорциональную его порядку. Для КИХ-фильтра порядка N с симметричной импульсной характеристикой δW ≈ N/2fs. Если в системе АПШ используются фильтры высоких порядков, они могут внести в компенсирующий сигнал задержку, сопоставимую с групповой задержкой динамика или даже превышающую ее. Так, например, tL НЧ-динамика № 4 на частоте 50 Гц равна 4 мс (рис. 3). При fs системы АПШ, равной 2 кГц, и N = 250 групповая задержка АФ составит 62,5 мс.
Если снизить порядок АФ не представляется возможным, для снижения δW остается повышать fs. Однако на выбор fs системы АПШ накладывается несколько ограничений, наиболее важным из которых является влияние fs на стабильность и скорость сходимости адаптивного алгоритма [6, 11], которые резко ухудшаются при выходе из рекомендуемого диапазона fs. Поэтому при повышении fs ради снижения δW обновление весовых коэффициентов АФ должно вестись с более медленной скоростью.
Таким образом, по сравнению с другими составляющими системы АПШ, групповая задержка АФ высоких порядков может вносить в te существенный вклад. Повышение fs требует от системы АПШ сокращения временных затрат на вычисление отсчетов Y(n) и обновление весовых коэффициентов, что, в свою очередь, требует от элементной базы, на которой реализуется АФ, высокой вычислительной производительности.
Возможности аппаратной реализации высокопроизводительных АФ
Среди готовых электронных компонентов, предназначенных для реализации устройств цифровой обработки сигналов, можно выделить два класса – цифровые сигнальные процессоры (ЦСП) и ПЛИС архитектуры FPGA.
Возможности ЦСП. Для выполнения операций цифровой обработки сигналов ЦСП оснащаются аппаратным блоком умножения с накоплением, который выполняет эту операцию последовательно столько раз, сколько этого требует реализуемый алгоритм. Поскольку АПШ работает в реальном времени, необходимо, чтобы все операции были выполнены за интервал дискретизации. Согласно [5], оценить требуемое для конкретной задачи АПШ количество операций в секунду при условии, что в качестве адаптивного алгоритма используется FXLMS [9], а система АПШ использует опорные сигналы, можно по формуле (3)
P ≈ (20…50)⋅(N + M)⋅I⋅J⋅K⋅fs, (3)
где N – порядок АФ; M – порядок фильтра, моделирующего передаточную функцию пути гашения [9]; I – количество опорных микрофонов; J – количество микрофонов ошибки; K – количество динамиков. При этом требуемое на каждый отсчет X(n) количество операций умножения в (3) определяется из соотношения (N + M)⋅I⋅J⋅K, а множитель (20...50) учитывает вспомогательные операции.
Согласно [3, 12], современные ЦСП позволяют выполнять от нескольких сотен до нескольких тысяч MMACs – миллионов операций умножения с накоплением в секунду – при рабочих частотах в несколько сотен МГц. Для задач подавления периодических шумов одноканальной системой АПШ этого достаточно [4, 6]. Многоканальные системы АПШ, предназначенные для подавления широкополосных шумов, требуют от ЦСП значительно большей производительности. Так, у систем АПШ, разрабатываемых для замкнутых пространств, значения M и N могут составлять несколько сотен или тысяч, а I, J, и K – по несколько десятков [5, 9]. Для реализации системы АПШ в таком случае может потребоваться несколько ЦСП.
Возможности FPGA. На базе ресурсов FPGA обеспечить выполнение требуемого количества операций за интервал дискретизации проще, т.к. эти устройства содержат до нескольких тысяч встроенных аппаратных блоков умножения с накоплением, которые могут работать параллельно с тактовыми частотами порядка 400–700 МГц [13]. Подготовительные и вспомогательные операции цифровой части системы АПШ могут выполняться на программируемых ресурсах FPGA параллельно операциям умножения.
То, что ресурсы FPGA и соединения между ними являются программируемыми, открывает дополнительные возможности получения высокопроизводительных АФ за счет реализации фильтров оригинальной структуры. Одной из таких возможностей является реализация структуры фильтра, работающего по принципу распределенных вычислений [2], при котором латентность фильтра зависит не от его порядка, а от разрядности входных отсчетов. Т.к. результат вычисления каждого отсчета выходного сигнала выдается намного раньше, чем при использовании традиционной трансверсальной структуры фильтра, появляются дополнительные возможности увеличения fs.
Заключение
Выполненная работа определяет круг задач АПШ, для решения которых целесообразно использовать высокопроизводительные структуры АФ. К таким задачам относится подавление широкополосного шума многоканальными системами АПШ, а также задачи, для которых критичным параметром является групповая задержка системы АПШ. Для аппаратной реализации АФ в составе вышеуказанных систем АПШ общей рекомендацией является выбор ПЛИС FPGA.
Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта №14-07-31091 мол_а.
Рецензенты:
Бабич М.Ю., д.т.н., главный специалист ОАО «НПП «Рубин», г. Пенза;
Светлов А.В., д.т.н., профессор, заведующий кафедрой «Радиотехника и радиоэлектронные системы», ФГБОУ ВПО «Пензенский государственный университет», г. Пенза.
Работа поступила в редакцию 15.07.2014.
Библиографическая ссылка
Ушенина И.В. ОЦЕНКА ЭФФЕКТИВНОСТИ ПРИМЕНЕНИЯ ВЫСОКОПРОИЗВОДИТЕЛЬНЫХ ЦИФРОВЫХ АДАПТИВНЫХ ФИЛЬТРОВ В СИСТЕМАХ АКТИВНОГО ПОДАВЛЕНИЯ АКУСТИЧЕСКИХ ШУМОВ // Фундаментальные исследования. 2014. № 9-5. С. 998-1002;URL: https://fundamental-research.ru/ru/article/view?id=35004 (дата обращения: 02.07.2026).